 基于IHM16M1开发板调节电机转速
基于IHM16M1开发板调节电机转速

01测试介绍
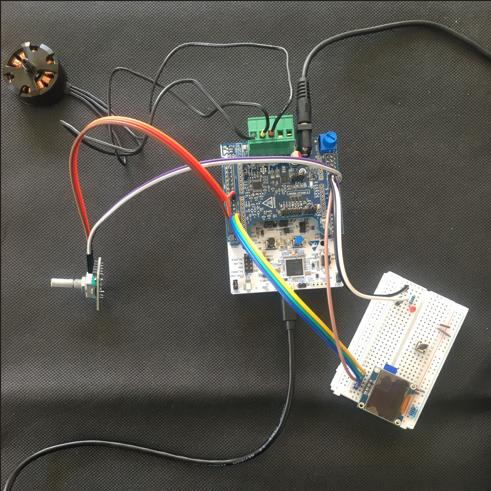
测试硬件:
IHM16M1 +NUCLEO-G431RB 电机套件
SSD1306 OLED IIC接口显示屏·
EC1 旋转编码器
RED LED 灯
ZD2808-V1.9 BLDC 电机
杜邦线+万用板+Type-C连接线
12V 1A开关电源
测试使用EC1旋转编码器调节电机的目标转速,使用开发板user1按钮启动/停止电机。OLED显示电机转速和调节转速设置,LED指示电机状态
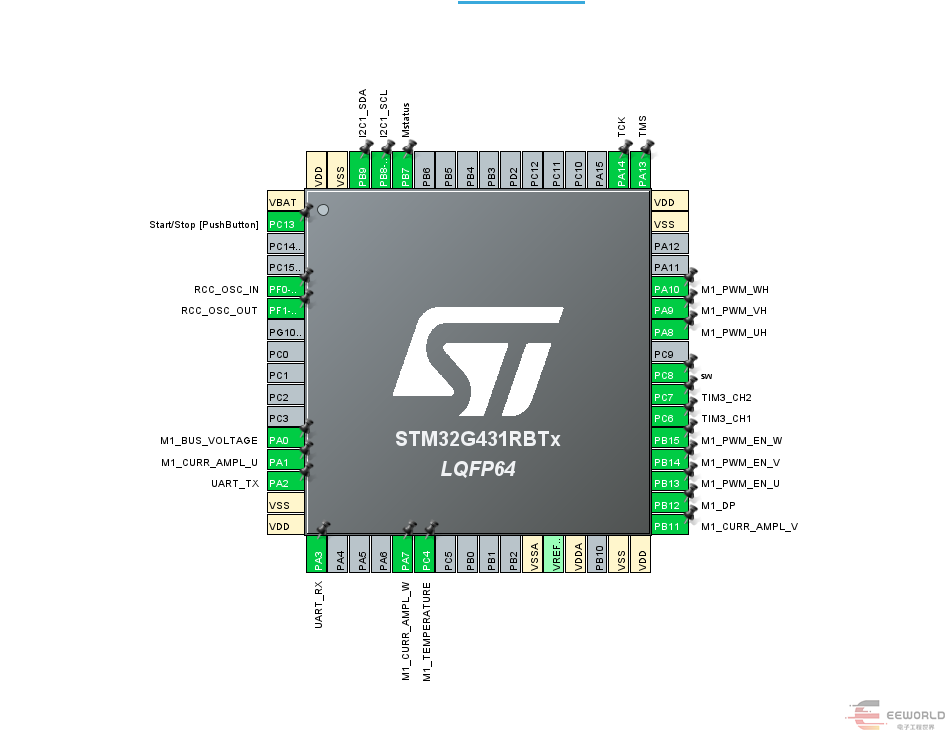
02开发板资源分配
SSD1306 OLED使用 I2C1 接口,引脚 PB9 =>SDA ,PB8 => SCL
EC1旋转编码器 使用 TIM3定时器 ,引脚 PC6 => TIM3_CH1,PC7 => TIM3_CH2
RED LED ,引脚 PB7 => LED
03程序设置与引脚分配
1、旋转编码设置
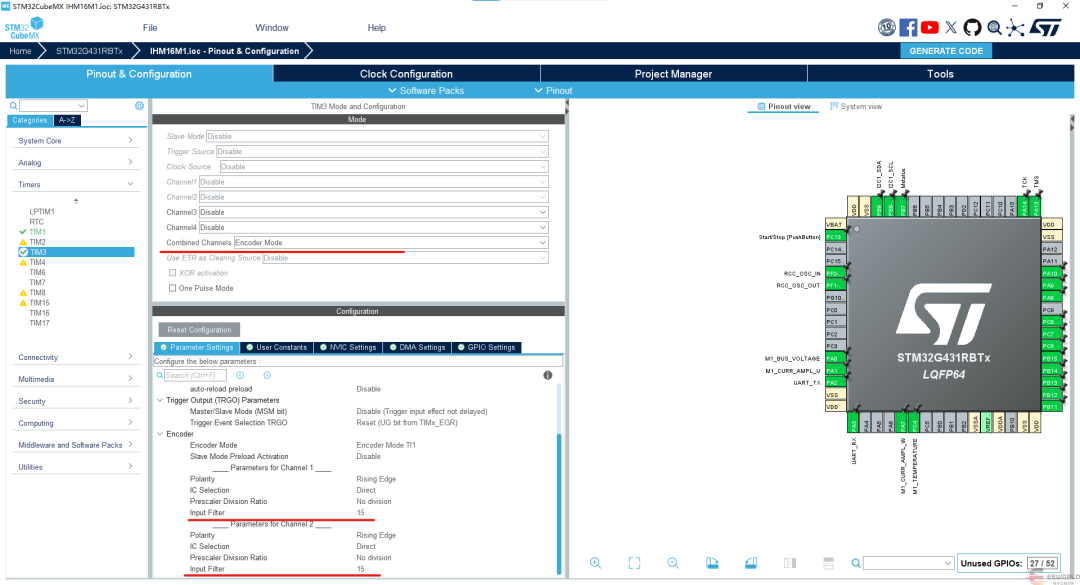
EC1旋转编码器,使用TIM3定时器,模式设置为:ENCoder MODE,引脚PC6 => EC1_CLK, PC7 => EC1_DT
输入过滤值选择:15,其它默认。如果EC1旋转时跳动厉害,可以降低TIM3预分频器。
2、SSD1306 128*64 OLED
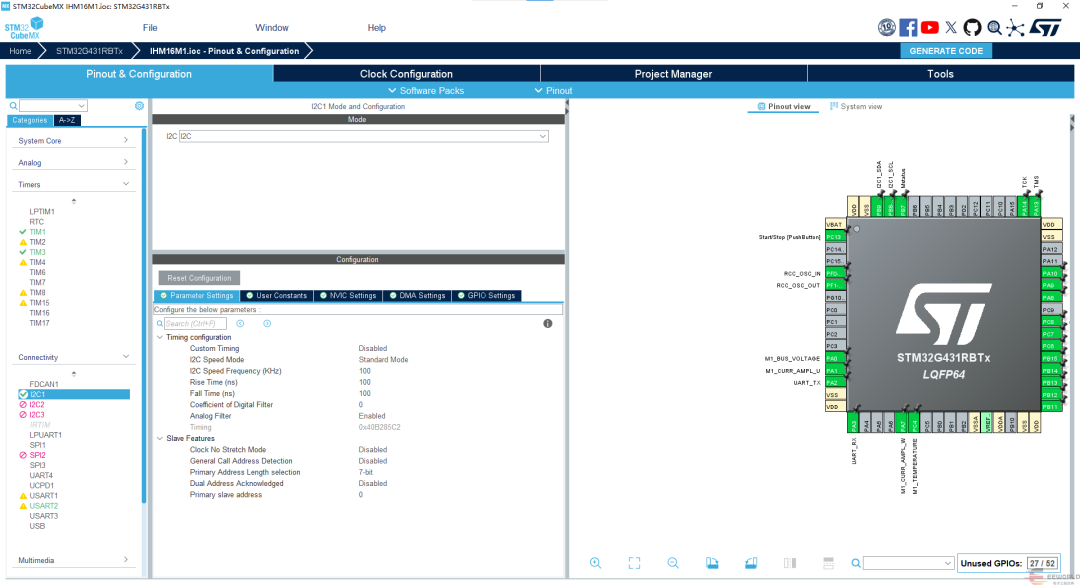
OLED使用I2C1作为控制,引脚PB9 =>OLED_SDA ,PB8 => OLED_SCL
3、RED LED
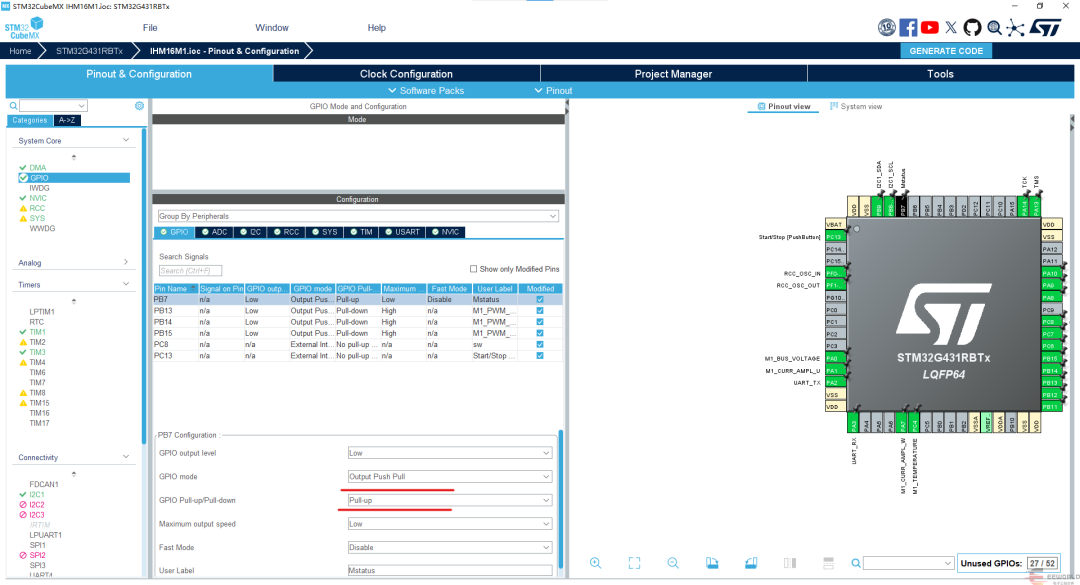
LED使用GPIO PB8引脚,将引脚设置上拉和输出模式。
04程序与工作原理
1、EC1是一种简易的旋转编码器,可以生产两路脉冲CLK、DT,该组脉冲相差90度,编码器作为机械部件其输出的波形不如磁编的好,所以输出引脚需要上拉电阻和103的电容滤波。
编码器可以使用__HAL_TIM_GET_COUNTER(&htim3)获得编码的计数累加值。__HAL_TIM_SetCounter(&htim3,0);设置编码器的初始值。
向上滑动阅览
/* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_DMA_Init(); MX_ADC1_Init(); MX_ADC2_Init(); MX_CORDIC_Init(); MX_TIM1_Init(); MX_USART2_UART_Init(); MX_MotorControl_Init(); MX_I2C1_Init(); MX_TIM3_Init(); /* Initialize interrupts */ MX_NVIC_Init(); /* USER CODE BEGIN 2 */ rspeed = MC_GetMecSpeedReferenceMotor1(); HAL_TIM_Encoder_Start(&htim3,TIM_CHANNEL_ALL); ssd1306_Init(); ssd1306_Fill(Black); ssd1306_SetCursor(0, 0); ssd1306_WriteString("EEWORLD", Font_11x18, White); ssd1306_UpdateScreen(); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { if (IDLE == MC_GetSTMStateMotor1()) { /* Ramp parameters should be tuned for the actual motor */ HAL_GPIO_WritePin(Mstatus_GPIO_Port,Mstatus_Pin,GPIO_PIN_RESET); speed = 0; counter = __HAL_TIM_GET_COUNTER(&htim3); if(counter != counter_old) { //rspeed = MC_GetMecSpeedReferenceMotor1(); rspeed += counter/2; if( rspeed <0) { rspeed=0; __HAL_TIM_SetCounter(&htim3,0); } if( rspeed > 420) { rspeed=420; __HAL_TIM_SetCounter(&htim3,0); } MC_ProgramSpeedRampMotor1(rspeed, 1000); } counter_old = counter; } else { HAL_GPIO_WritePin(Mstatus_GPIO_Port,Mstatus_Pin,GPIO_PIN_SET); speed = MC_GetMecSpeedAverageMotor1(); } ssd1306_Fill(Black); ssd1306_SetCursor(0, 0); ssd1306_WriteString("SPEED TEST", Font_11x18, White); ssd1306_SetCursor(0, 20); memset(MessageStr,'�',sizeof(MessageStr)); sprintf(MessageStr,"%d RPM",speed * 6); ssd1306_WriteString(MessageStr, Font_11x18, White); ssd1306_SetCursor(0, 40); memset(MessageStr,'�',sizeof(MessageStr)); sprintf(MessageStr,"%d R",rspeed * 6); ssd1306_WriteString(MessageStr, Font_11x18, White); ssd1306_UpdateScreen(); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ }
2、电机的状态使用MC_GetSTMStateMotor1()函数返回,IDLE状态为电机停止且准备好状态,在该状态下可以调节参数和设置电机启动。本例将电机参数设置放在该状态下完成。
向上滑动阅览
if (IDLE == MC_GetSTMStateMotor1())
{
/* Ramp parameters should be tuned for the actual motor */
HAL_GPIO_WritePin(Mstatus_GPIO_Port,Mstatus_Pin,GPIO_PIN_RESET);
speed = 0;
counter = __HAL_TIM_GET_COUNTER(&htim3);
if(counter != counter_old)
{
//rspeed = MC_GetMecSpeedReferenceMotor1();
rspeed += counter/2;
if( rspeed <0)
{
rspeed=0;
__HAL_TIM_SetCounter(&htim3,0);
}
