 自动驾驶中常提的高精度地图是个啥?有何审查要求?
自动驾驶中常提的高精度地图是个啥?有何审查要求?

[首发于智驾最前沿微信公众号]在自动驾驶系统中,高精度地图(High-DefinitionMap,简称HDMap)是实现车辆精准定位、环境感知和路径规划的核心数据支撑。与普通导航地图相比,高精度地图不仅在空间分辨率和数据丰富度上有质的飞跃,还在数据处理与安全管理方面提出了更严格的规范。那高精度地图到底是个啥?是否有什么具体需求?

高精度地图,顾名思义,是一种面向自动驾驶的高分辨率、结构化道路环境数据集。它不仅包含道路的几何轮廓(如车道边缘、路缘石位置、路面宽度等),还融入了丰富的语义信息(如车道拓扑关系、交通标志语义、信号灯位置与配时)、动态要素(如实时施工区域、临时交通管制区)和精确的三维坐标系。依托全球导航卫星系统(GNSS)、视觉里程计、惯性测量单元(IMU)等定位手段,对车辆在道路上的位置进行亚米乃至厘米级的精度修正,从而为自动驾驶系统提供可靠的“道路底图”,帮助车辆在复杂路况下实现精确定位、感知融合和路径决策。
高精度地图的主要内容可以大致分为以下几类。首先是基础几何信息,包括道路中心线、车道边界、路缘石、路口区域等,这部分信息构成了自动驾驶车辆在车道级别上进行定位和行驶的几何框架。其次是语义标注,如车道线类型(实线、虚线、导流线等)、车道功能(直行车道、转弯车道、辅道等)、道路元素(交通标志、交通信号灯、路面文本标识)等,这些语义要素直接服务于感知模块与决策模块,使车辆能够理解道路规则与行驶意图。三维地形与高度信息也常被引入高精度地图,以帮助车辆在有坡度或弯道的情况下进行平稳控制。此外还有动态事件层,包括道路施工、临时封闭区域、事故警示等实时或准实时更新的事件标记,为自动驾驶系统提供最新的道路状态预警。
普通导航地图(NavigationMap)主要面向人类驾驶员及基本导航需求,它侧重于路径规划和路网覆盖,通常以米级分辨率提供道路连通性、点位兴趣(POI)、道路等级与限速等信息,满足“从A点到B点”的规划需求。而高精度地图则以厘米级或更高的空间精度勾勒车道级别细节,并在数据模型上更具结构化和多层次语义。简单来说,普通导航地图相当于给出城市的道路走向与主要标志建筑,而高精度地图则为每条车道、每个交通设施乃至路面纹理都做了详尽的标注,为自动驾驶算法提供了“看得见的”世界。
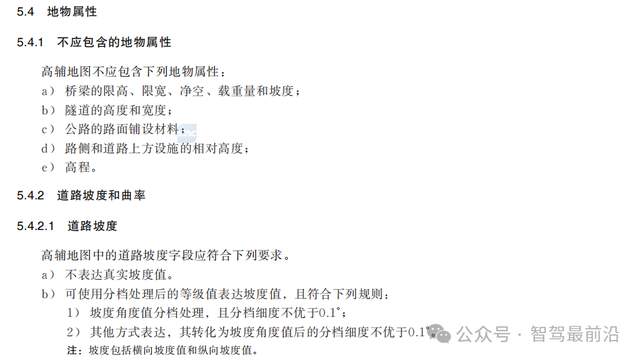
面对如此精细的数据,高精度地图的生产与使用也带来了更高的安全与保密挑战。如桥梁净空、隧道高度、公路铺装材料等过于精确的地物属性,一旦泄露,可能被用于不法勘探或军事用途。其实为了保证高精度地图的技术可靠性、安全合规性和数据可审查性,国家标准化管理委员会已于2024年9月发布了《高级辅助驾驶地图审查要求》(GB/T 44489—2024),并于2025年1月起正式实施。《高级辅助驾驶地图审查要求》(GB/T 44489—2024)对地图生产单位资质、数据范围、涉密处理、送审材料和审查内容等方面做出了系统规范。
《高级辅助驾驶地图审查要求》明确规定在地物属性层面禁止包含桥梁限高、隧道高度、路面材料等敏感信息,仅允许以分档等级方式表达道路坡度和曲率,且坡度分档精度不得优于0.1°,曲率分档精度不得优于10⁻⁵m⁻¹,以兼顾地图应用效能与信息安全。
《高级辅助驾驶地图审查要求》还对送审主体的资质提出了硬性门槛:只有取得“导航电子地图制作测绘资质”的单位,才能够将高精度地图提交审查。这一规定确保了地图生产方需具备国家认可的专业测绘能力与安全管理体系,避免无资质机构随意制作地图带来的技术瑕疵或安全隐患。

