 医疗术野新突破:MODBUS转CANOPEN网关打造高性能手术机器人通信骨架
医疗术野新突破:MODBUS转CANOPEN网关打造高性能手术机器人通信骨架

- 项目背景与系统概述
随着精准医疗需求的不断提升,手术机器人作为高端医疗设备的代表,正逐步成为复杂外科手术的重要工具。手术机器人的控制系统对实时性、可靠性与精确度要求极高,任何通信延迟或数据错误都可能直接影响手术效果与患者安全。传统MODBUS协议因其简单易用,在工业领域广泛应用,但在高实时、多节点、复杂交互的医疗机器人场景中显得力不从心。因此,将MODBUS设备接入高性能的CANopen网络,成为提升系统整体通信能力的关键技术路径。
该系统通常由手术控制台、机械臂、影像设备和监控单元等组成,通过集成MODBUS转CANopen网关,使得原本基于MODBUS的从站设备(如电机、传感器等)能够无缝接入以CANopen为主干的实时控制网络中,在确保数据一致性的同时,显著提高响应速度和设备协同能力。

- 通信网络组成
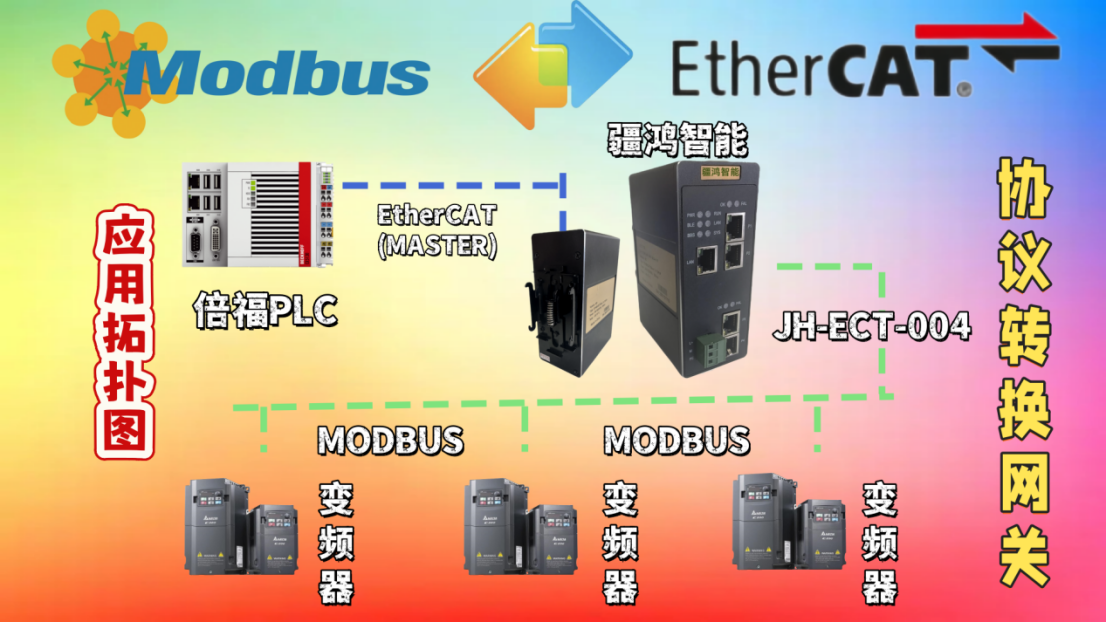
手术机器人的通信网络呈分层分布式结构。最上层为中央控制单元,通常作为CANopen主站;中间通过协议转换网关连接下层的MODBUS从设备;底层则包括各类关节电机、光学传感器、力矩反馈单元等执行与感知设备。
网关在这一架构中处于核心位置,它不仅完成MODBUS RTU/ASCII与CANopen帧格式之间的转换,还实现了协议间的服务映射,如将MODBUS寄存器映射为CANopen对象字典条目,从而在应用层实现数据互通。此外,网关还具备数据缓存、错误隔离和实时日志功能,进一步增强了系统的鲁棒性。
- 接口特性:CANopen主站与从站的角色
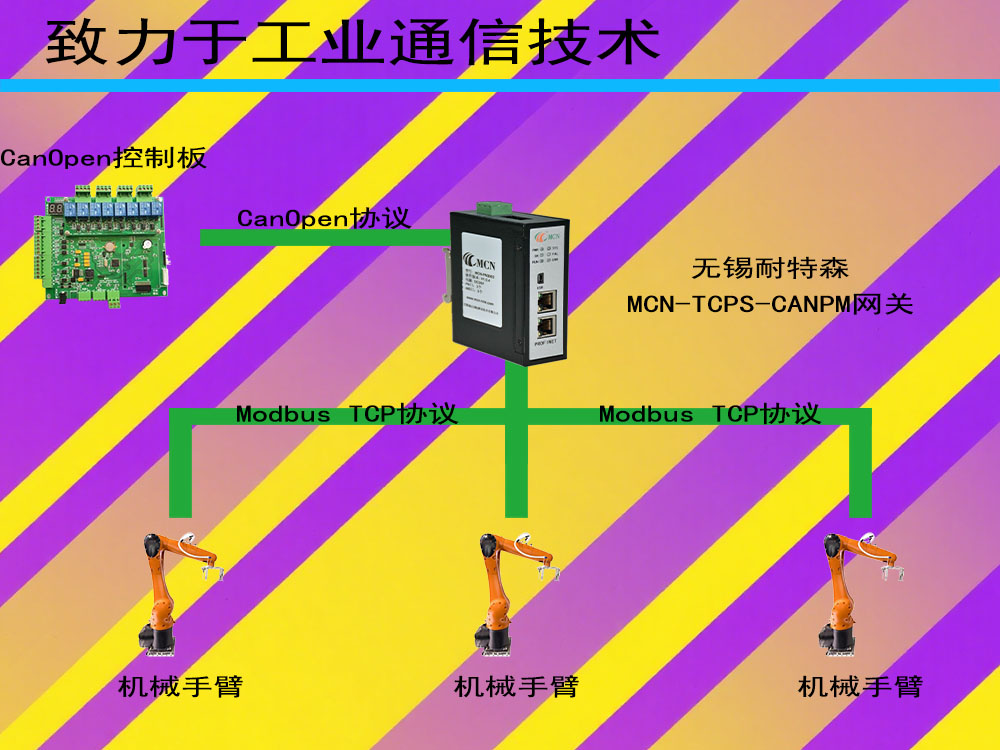
CANopen作为主站时,通常由中央控制器或运动控制卡承担,负责整个网络的初始化、配置和周期性的过程数据对象(PDO)通信。主站通过发送同步帧(SYNC)协调各从站设备的数据收发节奏,保障实时控制类数据如目标位置、电机转矩等能够以极低的抖动进行传输。在手术机器人系统中,主站还需处理紧急事件消息,如某个关节模块异常,系统需在毫秒级时间内响应并进入安全状态。