if( rspeed > 420)
{
rspeed=420;
__HAL_TIM_SetCounter(&htim3,0);
}
MC_ProgramSpeedRampMotor1(rspeed, 1000);
}
counter_old = counter;
}
else
{
HAL_GPIO_WritePin(Mstatus_GPIO_Port,Mstatus_Pin,GPIO_PIN_SET);
speed = MC_GetMecSpeedAverageMotor1();
}
参数设置:MC_ProgramSpeedRampMotor1(rspeed, 1000);该函数可以设置从上一个状态到目标状态需要持续的时间,其时间斜率需要根据电机的性能参数而定。
05测试
修改转速过程,使用旋转编码器进行参数的调节,顺时针:增加转速,逆时针:降低转速
以上测评内容撰写自电子工程世界(EEWORLD)用户:bigbat。感谢这位小伙伴对测评活动的大力支持!
-
OLED
+关注
关注
121文章
6372浏览量
234319 -
编码器
+关注
关注
45文章
4013浏览量
143377 -
电机
+关注
关注
145文章
9707浏览量
154812 -
开发板
+关注
关注
26文章
6428浏览量
120963
原文标题:【测评分享】IHM16M1开发板电机调速攻略
文章出处:【微信号:易络盟电子,微信公众号:易络盟电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
Nucleo-F446RE+X-NUCLEO-IHM07M1生成的应用为什么启动设置参数无效?
X-NUCLEO-IHM16M1驱动板上三电阻采样和单电阻采样是怎么切换的?
STM32F103RB+IHM07M1 SDK中显示Feedback Error是哪里的问题?
X-NUCLEO-IHM07M1电机调速降不了是什么原因导致的?
《电子发烧友电子设计周报》聚焦硬科技领域核心价值 第13期:2025.05.26--2025.05.30
转:P-NUCLEO-IHM001 电机开发板串口调试指南
怎么制作一个用PWM调节电机转速的程序
请问F28027F控制无刷电机转速的函数是什么?
如何通过PWM调节电机的PWM?
Explorer 16开发板用户指南

X-NUCLEO-IHM09M2电机控制扩展板技术解析与应用指南



评论