 ADI “激活边缘智能 共绘具身未来” 人形机器人分享会:聚焦技术突破与产业落地
ADI “激活边缘智能 共绘具身未来” 人形机器人分享会:聚焦技术突破与产业落地

2025 年 9 月 16 日,全球领先的半导体公司 ADI(亚德诺半导体)在北京大兴区亦庄经济技术开发区丰大国际大酒店举办 “激活边缘智能 共绘具身未来” 人形机器人媒体分享会。本次活动汇聚行业专家、北京市优秀人形机器人企业代表与产业媒体,围绕人形机器人技术创新、商业化落地及未来趋势展开深度交流。ADI 公司院士兼技术副总裁陈宝兴博士发表主题演讲,多家合作伙伴分享实践经验,圆桌论坛环节更是碰撞出诸多行业洞见。
ADI 陈宝兴博士主题演讲:从数字工厂到人形机器人,构建工业智能核心能力

陈宝兴博士以《从数字工厂到人形机器人,全方位构建工业智能未来》为主题,系统阐述了 ADI 在人形机器人领域的技术布局、核心优势及行业判断,为现场电子研发工程师群体呈现了兼具技术深度与产业视角的内容。
工业智能进化:从数字驱动到物理智能
陈宝兴博士指出,过去 10 年数字工厂推动了生产自动化与数字驱动决策,但物理智能 —— 机器对环境的感知、理解与灵巧操作,将成为工业智能的未来核心方向。他将 AI 发展梳理为清晰的时间轴:1950 年图灵测试开启机器 “思考” 探索,1956 年达特茅斯会议确立人工智能学科,2012 年深度学习突破推动机器视觉与语音识别升级,2022 年生成式 AI(如 ChatGPT)进入全民时代,而 2025-2030 年将是具身机器人从概念走向现实、推动产业变革的关键阶段。
陈宝兴博士强调,AI、自动化与机器人此前分属不同赛道,如今正融合成 “超级生态”,而人形机器人正是这一生态的浓缩载体 —— 可将现代工厂视为 “巨型机器人”(传感器为眼睛、高速连接为神经网络、电机执行系统为肌肉、控制解译系统为大脑),人形机器人则是具备灵巧 “人体” 的 “工厂超级员工”。
人形机器人核心技术:四大能力与五大类人灵巧要素
陈宝兴博士从技术维度拆解了人形机器人的核心需求,包括:
感知能力:需实现 “多模态感知融合”,结合视觉与触觉判断物体形态,提升操作灵巧度;
连接能力:需高速、稳定的 “神经网络”,ADI 提供 GMSL、以太网(高速数据传输)、60GHz 无线连接(关节数据传输)、ISO-USB(安全维护调试)等方案;
控制能力:依赖 AI 驱动的运动控制算法,实现多关节同步协调,完成类人复杂动作;
解译能力:让机器人 “理解” 环境与任务,而非仅执行指令。
针对 “类人灵巧” 这一关键突破点,他提出五大技术要素:
1.低延迟:控制环路总延迟需≤10-20ms(类比人类 20-50ms 的脊髓反射),ADI 通过 1ms 响应的磁触觉阵列、边缘 AI 实时推理、毫秒级通信(GMSL / 以太网)及高响应电机驱动,实现各环节延迟极致优化;
2.精密电机控制:需高分辨率位置与力反馈,对标人类手指精准的力度与角度控制;
3.触觉传感:感知压力、滑移与材质变化,ADI 研发的磁耦合触觉传感器可克服传统压阻式、电容式、光学传感器受水分、灰尘影响的缺陷;
4.高速互联:低抖动的数据通路,保障信号实时传输;
5.高宽带数据共享:支持 “边云协同”,实现本地与云端数据高效同步,助力 AI 算法优化动作。
同时,他还对比了当前机器人与人类在精度、灵敏度上的差距:当前机器人角度检测精度为 ±0.1-0.5 度(目标 ±0.02-0.05 度)、触觉灵敏度需识别 1g 压力 / 1mm 位移、运动控制精度 ±1-2mm(目标 0.01mm)、关节协同延迟 5-10ms(目标 1ms),明确了技术攻坚方向。
ADI 的技术落地路径:物理智能与 AI 深度融合
陈宝兴博士提出,加速人形机器人落地的核心是AI 与物理智能的深度融合——AI 是 “大脑”(学习、推理、决策),物理智能是 “身体”(感知、运动、环境互动)。ADI 正将传感器与执行器模型集成进 NVIDIA Isaac Sim 平台,通过数字孪生仿真生成训练数据,解决工业场景复杂、可训练数据少的难题,实现 “Sim2Real(从仿真到现实)” 突破。
他特别强调,中国凭借领先的制造业能力、充沛的工程人才、稳健的供应链及 “中国速度”,已成为人形机器人从原型走向量产的核心市场,ADI 愿与本土伙伴共建具身智能生态圈。
国家地方共建具身智能机器人创新中心:开源与全链路技术突破

