 研制仿生电子触角传感器,突破无视觉环境感知瓶颈
研制仿生电子触角传感器,突破无视觉环境感知瓶颈

夜行昆虫凭借柔韧的触角,在黑暗中自如导航、感知周围环境,甚至探测微小纹理。你是否想过,机器人也能拥有这样的“超能力”?香港科技大学等合作团队受此启发,研发出一款仿生电子触角传感器(E-Antenna),让机器人通过触觉“看清”世界!这项突破性成果以“A robust and omnidirectional-sensitive electronic antenna for tactile-induced perception”为题目已发表于顶级期刊《自然·通讯》(Nature Communications)。
在机器人触觉传感领域,研究人员开发了各类性能卓越的仿生电子皮肤,实现了类皮肤性质的高分辨率高精度触觉传感能力(如基于视觉的Gelsight,磁性皮肤、离子传感皮肤、自发电传感皮肤等),成功辅助机器人完成以自适应抓取和人机交互为核心的应用。
然而,自然界中,除用于被动感知的平面类型的皮肤之外,还有一类用于主动感知的系统,如人类细长的手指、猫的胡须等。特别的,自然界中视力退化的夜行昆虫/动物进化出了细长柔韧的触角/触须形态的触觉系统,使其能够主动探索和感知环境信息。例如,蟑螂利用触角在黑暗中沿墙快速移动,感知障碍物并调整方向;海豹通过触须探测气流和温度变化,精准定位猎物;鱼类则依靠侧线系统的细小触毛感知水流方向。而这种“主动”对环境的探知能力,是目前机器人缺乏且亟须的。
就人造触觉传感器而言,机械鲁棒、全向灵敏感知、灵活集成被认为是其广泛应用的关键前提。然而,要同时实现这三大特性仍面临巨大挑战。由于感知精度、精巧设计和机械鲁棒性等因素之间的相互制约,现有技术难以打造出兼具高鲁棒性、全向灵敏感知和灵活集成的触觉传感器,这一挑战也限制了人造触觉传感器在机器人系统上的部署。
