 ADI如何重塑人形机器人运动核心
ADI如何重塑人形机器人运动核心

在具身智能领域,人形机器人无疑是最值得期待的产品类别,有着更高的市场热度和更大的发展潜力。然而,要释放人形机器人的市场潜力,研发企业仍需攻克一系列挑战,涉及定位、感知、连接、控制、电源管理等多个维度。本文将聚焦于其核心的高精度驱动与实时控制技术,展示ADI如何提供从指尖到关节的全栈解决方案,赋能机器人实现更卓越的运动性能。
灵巧手全集成伺服电机驱控方案
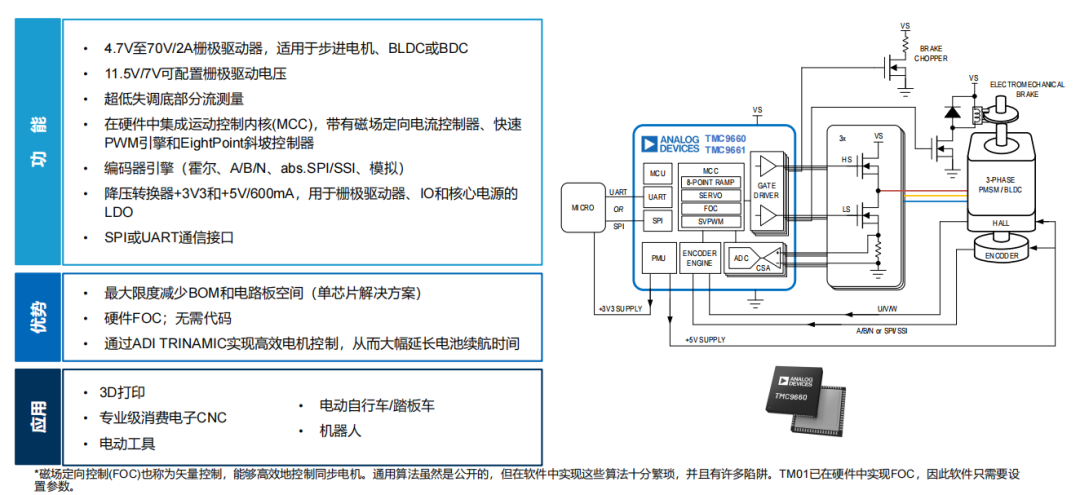
机器人的灵巧手是其与物理世界进行复杂交互的关键,其多自由度、高集成度的特性对电机驱动控制方案提出了极高要求:既要体积小巧,又要能精确控制多个微型电机,同时简化布线和系统复杂度。对此,ADI Trinamic灵巧手集成驱动控制方案提供了革命性的解决方案。
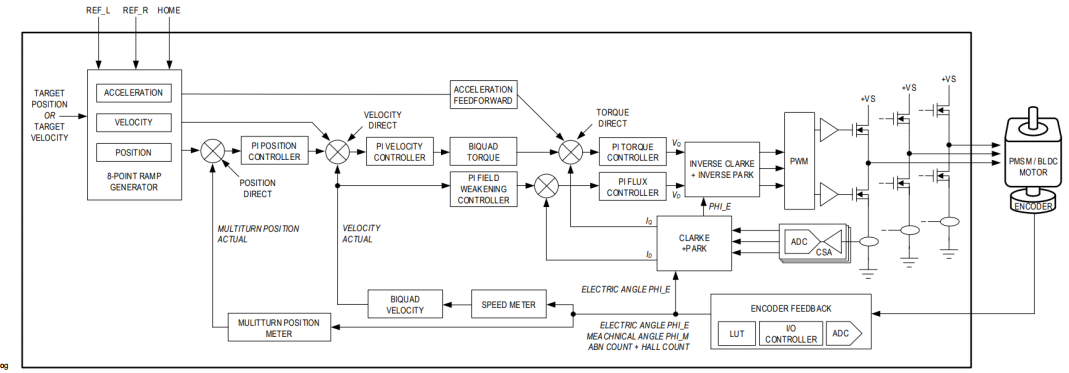
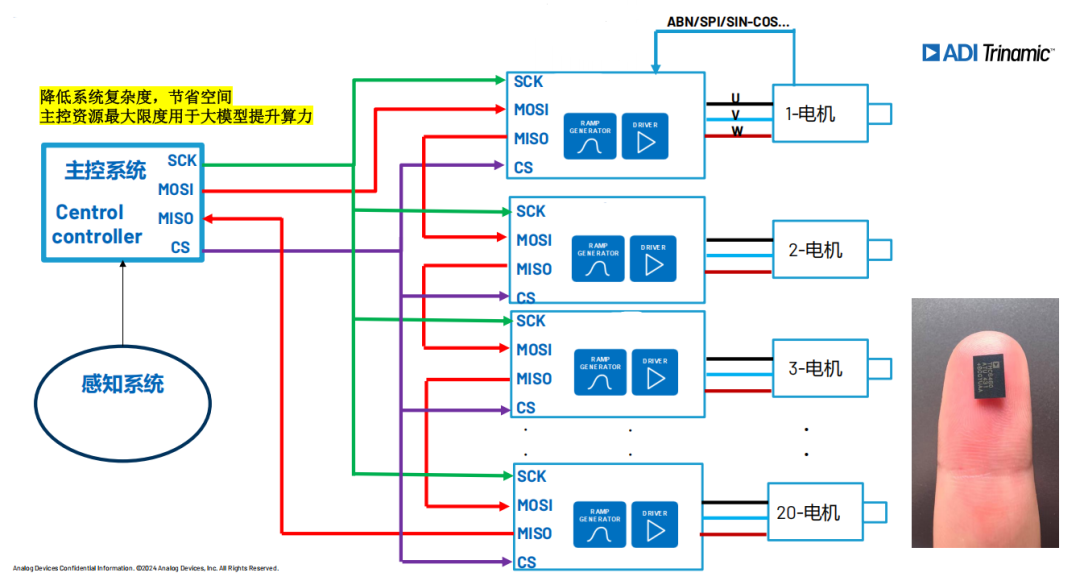
这是一款全集成的36V智能FOC伺服驱动控制芯片,支持PMSM/BLDC及有刷伺服电机。其内部集成了完整的无损电流检测、位置/速度/力矩闭环控制以及高达200kHz的PWM频率,非常适合控制低电感空心杯电机。