CANopen从站则通常对应具体的执行单元或智能传感器。它们接收主站发来的控制指令,并实时上传自身状态。这些设备通过对象字典实现参数标准化与访问统一化,支持多种服务数据对象(SDO)进行参数配置与非周期通信,也支持PDO实现高效实时数据交换。而经由网关接入的MODBUS设备,在CANopen网络中仍以从站身份出现,但其通信内容已被网关翻译并整合进CANopen通信框架中。
值得注意的是,由于医疗设备对功能安全的严格要求,该网络通常还需支持CANopen的安全扩展协议(CANopen Safety),或通过冗余网关架构进一步提升可靠性。
- 总结
疆鸿智能MODBUS转CANopen的协议转换方案,为手术机器人这类高要求医疗设备提供了一条平滑而可靠的技术升级路径。它既保留了原有MODBUS设备的资产价值,又充分发挥了CANopen在实时性、可靠性和网络扩展性方面的优势,使得系统在复杂多节点的医疗场景中仍能实现精密控制与高速协同。未来,随着通信协议的进一步融合与边缘网关算力的增强,类似的结构仍将是实现医疗设备系统集成与功能进化的重要支撑,最终为提升手术精准度、保障患者生命安全提供坚实基础。
审核编辑 黄宇
-
机器人
+关注
关注
213文章
31506浏览量
223885 -
MODBUS
+关注
关注
28文章
2532浏览量
83854 -
网关
+关注
关注
9文章
6960浏览量
56598 -
CANopen
+关注
关注
8文章
521浏览量
49878
发布评论请先 登录
EtherNet/IP转CANopen——焊装产线的“协议破壁人”:让机器人听懂焊机

EtherCAT转CANopen网关模块在工业机器人系统中的典型应用案例解析

索尼FCB-EV7520与USB编码板CM2001U重塑医疗术野摄像新生态
强生医疗科技携手NVIDIA推进手术机器人开发
集成异构网络:EtherCAT转MODBUS机器人通信方案
工业机器人如何通过Modbus TCP转CanOpen网关高效通信!
MODBUS/CANOPEN网关:楼宇系统互联,从此无界

