 EtherCAT转CANopen网关模块在工业机器人系统中的典型应用案例解析
EtherCAT转CANopen网关模块在工业机器人系统中的典型应用案例解析

EtherCAT转CANopen网关模块在工业机器人系统中的典型应用案例解析
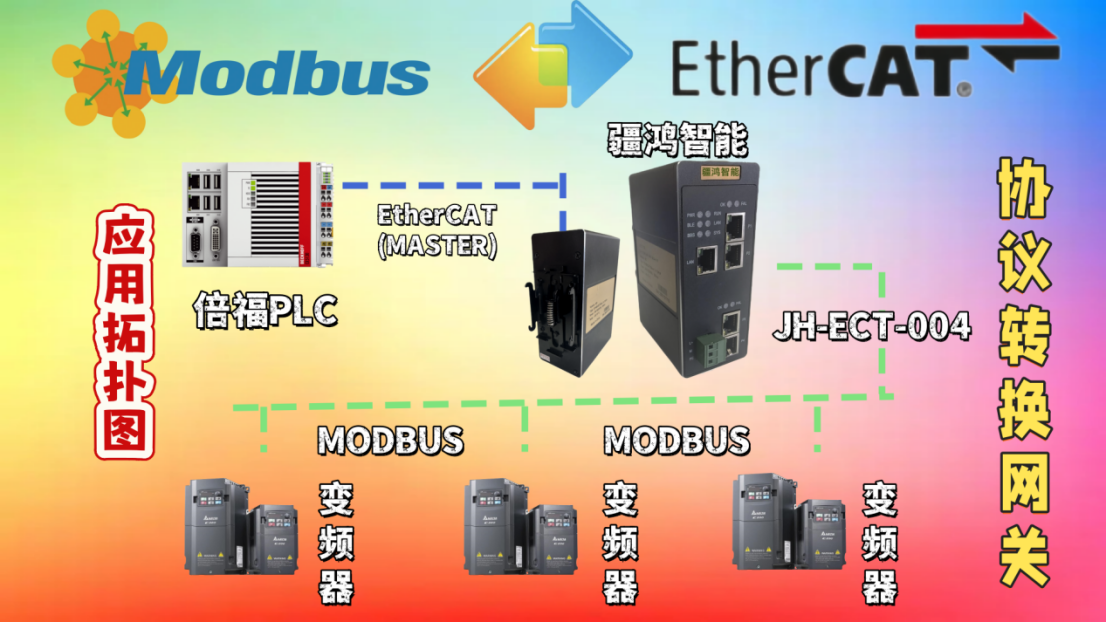
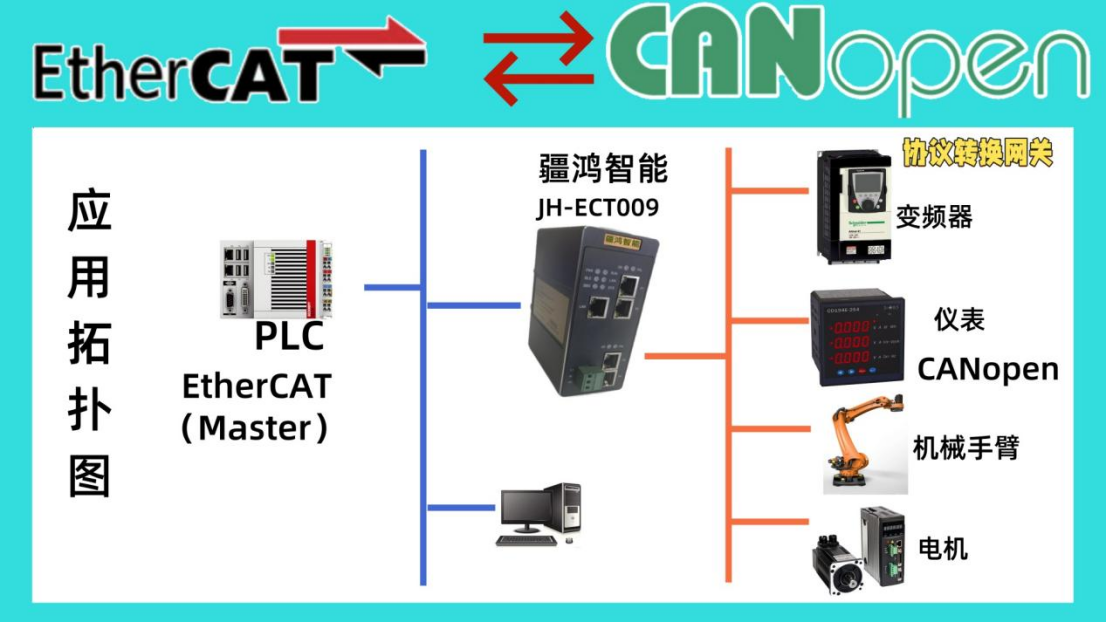
在现代工业自动化产线中,高可靠性的通信与精确的运动控制是保障生产质量与效率的核心要素。某大型制造企业车间采用基于EtherCAT协议的高性能运动控制器主站,以实现对生产设备的实时、高速运动控制。与此同时,车间内大量传感器(如温度、压力、位置等)采用CANopen通信协议,负责采集过程数据,为生产监控与调节提供依据。为实现EtherCAT主站与CANopen从站传感器之间的互联互通,企业选用疆鸿智能JH-ECT009网关,完成EtherCAT至CANopen的协议转换,从而构建统一、高效的工业自动化通信网络。

