 高精度地图对于自动驾驶来说真的很有必要吗?
高精度地图对于自动驾驶来说真的很有必要吗?

[首发于智驾最前沿微信公众号]随着自动驾驶技术的逐步落地,曾经高度依赖的高精度地图似乎不再火热,行业的注意点更多转移到了端到端大模型、AI等前沿领域。那高精度地图在自动驾驶中到底承担的是什么角色?它有哪些不可替代的作用?

什么是“高精度地图”,它要解决什么问题?
高精度地图不是我们手机里常用的那种导航地图,它的设计目标是为自动驾驶系统提供“机器能用的、可精确定位和决策的先验世界模型”。这类地图要把道路从“人能看懂”的层面,提升到“车可以用来定位、预测和规划”的层面。
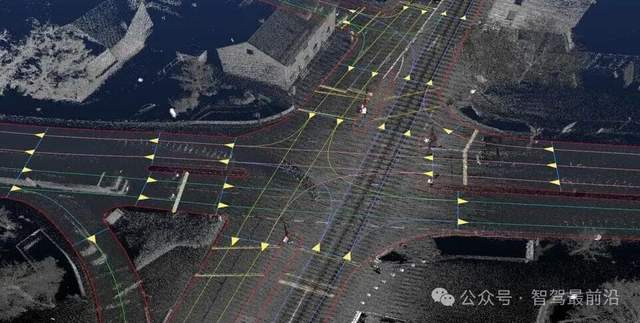
高精度地图的坐标精度要达到米以下、通常是厘米级;语义信息要细到车道线、停止线、人行横道、交通信号灯与其对应的受控车道、路侧护栏、路沿、坡度、曲率等;同时要把道路网络抽象成带语义的拓扑图,说明哪些车道可以直行、左转、掉头,哪里有强制停车、哪里有限速、线型变化等。
高精度地图不仅包含几何(3D点云、线、面),还包含“语义”与“规则”两类信息,这些信息是自动驾驶在传感器观测受限时的重要先验。高精度地图是几何层(精确的三维重建)、语义层(车道、标志、信号等)、拓扑/连通性层(lanegraph)、本地化锚点(用于精确定位)的混合体,只有将这些信息进行融合,才可以确保自动驾驶汽车“看”到更远的路。

高精度地图应该包含哪些“要素”?
高精度地图需要把一条道路的“规则”和“长相”都要“写”清楚,其需要的要素远比普通导航地图多得多。首先是用于精确定位的几何基准,三维点云或精确的道路中心线与车道边界,可以提供厘米级的位置参考,帮助车辆把传感器感知的物体挂到地图坐标系上,从而实现稳定的位姿估计与多帧融合。

还有就是车道语义,像是车道编号、车道宽度、车道功能(转弯车道、直行车道、公交专用等)、车道连通性(相邻车道能否并入/换道)、以及合并点、分叉点的拓扑关系等信息,这对轨迹预测和行为决策至关重要。
再有就是如停止线、人行横道位置、斑马线延伸、减速带、路缘、路沿、护栏、中央分隔带位置、受限停车区等静态交通设施信息。信号化信息也要映射到车道上,哪盏交通灯控制哪条车道、信号灯的位置(不是仅仅在路口附近标注一个“红绿灯”),以及可能的信号相位和时序(如果有的话)。
除了上面说的这些,高精度地图还会包含限速、道路曲率与坡度、路面材料、夜间照明、GPS可见性指数、常见遮挡区域(比如树荫会干扰传感器)等道路属性。
当然,有些高精度地图还包含“历史行为层”或“统计层”,用于记录某个路段常见行人/非机动车行为、车流分布或拥堵模式,这些对于规划器做风险评估也很有用。Waymo、Mobileye、HERE等把这些要素做成既能用于定位又能用于规划的多层结构。

与传统导航地图的本质区别在哪里?
把高精度地图和我们常用的“地图”(例如手机导航、百度/高德地图或OpenStreetMap)放在一起比较,差别不仅仅是“精度更高”那么简单。传统地图的目标是解决人类驾驶者的“从A到B怎么走”的问题,它注重道路走向、路名、路口类型、POI(兴趣点)、大致限速和路网连通性,通常精度在米级或更粗,数据更新以周/月为单位,且很多语义信息是为人呈现的文字与图标。

高精度地图的目标是“让车知道前方几米内的每个东西在什么地方、如何影响决策”,因此它关注的是局部几厘米内的几何细节与机器可读的语义关系。传统地图可以告诉你“前方右转进入X路”,但高精度地图要告诉自动驾驶“在前方12.4米处,右侧车道在0.3米处转为右转专用车道,停止线在13.2米处,与之对应的信号灯位于左侧1.1米高,且该信号相位控制直行和右转两个车道”。
此外,传统地图通常为平面表示,而高精度地图常常包含3D点云、曲率与高程信息,这些对车辆动力学与纵横向控制很关键。高精度地图的语义精细化和本地化锚点是其与普通地图的核心差别。