国家地方共建具身智能机器人创新中心品牌公关负责人魏嘉星介绍,当前人形机器人需提升可靠性与稳定性,重点聚焦物流、分拣、高危场景等工业应用。其团队通过技术迭代解决关节损坏、发热等问题,旗下 “天工” 机器人平台支持自主导航(如机器人运动会 100 米 / 400 米 / 1500 米全自主完赛),并发布通用具身智能平台 “慧思开物”(“具身大脑 + 具身小脑” 架构)。同时,中心持续推进开源,已开放 10 万余条多元数据集及 “天工” 机器人 URDF 模型与 ROS 控制栈,助力开发者快速验证算法。
北京因时机器人:灵巧手与零部件模块化创新

因时机器人 CMO 房海南女士指出,灵巧手是人形机器人智能的关键突破口(如特斯拉 Optimus Gen3 难点)。因时从零部件出发,聚焦一体化、微型化技术,率先量产一体化线性执行器(微型伺服电缸),产品一致性与良率可支持万台级量产。她认为,零部件技术不仅服务于机器人,还可拓展至工业、医疗等领域(如微型丝杠),当前应先解决物流分拣等 “单一场景、大需求” 问题,再逐步向通用泛化突破,3-5 年内康养、服务场景有望迎来应用增长。
松延动力人形机器人:高动态平衡与成本优化
松延动力人形机器人电控系统负责人吴雅剑分享了机器人完成空翻动作的技术逻辑:通过位姿优化算法(映射拟人数据、强化训练)、毫秒级延时控制、高传动比设计(毫秒级瞬间放电)及能量回收技术,结合稳定的结构本体,实现连续九次空翻。同时,他提到当前量产面临具身 AI 壁垒与核心零部件成本高的挑战,松延正围绕具身 AI 突破与成本优化推进研发。

