 Zivid3D相机安装使用教程
Zivid3D相机安装使用教程

Zivid3D相机安装使用教程
安装软件
① 下载好zivid studio 安装包后,运行安装包


如果第一次安装需要勾选Camera drivers项,安装摄像头驱动
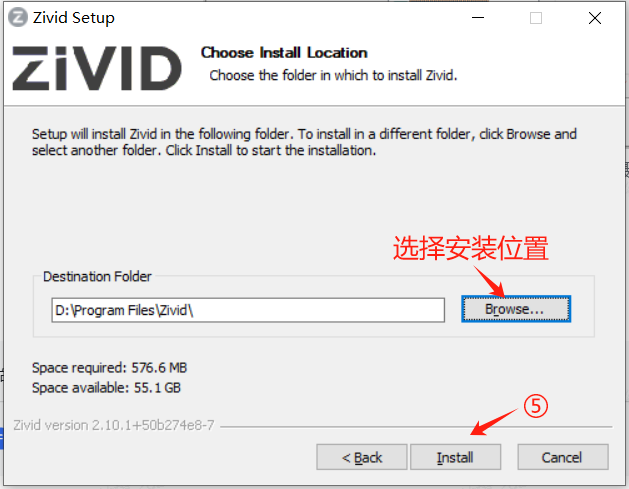
自定义安装路径
等待安装完成
第一次安装TeliCamSDK (x64) 驱动程序时,您可能需要重新启动计算机。如果提示重新启动,请接受。
连接软件
介绍:Zivid Studio是Zivid软件开发套件 (SDK) 的图形用户界面 (GUI)。用户可以用它来探索Zivid相机的功能和捕获高清3D点云。
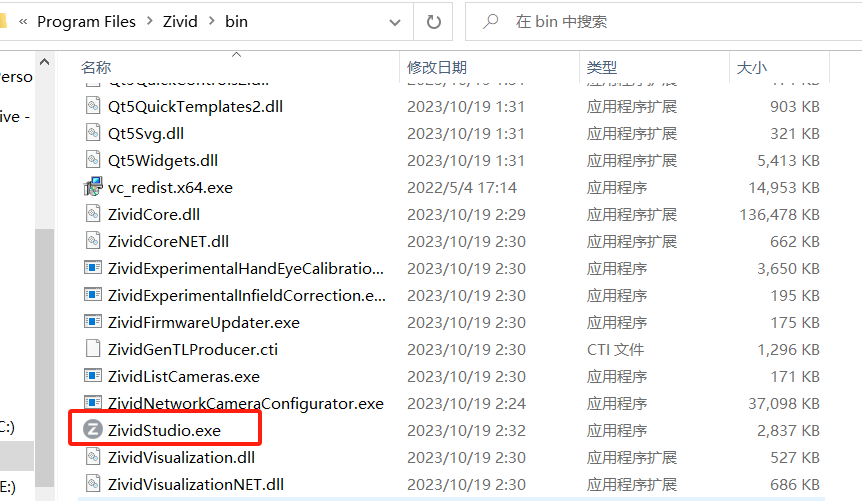
找到电脑中软件安装位置,打开bin文件夹,找到zivid studio打开即可进入到软件图形化界面。
2.更改IP(Zivid One+ 除外)