与“实时生成式地图”的区别与互补
近几年行业内还有另一个热门话题是“能不能在车上实时生成地图,把高精度地图的工作都交给车载SLAM/感知?”实时生成式地图(或称为在线地图、局部地图、即时SLAM)是把车辆的传感器输出在行驶过程中拼接成即时的地图或语义图,并用于定位与规划。
高精度地图与实时生成式地图其实有明显的差别,“范围与一致性”就是其中一个,车载实时地图所覆盖的是车辆所在的局部区域,并依赖当前观测,它能很好应对临时障碍(比如施工、临时停车)和动态目标,但在全局一致性、长期静态几何精度和语义完整性上往往不如离线制作的高精度地图。离线高精度地图通过多车次、多时刻的点云与影像融合,利用后处理来消除噪声,生成更稳定、更完整的三维几何和语义标签;而在线方法在传感器噪声、遮挡和天气影响下,容易出现位姿漂移、语义错判或图谱碎片化的问题。实时地图的优势在于低成本和对动态变化的适应性,它不需要昂贵的外部测绘车队或集中化更新流程,能马上感知路上的临时变化。
其实在实时生成式地图与高精度地图之间,最佳路径不是“二选一”的问题,而是把二者当作互补,用离线高精度地图提供高可信度的先验(尤其在遮挡或远距情况),同时用在线生成的地图或感知来修正实时高精度地图的短期变化,甚至把在线观测回传到云端做增量更新,形成“半实时”的地图生态。这种混合方案也是很多厂商关注的焦点。

要不要放弃高精度地图?
近年行业里出现了两种极端的路线,一派把高精度地图当作关键组件,认为它能显著提升定位、感知鲁棒性和规划质量;另一派在产品层面宣称尽量少用或不依赖传统意义上的高精度地图,转而依靠“纯视觉/深度学习+海量行驶数据”来完成定位与决策。
之所以出现这两种路线,本质上还是从“成本与可扩展性”以及“性能与安全冗余”这两个方面考虑。支持放弃高精度地图的论据多集中在可扩展性,制作并保持全球范围内的高精度地图的成本极高,地图会频繁过时(施工、临时标识改变、道路改造等),如果能把这些信息完全交给车辆通过学习和在线感知实时判断,就能显著降低部署成本并提高可扩展速度。
反对放弃的人则指出,当前传感器感知在很多极端情况(强光、夜间、雨雾、长期遮挡)下仍然不够可靠,而高精度地图提供的“先验”可以弥补传感器的盲区并提高安全余量。
其实从实际应用上来说,“完全放弃高精度地图”这种说法并不完全准确,未来或许会朝着多种策略并存并朝着“更轻量、更动态的地图”的方向演进。比如把高精度地图的信息拆成“核心的长期不变信息”和“容易变动的动态信息”,只把长期信息做成离线高可信度的层,把易变信息交给在线感知与云端快速更新;还可以采用众包/车队采集与增量更新机制,把用户车或服务车作为测绘前端来降低测绘成本;更可以发展更紧凑的地图表示(例如语义图+拓扑图,而非完整的大体素点云),以便在带宽受限的情况下下发关键先验;还可以探索将生成模型与图学习用于地图补全或自动合成(Waymo的HDMapGen就是把地图建模为可生成的结构化表示以提高合成与仿真能力)。这些方向的改变意味着高精度地图的“形态”会变化,但在可预见的中短期内,其“先验价值”在多种自动驾驶场景下仍然无法被纯粹依赖传感器的方案完全替代,尤其是对安全冗余要求高的服务(像城市内的Robotaxi服务),高精度地图的重要性则更为显著。

未来高精度地图会如何发展?
未来,高精度地图或会经历从“静态、重量级”向“多层次、动态、可生成功能化地图”转变。离线高可信度的几何/拓扑层会继续存在,用于保证定位基线和仿真验证;在线生成与众包更新会成为常态,用以处理施工、事故和临时变化;云端会承担更复杂的合并、纠错与版本管理工作;同时,生成式模型与图神经网络可能在地图补全、语义推断与地图压缩方面提供新工具。用一句简短的话来概括就是,地图不会被“抛弃”,而是会被“重新设计”以适应规模化部署的经济与安全要求。
审核编辑 黄宇
-
自动驾驶
+关注
关注
794文章
14988浏览量
181506 -
高精度地图
+关注
关注
1文章
21浏览量
3186
发布评论请先 登录
为什么自动驾驶方案不再强调地图了?

如何构建适合自动驾驶的世界模型?

为什么“中间表达”对于自动驾驶来说非常重要?

自动驾驶中的“无图”真的不需要地图吗?

自动驾驶BEV Camera数据采集系统:高精度时间同步解决方案

硬件在环仿真(HIL)对于自动驾驶来说有何意义?

没有地图,纯视觉自动驾驶就只能摸瞎吗?

置信度验证对于自动驾驶来说重要吗?

高程数据在自动驾驶中有什么作用?
麦斯塔MST8011AI-21系列晶振:自动驾驶的高精度“节拍器”
从“有图”到“无图”再到“轻图”,自动驾驶地图选择为何这么折腾?

实时生成式地图对于自动驾驶来说有什么作用?

如何制作一张自动驾驶高精度地图?

自动驾驶中常提的高精度地图是个啥?有何审查要求?

为什么仿真对于自动驾驶来说非常重要?




评论