通过SPI菊花链方式,仅需少量引线即可级联控制多达数十个芯片。这不仅极大降低了系统布线的复杂度、节省了宝贵的PCB空间,还将运动控制任务从主控MCU中卸载,使主控资源能最大限度地用于大模型运算等高级AI任务,提升机器人整体算力。
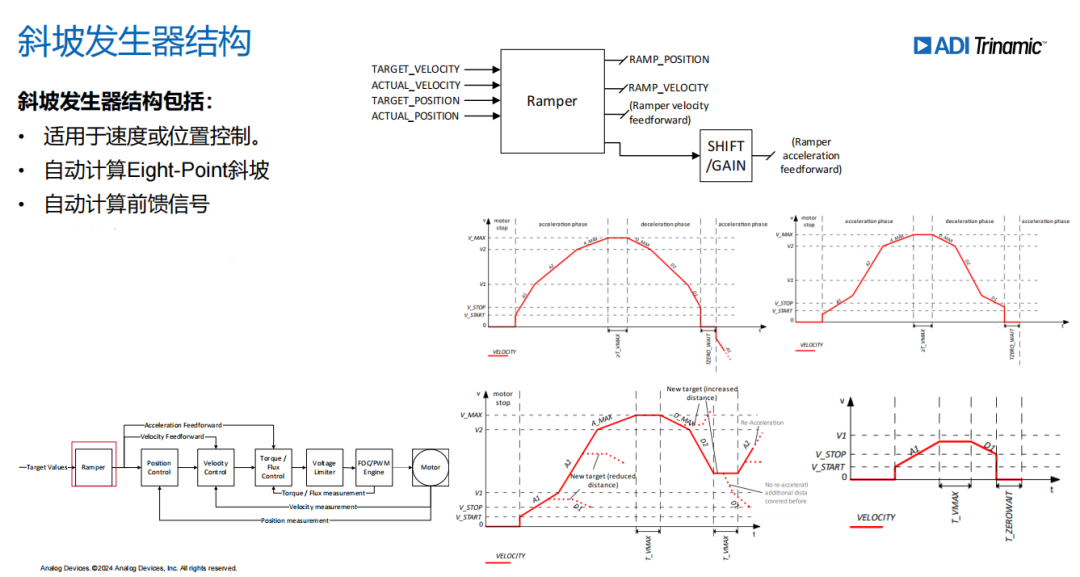
内置硬件FOC引擎,开发者无需编写复杂的FOC算法代码,即可实现电机的高效率、平稳静音及快速动态响应控制。其集成的8点加减速轨迹曲线运动控制EightPoint Motion Controller能减少运动抖动,实现平滑的加减速控制。
关节伺服电机高集成驱控方案
伺服关节是机器人的力量之源和运动之枢,其性能直接决定了机器人的负载能力、运动精度和动态响应。ADI Trinamic为不同功率等级和集成需求的伺服关节提供多样化的解决方案。
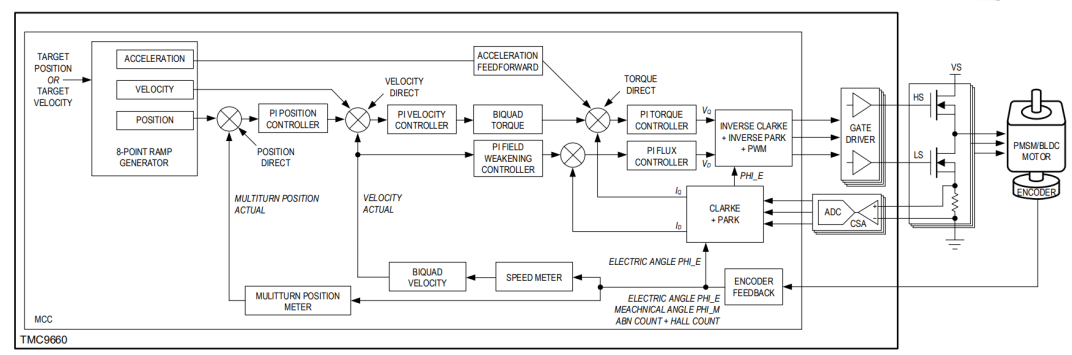
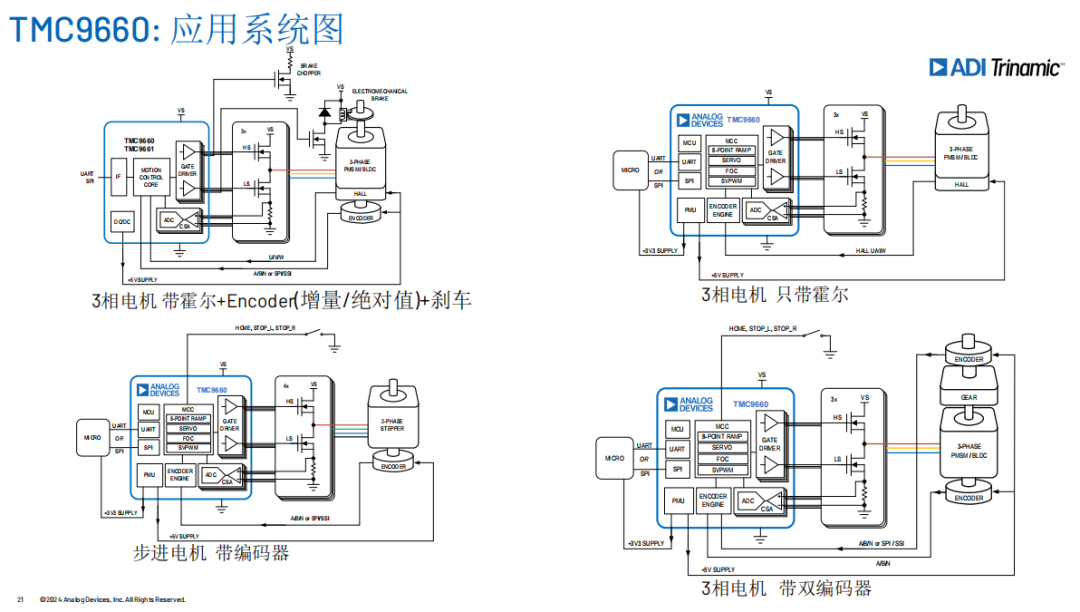
高集成单片伺服驱控芯片TMC9660
该芯片集成了MCU、伺服三环控制(位置、速度、电流)、70V/2A智能栅极驱动器(GDRV)、运放、LDOs及Buck转换器。开发者仅需外置功率MOSFET即可构成完整的伺服驱动单元。同样内置硬件FOC,无需繁琐的软件算法开发。MCC支持高达100kHz的伺服环路控制及8点Ramp轨迹发生器,确保高效、精准的运动控制。