使用软件
1.软件界面,以及按钮作用
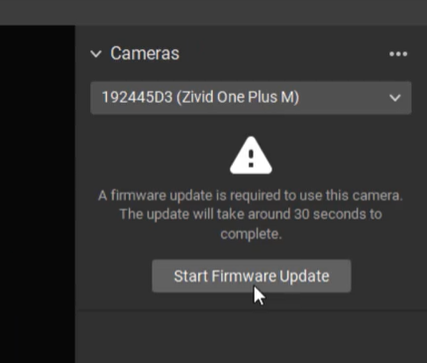
每个 SDK 版本都与相机固件相匹配,SDK 会确保相机运行兼容的固件。当 Zivid Studio 连接 到相机时,它会检查相机是否有匹配的固件。如果固件不匹配,系统会提示您更新相机上的固件。
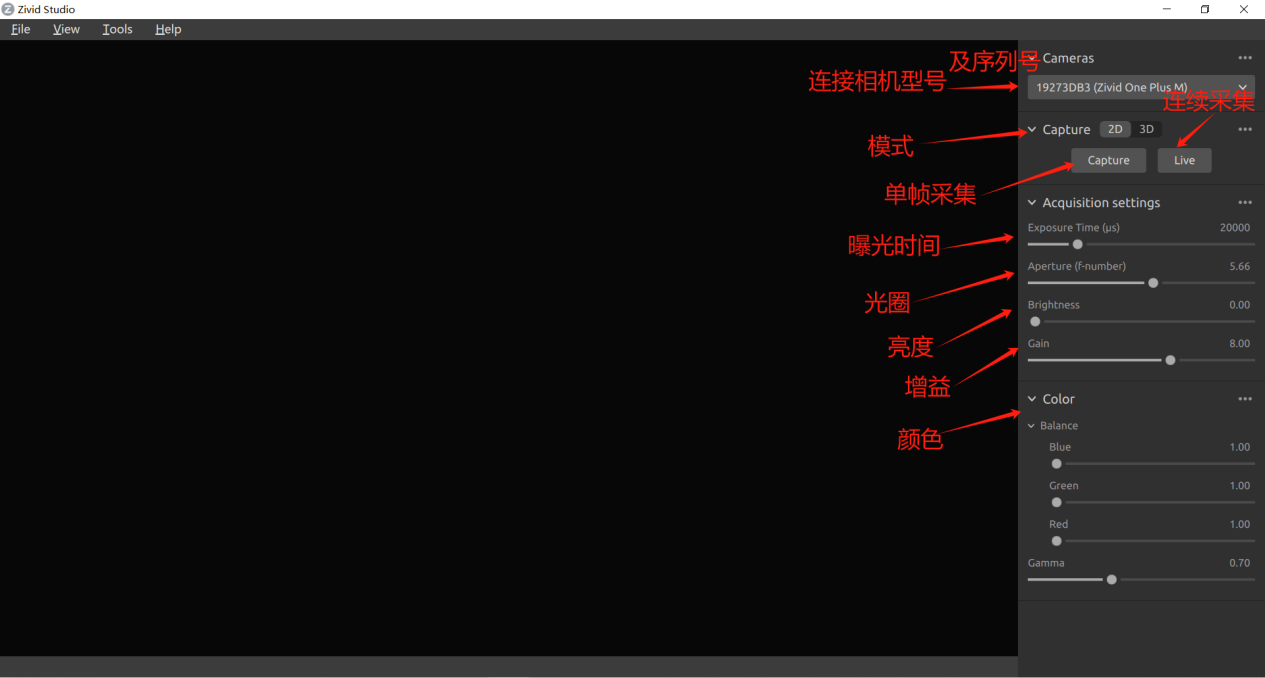
基于2D模式下
通过Zivid studio可以:
捕获点云
可视化点云、彩色图像 (2D)、深度图 (Z 轴)、SNR(信噪比)图和法线图。
分析和评估 3D 数据质量
为您的目标对象和场景确定正确的设置和过滤器
将点云和彩色图像保存至磁盘
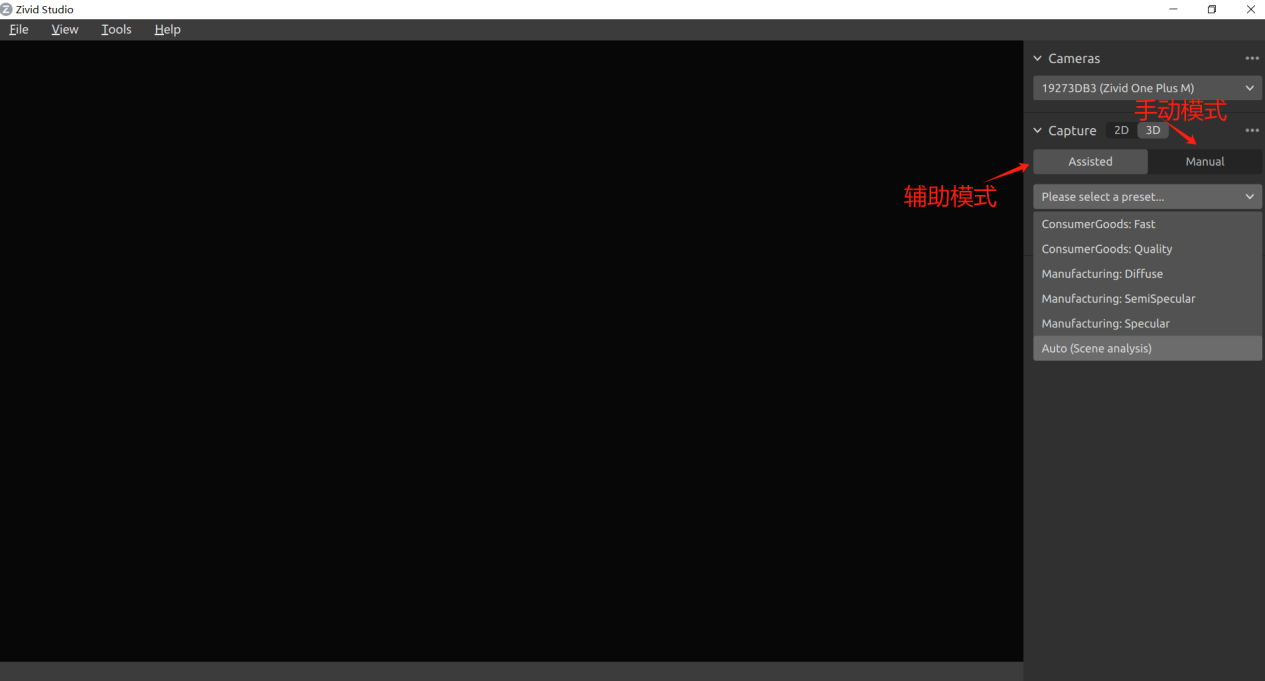
基于3D模式下
Assisted Mode(辅助模式)
Presets(预设值)
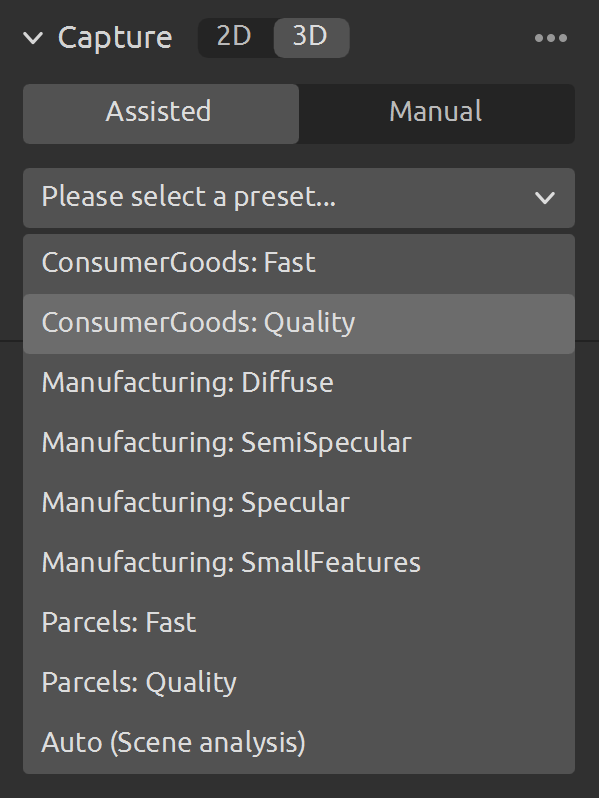
Presets(预设值)是ZividSDK的一部分,是一系列预先调整好的设置。这些预设值旨在简化相机参数的调整,并且是捕获助手的替代方法。Capture Assistant会尝试根据时间预算优化任何场景的曝光设置,而预设值则是针对以下类别而专门调整的曝光设置:
Consumer Goods(消费品)
Manufacturing(制造业)
Parcels(包裹)
Inspection(检测)
在每个类别中,您可以找到各种不同的预设值。这些是由场景复杂性、工作距离或其中对象的典型材料属性类型区别而来的。不同的相机型号根据它们的常见应用也有不同的预设值。
自动(场景分析)Auto(Scene analysis):
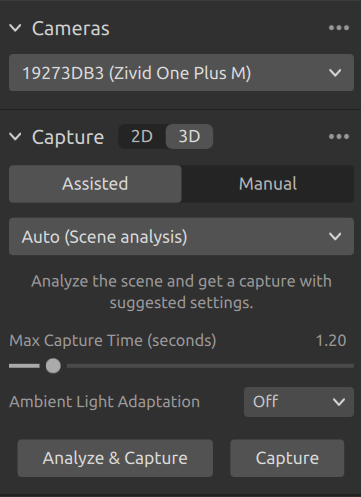
设定最大捕获时间 Max Capyure Time(seconds)
点击分析及捕获 Analyze & Capture: 这会触发相机分析场景并输出覆盖场景中尽可能多的动态范围所需的相机设置.
捕获按钮 Capture:会直接使用辅助捕获建议的设置执行捕获,无需额外的场景分析。
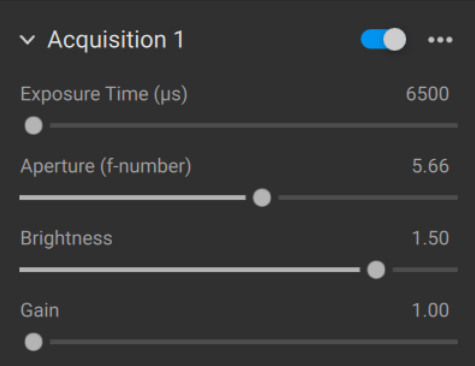
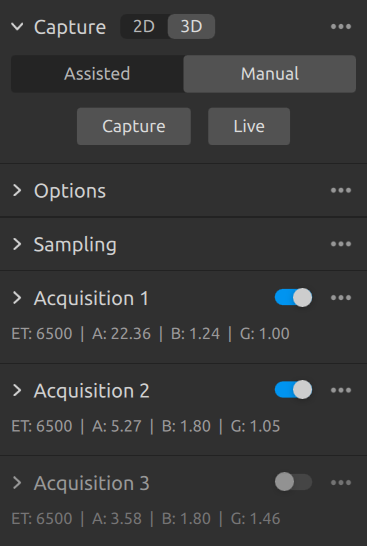
Manual Mode(手动模式)
在手动模式下需手动配置所有设置和过滤器。
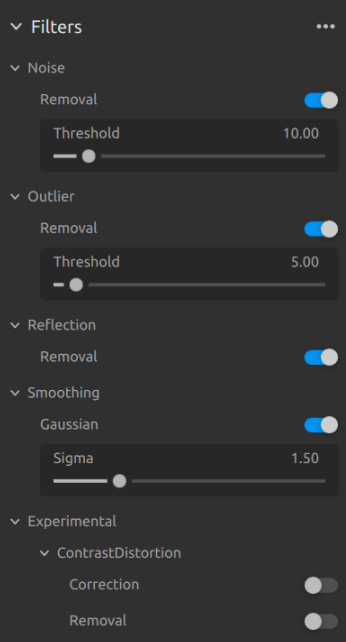
Filters (过滤器)