硬件连接
完成疆鸿智能JH-ECT009网关的EtherCAT端口与运动控制器主站EtherCAT端口的物理链路对接,确保通信线路满足高速实时通信的电气稳定性要求。随后,将网关的CANopen接口接入CANopen从站传感器所挂载的CAN总线网络,须严格校核CAN_H与CAN_L信号极性,并依据现场总线规范正确配置终端匹配电阻。

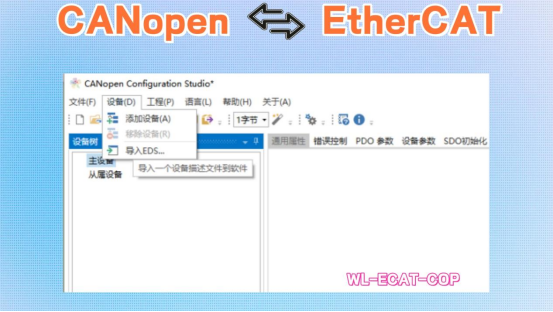
软件配置
利用网关配套的配置软件,对其执行参数化配置。具体包括:设定EtherCAT主站侧通信参数、定义CANopen从站节点地址(Node ID)及总线通信速率等关键参数。配置过程中,应依据实际系统需求对上述参数进行整定与优化,以确保网关能够精确完成EtherCAT与CANopen之间的协议转换与数据映射。
技术参数
JH-ECT009在EtherCAT一侧为EtherCAT从站,在CANopen一侧可以作为CANopen主站。
ESI文件由配置工具自动生成
支持最大的输入字节数为500字节,最大的输出字节为500字节
CANopen支持波特率:10kbit/s, 20kbit/s, 50kbit/s, 100kbit/s, 125kbit/s, 250kbit/s, 500kbit/s, 800kbit/s, 1Mbit/s,其它波特率可以定制
最大连接数:126个从站
接收PDO数量:512
发送PDO数量:512
总结
在工业自动化的未来演进中,随着新型技术的不断涌现,通信协议之间的兼容性与互操作能力将成为系统集成的核心挑战。疆鸿智能JH-ECT009协议转换网关作为异构网络间的关键互联设备,将在多类型工业场景中发挥愈加重要的作用,助力实现现场总线与实时工业以太网的无缝融合,从而推动工业自动化向更高层次的集成化与智能化发展。
审核编辑 黄宇
-
工业机器人
+关注
关注
91文章
3550浏览量
98490 -
CANopen
+关注
关注
8文章
511浏览量
49815 -
ethercat
+关注
关注
20文章
1573浏览量
46049
发布评论请先 登录
EtherCAT转CANopen网关模块:实现倍福与汇川的高效通信桥梁