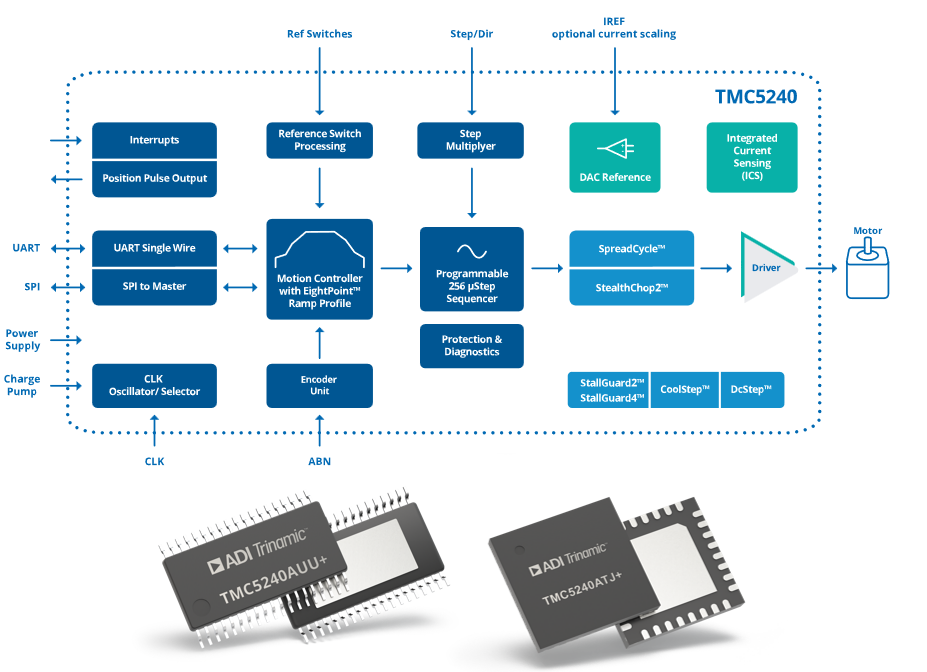
高性能步进电机驱动器TMC5240
TMC5240是一款智能高性能步进电机控制器和同样集成”八点”加减速规划的运动控制芯片, 具有串行通信接口(SPI,UART)和广泛的诊断能力。结合了一个灵活的, 优化的抑制抖动斜坡发生器用于自动定位,采用行业最先进的步进电机驱动技术,该驱动基于256微步细分内置分度器和完全集成的 36V、2.1A(IRMS)、峰值3.0A、H桥(每个H桥的最大输出电流为IMAX=5.0AMAX,超过5A会保护)以及非耗散集成电流传感器 (ICS)。精密的stealthChop2斩波器确保绝对无噪音运行,同时具有最高效率和最佳电机转矩,静音模式到高速度模式的切换,无抖动。
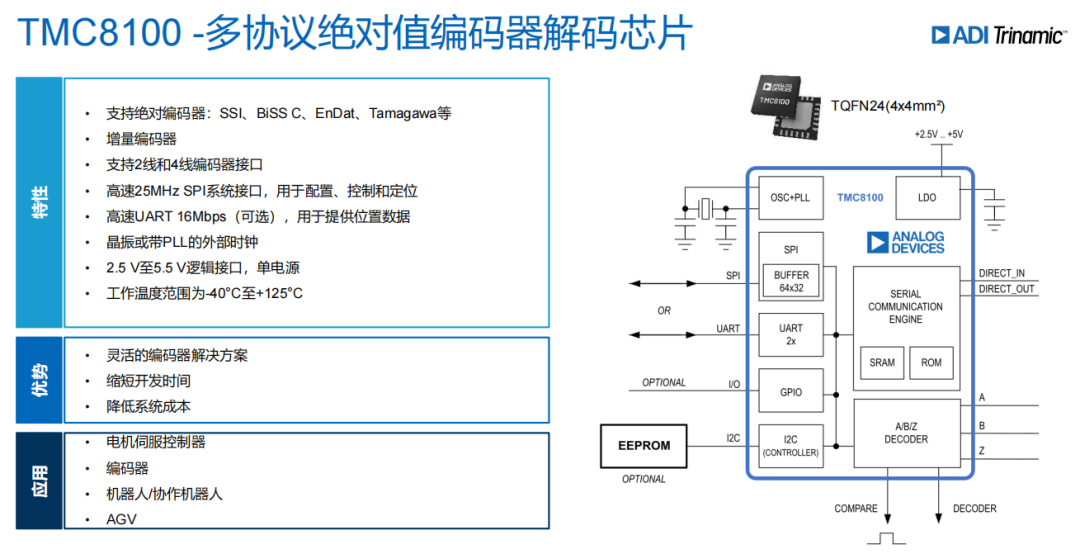
多协议绝对值编码器解码芯片TMC8100
TMC8100支持SSI、BiSS C、EnDat、Tamagawa等多种主流绝对值编码器协议,以及增量编码器接口。能够通过SPI或高速UART与主控制器通信,为伺服关节提供精确、可靠的位置反馈,是实现高精度机器人运动控制的关键一环。它常与TMC6460或TMC9660等驱动芯片配合使用,处理复杂的编码器信号。