圆桌论坛对话,聚焦 “从原型到量产” 的挑战与机遇
本次圆桌论坛由 ADI 中国区工业市场总监蔡振宇主持,四位嘉宾围绕 “人形机器人商业化突破之路” 展开讨论。陈宝兴博士认为,当前物理智能与 AI 融合不足,AI 对物理环境认知有限,复杂场景(如不同物体抓取)的数据训练难度大,需通过精准物理模型与数字孪生仿真优化;国家地方共建具身智能机器人创新中心具身天工事业部负责人刘益彰补充,量产需先提升机器人整体可靠性,再拓展场景;因时机器人CMO房海南女士提出,市场对机器人期待高于当前发展速度,需 “分步落地”,先解决简单场景需求;松延动力人形机器人吴雅剑则强调,具身 AI(如无彩排完成递水等灵活任务)与成本是量产关键。
在未来落地的预测上,专家认为短期3年内落地会有固定工作操作的工业场景、物流分拣率先落地,中期3-5年会在康养和无人零售场景逐步渗透。长期5-10年实现人机深度交互、机器人进入家庭实现陪伴和自主任务规划,如理解人类意图、完成复杂协助。
ADI 机器人相关产品技术详解
本次分享会 ADI 展出了两款核心产品,针对人形机器人关键需求提供解决方案,为电子研发工程师提供明确的技术选型参考。
(一)创新型多圈传感器 ADMT4000:解决关节位置记忆难题
1. 核心优势
•无电池 / 无齿轮设计:采用磁畴壁可控传播技术,无源状态下精确记录多圈旋转运动,无需备用电池或机械齿轮,省去上电归位 / 校准步骤;
•高精度与宽量程:绝对测量范围 46 圈,全量程精度 ±0.25 度,可替代线性执行器中的线性传感器;
•抗干扰能力:通过磁屏蔽层抑制外部杂散磁场,适配机器人复杂电磁环境。
2. 工作原理
•利用外部永磁体(固定于关节旋转部分)驱动磁性纳米导线中磁畴壁位移,将旋转运动转换为一维线性位移;
•沿导线集成 4 个巨磁阻(GMR)检测点,通过电阻值变化捕捉磁畴壁位置,反演关节绝对角度与累计圈数;
•磁畴壁位置为稳定物理状态,断电后信息不丢失,上电后一次电阻读取即可获取当前位置。
3. 应用注意事项
•磁场窗口控制:需确保 16-31mT 磁场强度(低于 16mT 磁畴无法移动,高于 31mT 易产生错误计数或复位);
•磁屏蔽建议:采用 ADI 参考设计的 PCB 屏蔽层,减少外部磁场干扰。
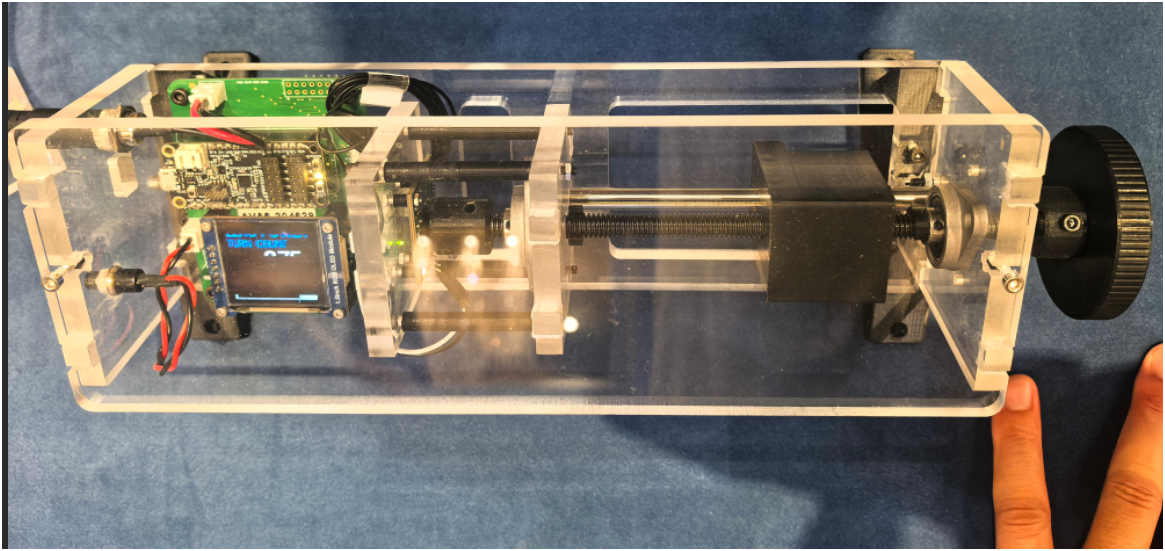
(二)高集成单片伺服驱控芯片 TMC9660:简化伺服驱动单元设计
1. 核心优势