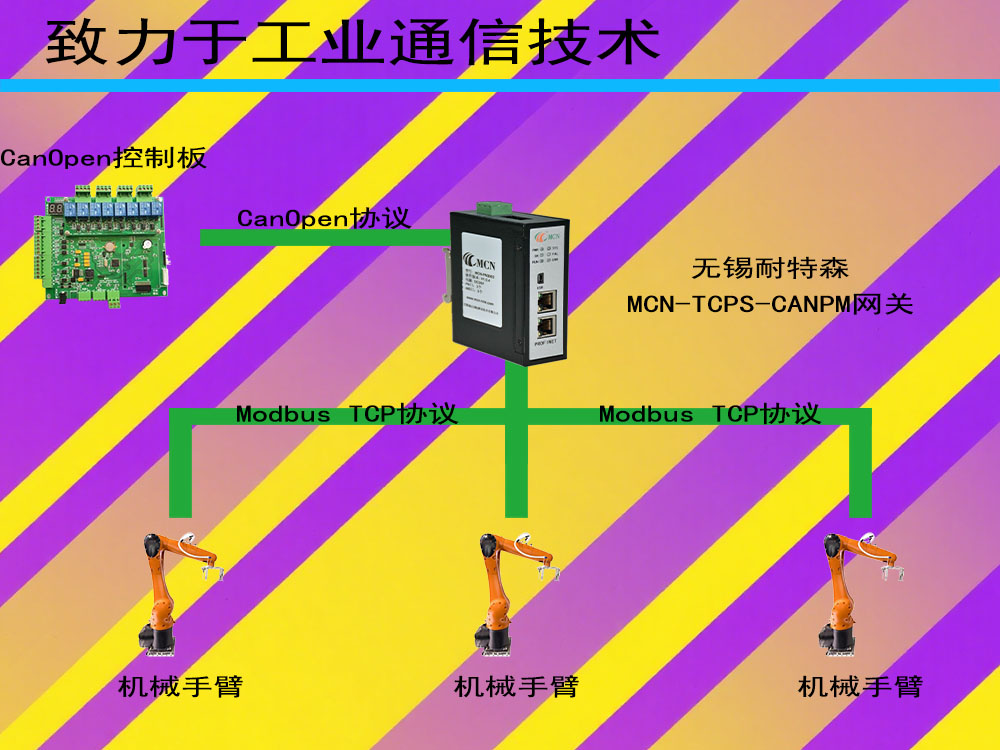
集成异构网络:EtherCAT转MODBUS机器人通信方案
工业机器人如何通过Modbus TCP转CanOpen网关高效通信!
耐达讯CAN转EtherCAT网关,变频器通信升级的“真香”指南
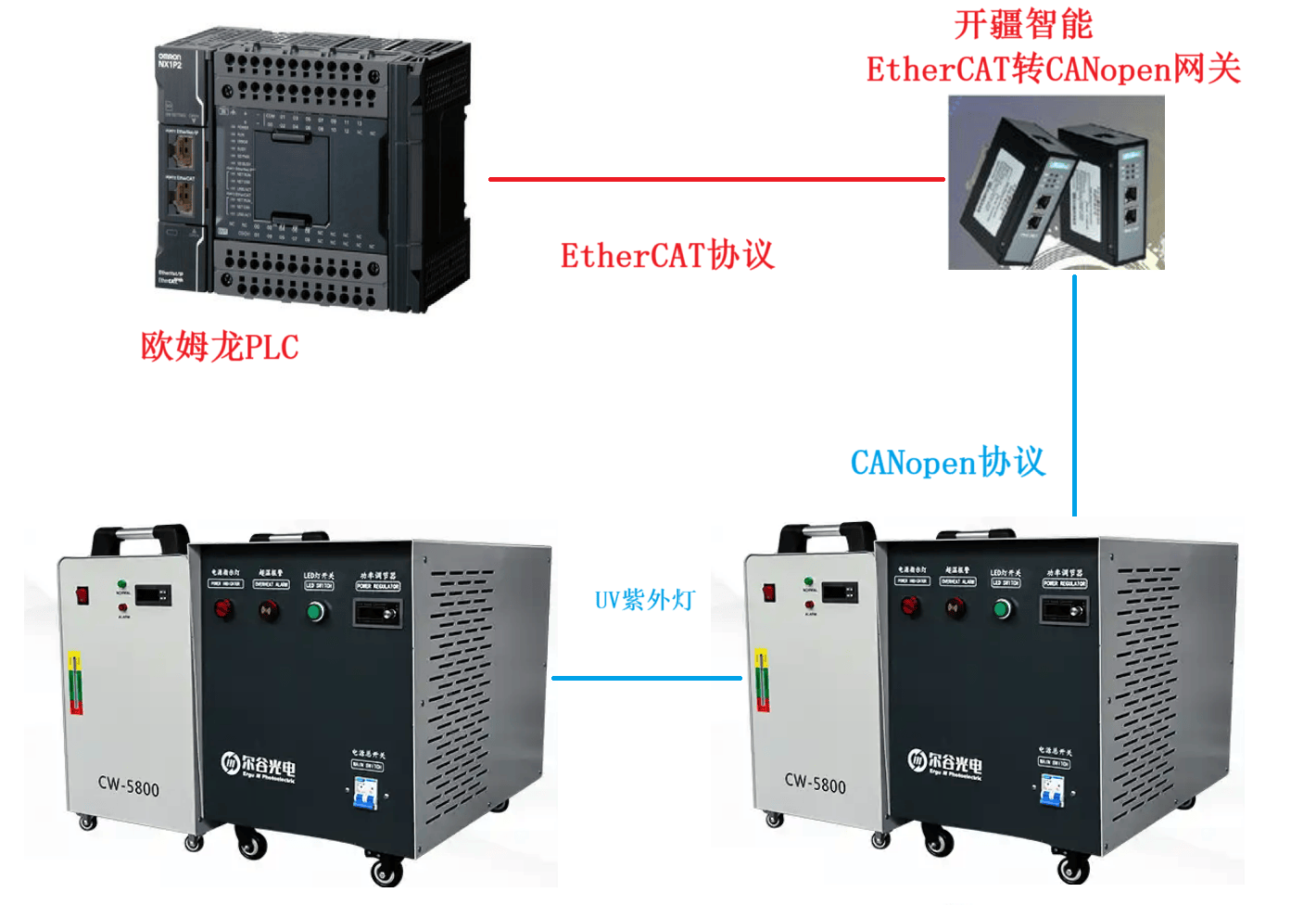