智能伺服电机刹车/电磁阀驱动方案
除了核心的旋转关节,机器人系统中还包含大量的电磁阀和电磁刹车。对这些部件的高效、智能驱动同样重要。
智能串行通讯螺线管/电磁阀/直流电机驱动器MAX22216/MAX22217
这两款产品(MAX22216为1.7Arms,MAX22217为0.55Arms)提供多通道独立的半桥驱动,支持电压驱动(VDR)和电流驱动(CDR)控制模式。电流驱动模式能克服线圈电阻变化和输入电压波动带来的影响,实现更精确的力控制,同时节省功耗、减少电磁阀磨损。
同时,具备ON/OFF状态检测、温度估测、开路负载检测等诊断功能,能够通过监测电流变化自动检测电磁阀柱塞的动作完成(END_HIT_AUTO),从而在最佳时间点从冲击电流(Hit Current)切换到保持电流(Hold Current),进一步优化能效并提升系统响应速度。
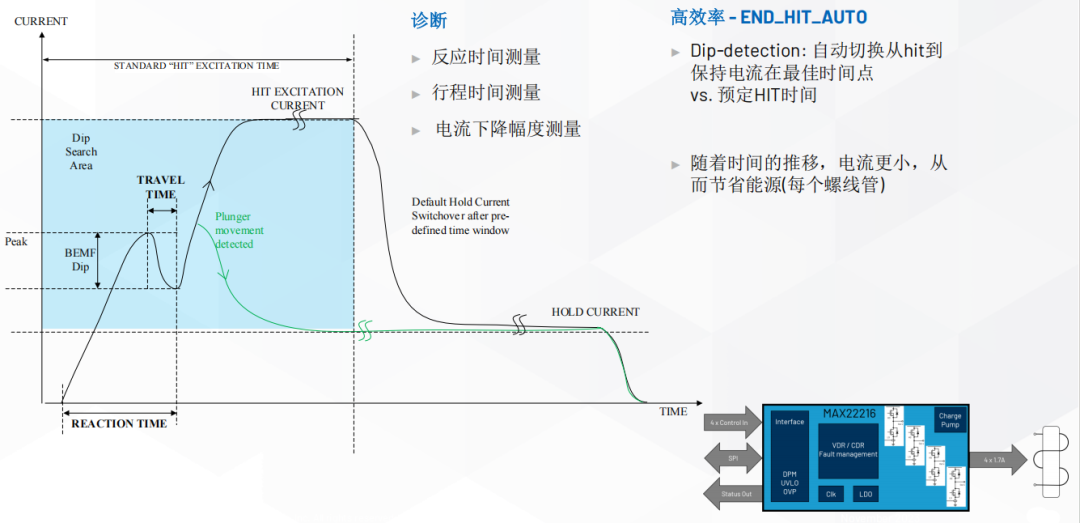
柱塞检测
-
ADI
+关注
关注
150文章
46086浏览量
270501 -
伺服电机
+关注
关注
88文章
2165浏览量
60841 -
控制芯片
+关注
关注
2文章
561浏览量
41005 -
人形机器人
+关注
关注
7文章
881浏览量
18275
原文标题:赋能高精度驱动与实时控制,ADI如何重塑人形机器人运动核心
文章出处:【微信号:analog_devices,微信公众号:analog_devices】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
伺服电动缸在人形机器人中的应用
《电子发烧友电子设计周报》聚焦硬科技领域核心价值 第13期:2025.05.26--2025.05.30
《电子发烧友电子设计周报》聚焦硬科技领域核心价值 第14期:2025.06.2--2025.06.6
《电子发烧友电子设计周报》聚焦硬科技领域核心价值 第16期:2025.06.16--2025.06.20
《电子发烧友电子设计周报》聚焦硬科技领域核心价值 第17期:2025.06.23--2025.06.27
推荐!蓝牙心率运动手环/MTK定位电话手表/人形街舞机器人开发文档资料
【开发教程1】人形街舞机器人-套件检测教程
【教程1】人形街舞机器人-套件检测教程
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
EtherCAT科普系列(4):EtherCAT技术在人形机器人灵巧手领域应用






 工商网监
工商网监
评论