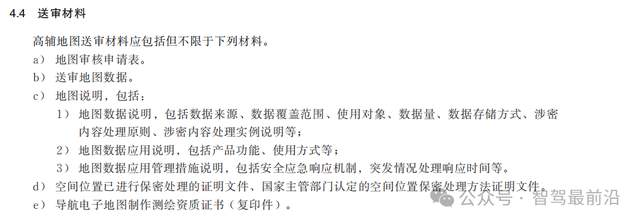
送审材料的完备性也在标准中得到了详细规定。地图生产单位需提交包括地图审核申请表、送审地图数据、地图数据说明(涵盖数据来源、覆盖范围、存储方式及涉密处理实例)、地图应用说明与管理措施(尤其是安全应急响应机制与处理时限)、空间保密处理证明文件以及测绘资质证书等多项资料。如此详尽的材料准备,一方面便于审查机构从多角度评估地图质量与管理水平,另一方面也督促地图企业在生产与管理流程中建立完善的安全与应急响应体系。
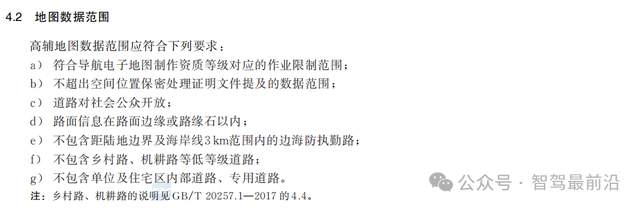
在地图数据范围方面,标准要求数据覆盖需严格与资质等级对应的作业区域保持一致,且不得超出经空间位置保密处理批准的范围。同时仅限于对社会公众开放的道路,不得包含乡村路、机耕路、单位内部道路或边海防执勤路等低等级或涉密道路。这样做不仅防止了私有或敏感道路信息泄露,也保证了地图数据与自动驾驶应用场景的高度契合。
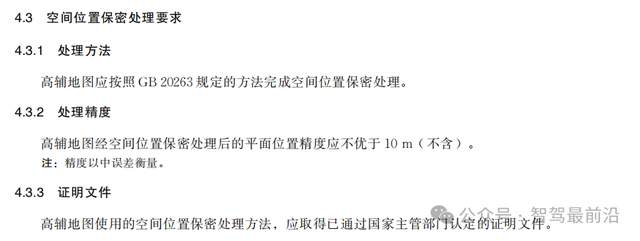
空间位置保密处理是标准中的另一大重点。所有送审高精度地图必须按照《导航电子地图安全处理技术基本要求》GB 20263的方法进行保密处理,且处理后的平面位置误差中误差不优于10米。此外,地图企业需提供国家主管部门认定的保密处理方法证明文档,以让审查机构验证处理流程的正规性和安全性。这一环节既保护了国家敏感目标,又确保公开发布的地图在定位精度上仍能满足自动驾驶运行的基本要求。
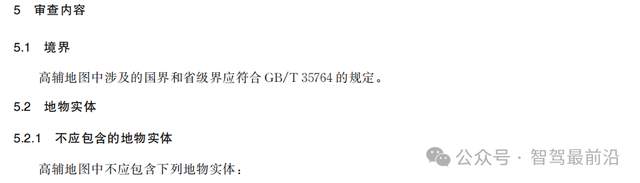
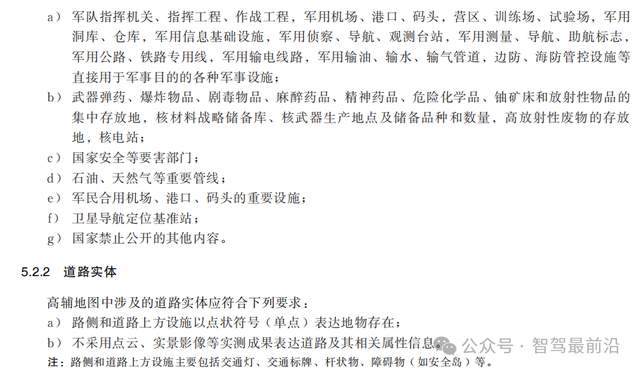
进入实质审查阶段,标准从“境界”“地物实体”“地名或兴趣点名称”“地物属性”四大方面对地图要素进行逐条核查。在“境界”方面,要求国界、省界等行政区划符号必须符合《公开地图内容表示要求》GB/T 35764的规定,保证地图在行政表达上的规范一致。对于“地物实体”,标准严禁包含各类军事设施、危险化学品存储地、核电站、重要管线、卫星基准站等敏感目标,并且要求所有路侧与上方设施仅用单点符号表示,不得嵌入点云或实景影像。如此既杜绝了高精度测量数据被滥用的风险,也优化了地图数据模型的轻量化。
在“地名或兴趣点名称”审查中,任何与禁止列举的敏感实体对应的地名都必须剔除,其余名称则需符合公开地图内容表示规范,确保地图信息的合法性与一致性。地物属性方面,前文所述的坡度与曲率分档规则,以及禁止包含净空、限高、路面材料等过细测量数据的要求,共同构成了一套兼顾功能性与安全性的规范体系。
可以说,《高级辅助驾驶地图审查要求》的出台,是在自动驾驶产业快速发展的背景下,对高精度地图这一关键基础数据提出的全面安全加固。它既从技术层面规范了数据精度与结构化要求,也从管理层面强化了资质审核与保密处理,构建了从生产到应用的闭环合规机制。随着未来车联网(V2X)协同、高精度云端地图平台和实时地图更新技术的不断成熟,这一标准还将持续迭代,为中国自动驾驶产业夯实更加安全、可靠的底层支撑。
审核编辑 黄宇
-
自动驾驶
+关注
关注
795文章
15056浏览量
181991
发布评论请先 登录
为什么自动驾驶方案不再强调地图了?

自动驾驶中常提的“深度估计”是个啥?

自动驾驶中常提的模仿学习是什么?
自动驾驶中常提的“强化学习”是个啥?

自动驾驶中常提的“专家数据”是个啥?

自动驾驶中常提的ODD是个啥?

自动驾驶中常提的“全栈”是个啥?有必要“全栈”吗?

自动驾驶中常提的硬件在环是个啥?
自动驾驶中常提的RTK是个啥?

自动驾驶中常提的惯性导航系统是个啥?可以不用吗?

实时生成式地图对于自动驾驶来说有什么作用?

如何制作一张自动驾驶高精度地图?

自动驾驶中常提的“时序”是个啥?有啥作用?
自动驾驶中常提的世界模型是个啥?




评论