研华科技助力真健康穿刺手术机器人亮相
医疗界的“万能转换器耐达讯EtherCAT转RS\\-232“协议互联的秘密武器
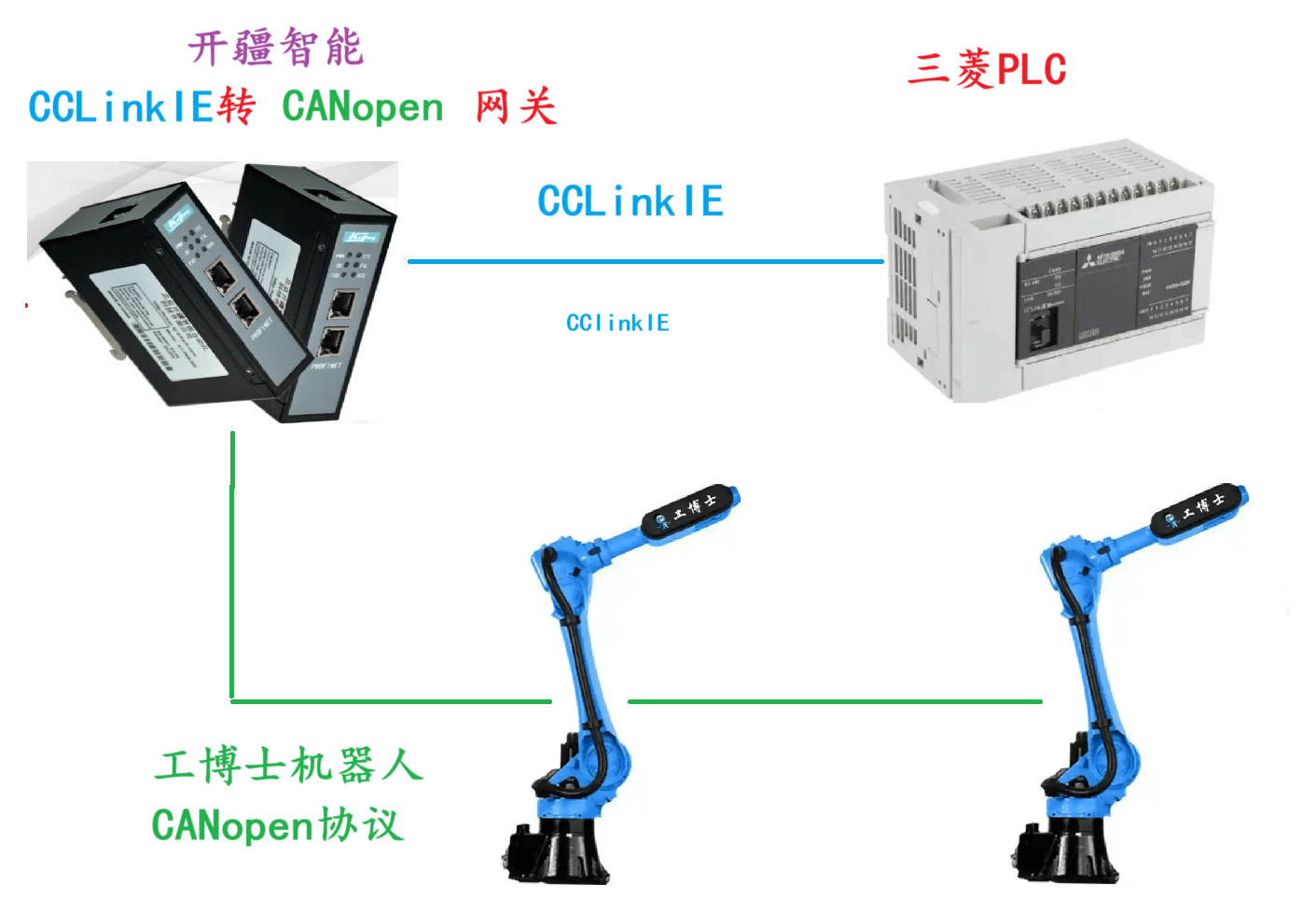
开疆智能CCLinkIE转CANopen网关连接GBS20机器人配置案例
通信小能手,Modbus TCP转Profibus DP网关硬控变送器与PLC通讯方案

跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信

开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例

开疆智能Canopen转Profinet网关连接工博士GBS20机器人配置案例



评论