Capture(捕获) 和 Live(实时)模式
点击 Capture 按钮将使用指定设置来捕获单次采集或多次采集HDR,并显示图像。
点击 Live 按钮将触发连续捕获,使您能够实时查看场景。
对于高动态范围场景,需要使用多次采集合成HDR。在此模式下,相机每次采集都会捕获一张图像。捕获的每张图像都使用为特定采集配置的设置。然后,这些图像会自动合并为一帧高质量的 HDR 帧。
单击 Capture 按钮使用指定的采集设置来捕获图像,未勾选的采集将不被执行。
HDR
对于高动态范围场景,需要使用多次采集合成 HDR。在此模式下,相机每次采集都会捕获一张图像。捕获的每张图像都使用为特定采集配置的设置。然后,这些图像会自动合并为一帧高质量的 HDR 帧。
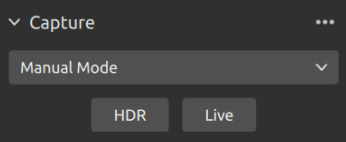
选择“Manual Mode”后,您就可以点击“Add Acquisition”(添加采集) 按钮添加其他采集项。默认情况下,添加的每个新采集项都使用上一个采集项的设置。如果您需要克隆某个采集项,您可以单击该采集项旁边的三个点,然后点击“Clone”(克隆)。使用同一菜单重置采集设置或删除单个采集项。使用复选框禁用或启用采集项。单击“HDR”按钮捕获具有指定采集设置的图像;未选中的采集项将被忽略
可以使用 Assisted 获取建议的设置,然后切换到 Manual 手动微调这些设置。
可用视图
Zivid Studio GUI 底部有五个可用视图的选项。这些视图可显示以下功能:
点云
颜色图像
深度图
SNR 图
法线图

