 基于X-STM32MP-RBT01机器人控制板的技术解析与应用指南
基于X-STM32MP-RBT01机器人控制板的技术解析与应用指南

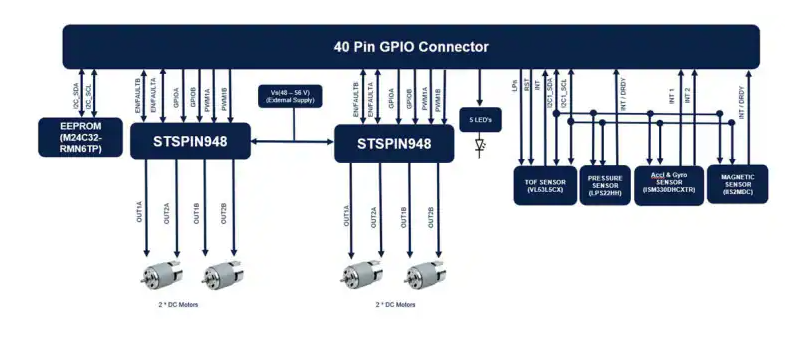
STMicroelectronics X-STM32MP-RBT01机器人板,带STSPIN948电机驱动器IC,用于有刷直流电机。该板通过使用UART、I^2^C、PWM和GPIO连接的40引脚GPIO连接器与STM32MP微处理器连接。X-STM32MP-RBT01板可通过高达48V电源和两个STSPIN948微处理器同时驱动四台直流电机。该板与STM32MP157F-DK2、STM32MP257F-DK和Raspberry Pi的GPIO连接器布局兼容。X-STM32MP-RBT01板用于工厂自动化、家用电器、专业家电和工业机器人等应用。
数据手册;*附件:STMicroelectronics X-STM32MP-RBT01机器人板(带STSPIN948)数据手册.pdf
特性
- STSPIN948电机驱动器IC
- 能够同时驱动四个直流电机
- ISM330DHCXTR板载iNEMO惯性模块,用于加速度计和陀螺仪
- LPS22HH用于高度测量的压力传感器
- IIS2MDC位置精度磁力计
- VL53L5CX和ToF传感器
- 电源和电机用LED
- M24C32-RMN6TP和EEPROM,用于自动GPIO设置和驱动器设置
- 兼容STM32MP157F-DK2、STM32MP257F-DK和Raspberry Pi的GPIO连接器布局
连接器示意图
基于X-STM32MP-RBT01机器人控制板的技术解析与应用指南
一、核心特性概述
X-STM32MP-RBT01是STMicroelectronics推出的机器人应用扩展板,其核心创新点在于双STSPIN948电机驱动架构,可同时控制4路有刷直流电机,每路支持2.5A持续电流(峰值4.5A)和48V高压输入,总功率达480W。该板卡通过40针GPIO接口与STM32MP系列MPU(如STM32MP157F-DK2)或树莓派兼容,集成I2C/UART/PWM多协议通信,并配备六轴IMU、磁力计、气压计及ToF传感器,构成完整的机器人运动与环境感知系统。
二、关键硬件模块解析
电机驱动子系统
传感器融合方案
传感器类型 型号 性能参数 应用场景 六轴IMU ISM330DHCXTR ±16g加速度/±4000dps陀螺仪 姿态估计 磁力计 IIS2MDC ±50高斯动态范围 电子罗盘 气压计 LPS22HH 260-1260hPa测量范围 高度定位 ToF传感器 VL53L5CX 8x8多区域测距(最长4m) 避障导航 系统管理设计
- EEPROM(M24C32)自动配置GPIO与驱动参数
- 5路状态LED(红/绿双色)指示电机运行与故障
- 通过I2C1总线(SCL/SDA)统一管理所有传感器
三、典型应用电路设计要点
- 电机接口布局
- 功率走线宽度≥2mm(1oz铜厚),采用星型拓扑减少共模干扰
- 电流检测路径使用Kelvin连接法(如CN3/CN4接口的SENSEA/B引脚)
- 传感器布线建议
- IMU与磁力计远离电机驱动模块(建议间距>30mm)
- ToF传感器VL53L5CX需独立3.3V供电,并添加47KΩ上拉电阻
四、应用场景扩展
该板卡特别适用于:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
215文章
31723浏览量
224771 -
电机驱动器
+关注
关注
16文章
883浏览量
66796 -
有刷直流电机
+关注
关注
1文章
137浏览量
13677
发布评论请先 登录
相关推荐
热点推荐
在昉·星光开发板上通舵机控制板实现机器人舵机控制
本次课程为昉·星光开发板IoT开发系列课程的第十六讲,将带领同学们在昉·星光开发板上,通舵机控制板,实现机器人舵机控制。
本次课程,在昉·星
发表于 03-09 06:23
自律型机器人制作入门.基于Arduino
]昨天 14:47 上传内容介绍《自律型机器人制作入门:基于Arduino》基于开源硬件思想,完全公开各个结构件的外观尺寸,控制板基于开源硬件领域内广泛使用的Arduino,采用在Arduino之上又封装
发表于 06-23 11:18
【MYD-Y6ULX申请】机器人运动控制板(电机控制)项目
项目名称:机器人运动控制板(电机控制)项目试用计划:本人目前从事机器人嵌入式软件开发,专注于电机控制,实现电机运动
发表于 01-22 10:32
嵌入式系统在机器人中的应用
它还需要负责将远程用户端传送过来的控制命令解析并转发给ARM 7控制板并接收反馈信息。 图2.3 远程机器指令流程 图2.3显示了远程指令的数据流向以及
发表于 07-06 11:08
怎样去设计一种基于STM32F407ZGT6芯片控制板机器人的运动控制系统?
如何去验证电机的运动性能?怎样去设计一种基于STM32F407ZGT6芯片控制板机器人的运动控制系统?
发表于 06-29 08:34
基于STM32F373的AIWM六足控制板
描述AIWM六足控制板这是AIWM六足机器人的控制板。基于STM32F373微控制器的板子,可以使用WIFI-UART桥(HLK-RM04)
发表于 08-15 06:10




评论