•高度集成:单芯片集成 MCU、伺服三环控制(位置 / 速度 / 电流)、70V/2A 智能栅极驱动器(GDRV)、运放、LDOs 及 Buck 转换器,仅需外置功率 MOSFET 即可构成完整伺服单元;
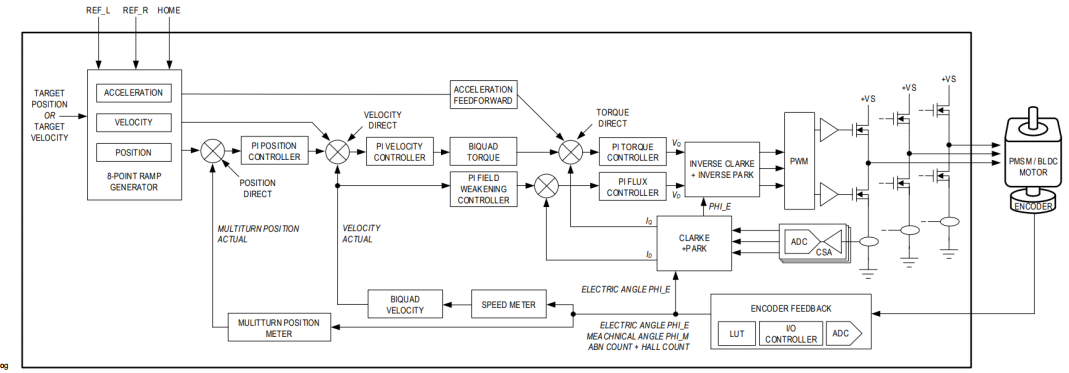
•高效控制:内置硬件 FOC(磁场定向控制),无需繁琐软件算法开发;支持 100kHz 伺服环路控制与 8 点 Ramp 轨迹发生器,保障运动精度与效率;
•全面保护:集成保护诊断单元(PTU),应对过流、过压、过热等故障。
3.应用场景
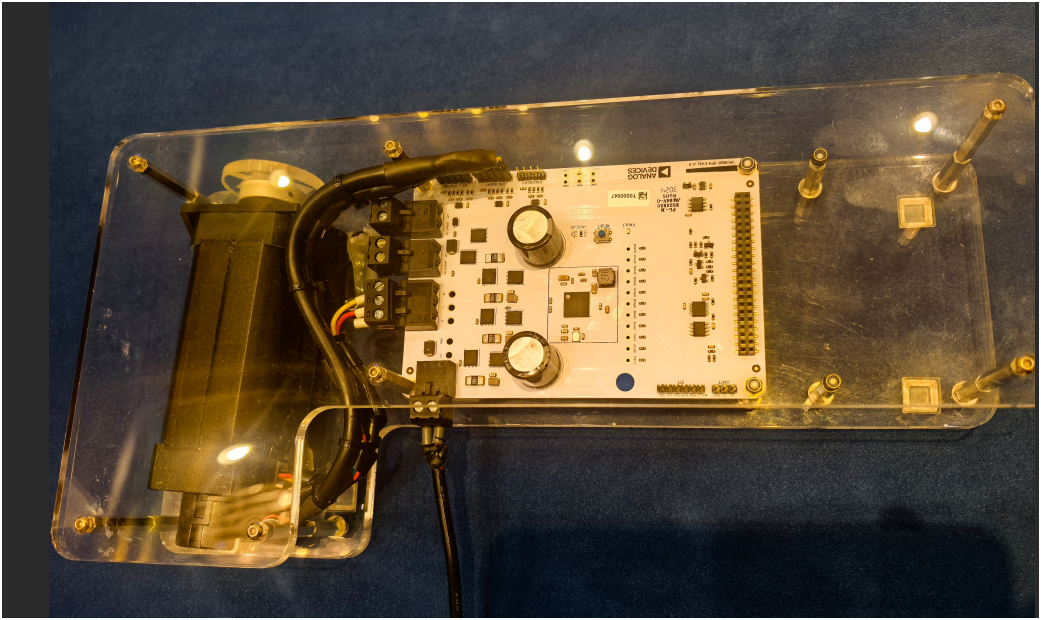
适用于人形机器人关节驱动、灵巧手执行器等需高精度伺服控制的场景,可简化硬件设计、缩小 PCB 面积,同时提升控制响应速度。
写在最后
分享会不仅展现了 ADI 在人形机器人感知、控制、连接等核心环节的技术实力,也通过行业对话明确了 “从原型到量产” 的关键路径。对于人形机器人的电子研发工程师而言,ADI 的磁耦合触觉传感器、ADMT4000 多圈传感器、TMC9660 驱控芯片等产品提供了可落地的技术方案,而其 “物理智能 + AI” 的融合思路,更为未来技术创新指明了方向。

在会后专家和媒体还集体参观了国家地方共建具身智能机器人创新中心。大家感受到,随着本土产业链协同深化,人形机器人有望加速突破技术瓶颈,在工业、服务、康养等领域逐步释放价值。(完)
发布评论请先 登录
瑞为技术即将亮相第三届中国具身智能与人形机器人产业大会
优必选再次领衔三项具身智能人形机器人国家标准正式获批
我国首个人形机器人与具身智能标准体系发布,灵境智源参与编制
具身智能交流会
复合机器人产业加速落地:技术突破驱动百亿市场,智能制造迎来新质生产力
前瞻布局具身智能新赛道,欧菲光发布人形机器人全视觉方案

共绘具身智能未来,ADI携手产业伙伴举行人形机器人媒体分享会

ADI借助NVIDIA Jetson Thor平台加速人形机器人研发进程
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
人形机器人运动会秀出科技新高度,模拟芯片助力具身智能发展

ADI人形机器人的“感觉神经 + 电力神经元”核心芯片方案盘点
松山湖中国IC峰会圆桌论坛:具身智慧机器人的产业化落地有多难?

具身智能时代来临,灵途科技助力人形机器人“感知升级”



评论