您可以通过以下操作以在视图之间进行切换
使用键盘快捷键 1 到 5
通过单击 GUI 底部的缩略图进行手动更改视图
从左上角的下拉菜单中选择视图
Point Cloud (点云图)
捕获或加载 ZDF 文件后,此视图将显示该场景的点云。
• 使用鼠标左键旋转点云。
• 使用鼠标右键进行平移。
• 可通过滚动鼠标滚轮或拖动鼠标中键(如果可用)放大或缩小图像。
在此视图打开和关闭颜色 (“C”& “D”) 及网格 (“M”),有助于评估点云质量。点的大小也可以通过左上角的下拉菜单进行调整。例如,调整点大小有助于检查重要的纹理区域。
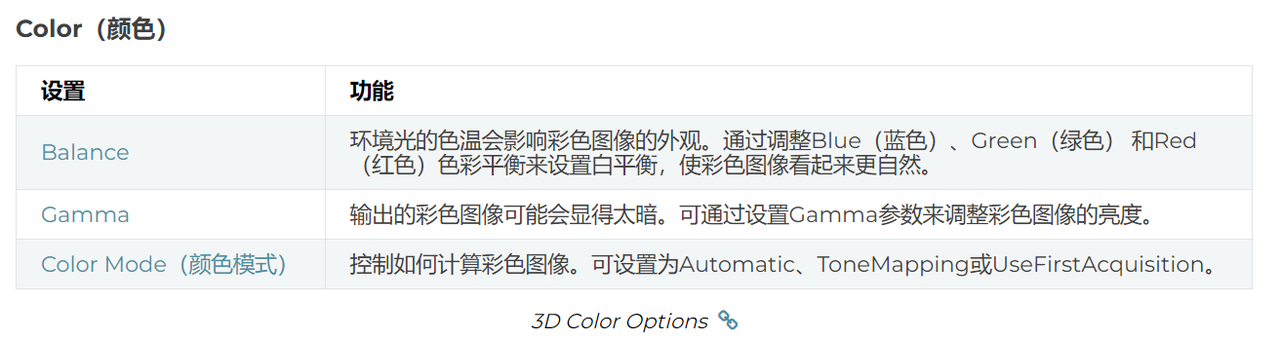
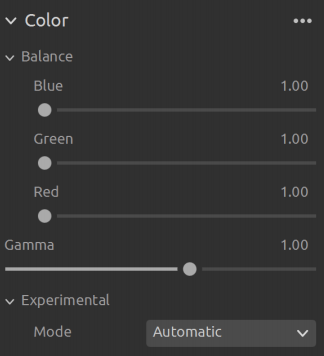
Color (颜色图)
捕获或加载 ZDF 文件后,此视图将显示该场景的彩色 2D 图像。
• 将鼠标指针放在图像中的像素上,以获取图像坐标、RGB 和 SNR 值。像素值显示在窗口左下角的状态栏中。
• 可通过滚动鼠标滚轮或拖动鼠标中键(如果可用)放大或缩小图像。
• 使用鼠标左键平移点云。
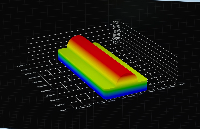
Depth (深度图)
捕获或加载 ZDF 文件后,此视图将显示场景的深度图像。
• 将鼠标指针放在图像中的像素上,可以获取图像坐标、XYZ 和 SNR 值。像素值显示在窗口左下角的状态栏中。
• 可使用视图左上角的下拉菜单设定 Z 的范围。
• 使用缩放和平移功能的方式与颜色视图中所述的方式相同。
颜色标尺表征了从相机到成像对象表面沿 z 轴的距离变化。
Signal-to-Noise-Ratio (信噪比图)
此视图将显示捕获后或加载 ZDF 文件后的场景的 SNR 图。
• 将鼠标指针放置在图像中的像素上,以获取图像坐标和 SNR 值。像素值显示在窗口左下角的状态栏中。
• 您可以使用与颜色视图中所述的相同方法来使用缩放和平移功能。
色标表示了 SNR 值的变化情况。当像素与色标上端区域的颜色一致时,表示这个点有着很强的信号质量。当像素与色标下端区域的颜色一致时,表示点受噪声的影响更多一些。因此,这些点具有更多的不确定性。
Normals (法线图)
此视图将显示捕获后或加载 ZDF 文件后的场景的法线图。
• 将鼠标指针放置在图像中的像素上,以获取图像坐标、法线坐标和 SNR 值。像素值显示
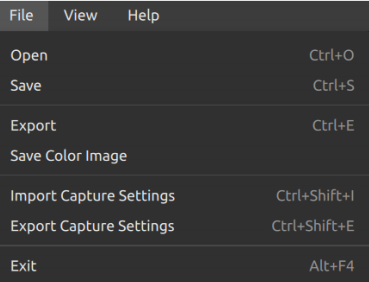
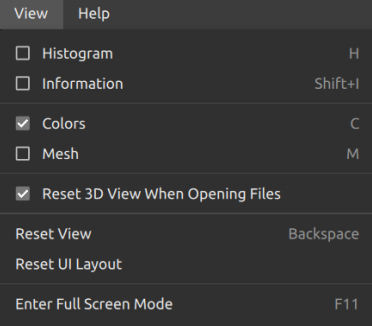
Toolbar (工具栏)
工具栏位于 Zivid Studio GUI 顶部。它由数个下拉菜单组成,用于处理文件、控制 GUI 以及获取有关Zivid 软件的信息。


