 伺服电机与伺服驱动详解
伺服电机与伺服驱动详解

伺服电机与伺服驱动系统作为现代工业自动化的核心部件,其高精度、快速响应和稳定控制的特性使其在机器人、数控机床、精密仪器等领域发挥着不可替代的作用。本文将从工作原理、系统构成、关键技术、应用场景及发展趋势五个维度展开详细解析,帮助读者全面理解这一技术体系的精髓。

一、伺服系统的基本工作原理
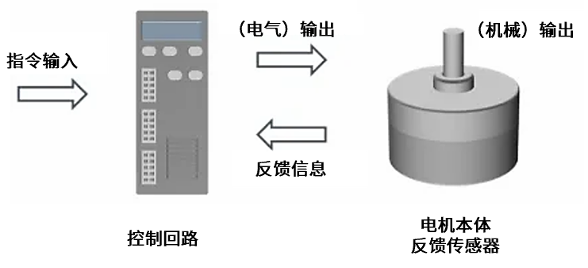
伺服电机本质上是一种能够实现精确位置、速度或转矩控制的电动机。其工作原理基于闭环控制理论:通过安装在电机轴端的编码器或旋转变压器实时反馈转子位置信息,与控制器发出的指令信号进行比较后,由驱动器计算出误差值并调整输出电流,最终使电机输出与指令保持动态一致。这种闭环调节机制可将位置误差控制在±1个脉冲以内,甚至达到亚微米级精度。
交流伺服电机采用永磁同步电机(PMSM)或感应电机(IM)结构,其中永磁同步电机凭借高功率密度、低惯量等优势占据主流市场。其转子采用钕铁硼永磁体,定子绕组通入由驱动器生成的三相正弦波电流,通过控制电流频率和相位实现精准的磁场定向控制(FOC)。典型的3000rpm伺服电机转速波动可控制在±0.1%以内,转矩脉动小于额定值的2%。
二、伺服驱动系统的核心构成
完整的伺服系统包含三大核心组件:
1. 伺服驱动器:作为系统的"大脑",采用32位DSP或ARM处理器实现高速运算。现代驱动器集成多种控制模式(位置/速度/转矩),支持EtherCAT、Profinet等工业总线协议。关键技术包括:
●空间矢量脉宽调制(SVPWM)技术,提升电压利用率15%以上。
●前馈补偿算法降低跟踪误差。
2. 伺服电机:按电源类型可分为交流(AC)和直流(DC)伺服电机。交流伺服电机采用全封闭结构,防护等级可达IP67,连续转矩密度超过3.5Nm/kg。特殊设计的低齿槽转矩转子使低速平稳性优于0.1rpm。
3. 反馈装置:23位绝对值编码器成为行业新标准,分辨率达到838万脉冲/转。某些高端型号采用双编码器配置(电机端+负载端),可实现全闭环控制。
三、关键技术突破点
现代伺服系统的发展主要围绕以下技术展开:
●智能控制算法:模型预测控制(MPC)、自适应模糊PID等先进算法使响应时间缩短至1ms以内。
●集成化设计:驱动与电机一体化产品体积缩小40%,如安川Σ-7系列。
●振动抑制技术:基于FFT分析的在线惯量辨识可自动抑制机械谐振。
●能效优化:再生制动能量回收效率达85%,较传统方案节能30%。
特别值得关注的是EtherCAT总线技术的普及,使伺服系统的同步精度达到纳秒级,多轴协同控制时位置偏差不超过±1微米。某品牌六关节机器人采用该技术后,重复定位精度达到±0.02mm。
四、典型应用场景分析
1. 工业机器人领域:六轴协作机器人要求伺服系统具备0.001°的角度控制精度,且需要实现重力补偿、碰撞检测等特殊功能。某型号SCARA机器人采用直接驱动伺服电机后,循环时间缩短至0.3秒。
2. 数控机床:五轴联动加工中心对伺服系统提出苛刻要求:进给轴定位精度0.005mm,主轴在6000rpm时径向跳动≤0.002mm。采用直线电机+光栅尺全闭环方案可满足需求。
3. 半导体设备:晶圆搬运机械手需要纳米级定位,特殊设计的真空伺服电机可在10^-6Pa环境下稳定工作,配合气浮导轨实现±5nm重复定位精度。
4. 新能源装备:光伏串焊机采用直线伺服系统,加速度达5G,每小时可完成3600次精确定位。
五、未来技术演进方向
随着工业4.0的深入发展,伺服系统正呈现以下发展趋势:
1. 数字化与网络化:TSN(时间敏感网络)技术将控制周期压缩至100μs,5G无线伺服系统开始试点应用。
2. AI深度集成:基于深度学习的参数自整定系统可自动识别负载特性,调试时间缩短90%。
3. 新材料应用:碳纤维转子使转速突破30000rpm,高温超导绕组有望提升功率密度50%。
4. 模块化设计:可拆卸式功率模块使驱动器维修时间从4小时降至15分钟。
据行业预测,到2028年全球伺服系统市场规模将突破200亿美元,其中协作机器人、医疗设备等新兴领域将保持18%以上的年复合增长率。国产伺服品牌通过突破核心算法和关键器件(如IGBT、编码器芯片),市场份额已从2015年的15%提升至目前的35%。
需要特别指出的是,伺服系统的选型需综合考虑刚性匹配、惯量比(建议控制在3-5倍)、过载能力等参数。实际应用中,约60%的故障源于机械安装问题(如同轴度偏差),因此专业调试至关重要。随着数字孪生技术的普及,虚拟调试正在成为降低现场调试风险的有效手段。
审核编辑 黄宇
-
伺服电机
+关注
关注
88文章
2200浏览量
61551 -
伺服驱动
+关注
关注
4文章
103浏览量
18342
发布评论请先 登录
三菱伺服电机的编码器引脚的定义

行星齿轮减速机如何匹配伺服电机转速?

伺服电机和伺服减速机如何配选的
伺服基础知识详解

伺服电机增益详解

派克Parker防爆伺服电机与普通伺服电机的区别


舵机与伺服电机的区别是什么?
伺服电机的三种制动方式有什么区别?

人形机器人伺服电机驱动器新动力:高性能电容器的协同作用

伺服电机中的回原点方式

什么是伺服电机编码器?作用/关键技术/选型等一起看看吧!




评论