开疆智能EtherCAT转CANopen网关连接UV灯配置案例
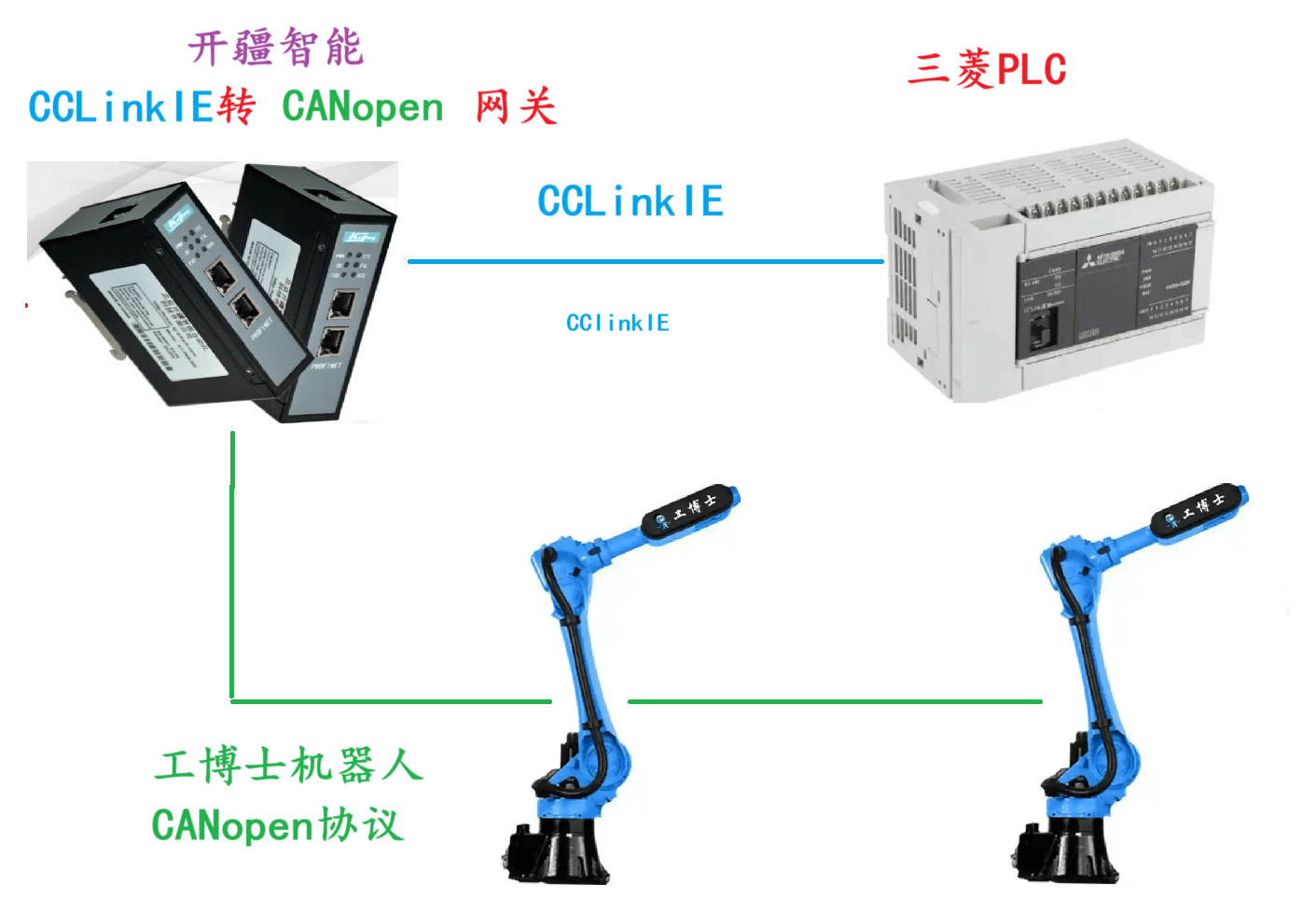
开疆智能CCLinkIE转CANopen网关连接GBS20机器人配置案例
CANopen转EtherCAT协议转换案例解析

多设备联动,canopen转Ethercat网关设备接入国产 PLC 控制系统方案落地

EtherCAT转CANopen网关与伺服器在汇川组态软件上的配置步骤

协议大和解:ETHERCAT转CANopen网关配置

当PLC遇上电焊机器人:EtherCAT转CANopen上演工业级“语言翻译官”
EtherCAT转CANopen协议网关应用详解
开疆智能Canopen转Profinet网关连接工博士GBS20机器人配置案例



评论