关于昊艾智能
昊艾智能专注于提供3D机器视觉整体解决方案,助力中国智能制造水平的提升与产业升级!
目前,我们拥有一批高素质的3D机器视觉应用工程师与算法研发工程师,具有完备的机器视觉项目评估能力与底层核心算法开发能力。我们的3D机器视觉整体解决方案在动力电池、汽车行业、消费电子、白色家电、轨交检测等多个领域成功落地实施,积累了丰富的3D机器视觉项目应用与软件开发经验!
昊艾智能主营产品:3D机器视觉整体解决方案,包括结构光3D相机、激光线扫相机、SICK 3D线激光轮廓传感器、TOF相机,高精度3D测量系统、视觉引导定位系统、无序抓取系统等,可实现平面度、高度差、位置度测量、凹凸缺陷检测、胶路检测、视觉引导机器人打磨、视觉引导机器人工件定位装配、工件无序抓取等功能。
审核编辑 黄宇
-
3D相机
+关注
关注
0文章
148浏览量
9088
发布评论请先 登录
安装sw32_mbdt_s32k3_1.6.0_d2501.mltbx后,验证安装时会遇到以下错误,如何处理?
2026工业相机选型指南及推荐

3D工业相机晶振落地:时间精度真的不可忽视吗?
奥比中光Gemini 330系列双目3D相机完成NVIDIA Jetson Thor平台全面适配
奥比中光正式推出超小型双目3D相机Gemini 305
工业3D相机常见参数及分类的通用术语解读

iDS iToF Nion 3D相机,开启高性价比3D视觉新纪元!


从3D传感器到立体相机,解锁工业应用新可能

Zivid 2+ R系列工业相机产品介绍
奥比中光发布最新一代3D激光雷达及双目深度相机
3D 工业相机解析:轴向、平面、重复、线性精度到底哪个更重要?
3D工业相机价格是?这种3D工业相机性价比最高

国产品牌的3D工业相机为什么更受欢迎?





评论