拓展机器人触觉系统形态,提出机械鲁棒全向灵敏感知的仿生电子触角系统
为攻克这一难题,来自香港科技大学MIRS实验室(Multi-I Robotic System Lab)等合作团队的研究人员从自然界汲取灵感,开发了一种受夜行昆虫触角启发的电子触角系统(E-Antenna)。该电子触角具备卓越的机械鲁棒性、全向灵敏感知和灵活机器人系统适配能力,能够承受1800度的扭转、224%的拉伸和360度的弯折。搭配模仿昆虫的主动触觉感知算法,研究人员展示了电子触角成功辅助移动机器人实现高精度无视觉导航,地面纹理识别,以及辅助操作机器人实现弯曲表面上的共形操作。
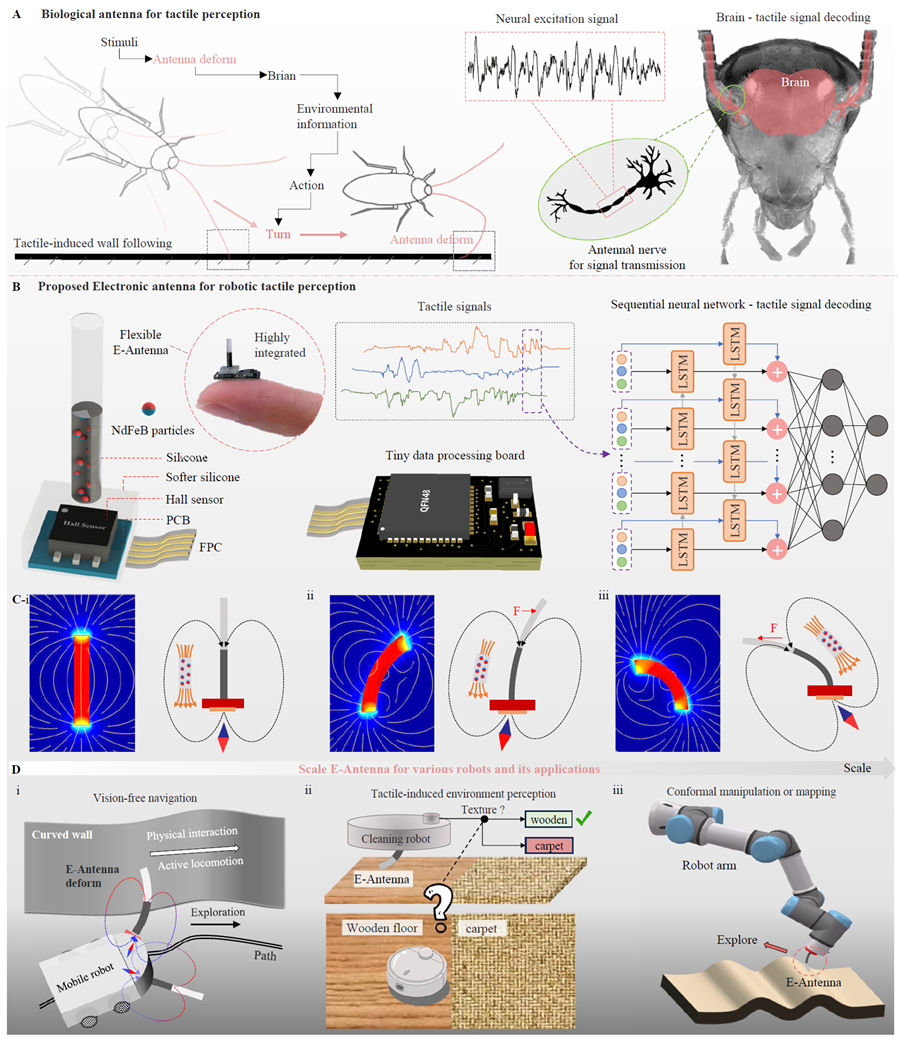
图1仿生电子触角系统设计与机器人集成应用概览
在系统化的理论建模指导下,研究团队进一步采用非均匀刚度分布和部分磁化策略提升了电子触角的灵敏度和方向感知能力,实现了全向不高于1.76°误差的方向感知精度,比生物触角高出约17倍。
此外,研究团队还验证了电子触角的动态感知与传感一致性。结果显示,在动态响应中,其对动态刺激的振幅和频率的感知线性度高达0.9979,能够精确追踪三角波和方波刺激。在一致性测试中,电子触角在经历3500次循环测试后仍保持稳定的感知能力。
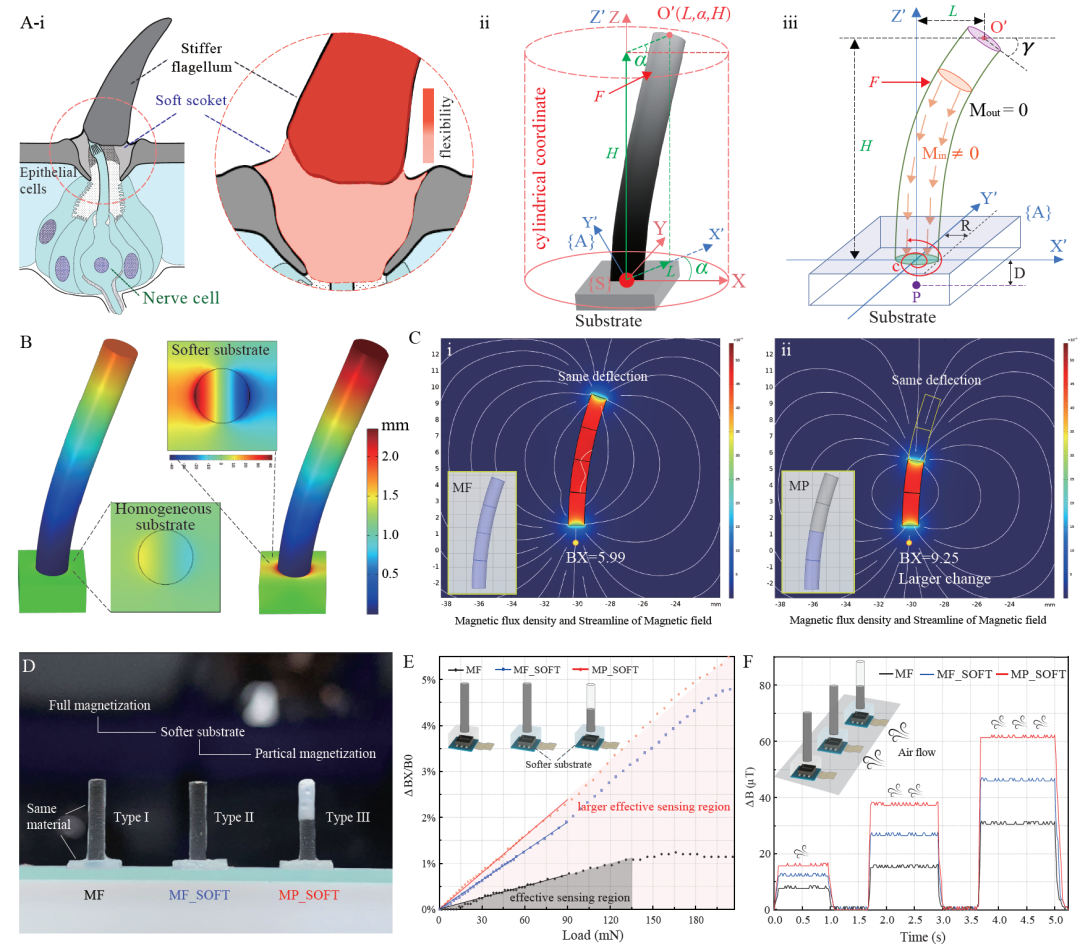
图2优化设计方案
在机械鲁棒性方面,电子触角也展现了令人印象深刻的性能:它能够承受高达1800°的扭转、224%的拉伸以及360°的弯曲,甚至还能在承受远超自重数百万倍的挤压力或针刺穿透后依然能迅速恢复原有形状并保留传感功能。这种超强的机械鲁棒性使其在动态环境中面对剧烈形变或意外损伤时仍能保持可靠运行。
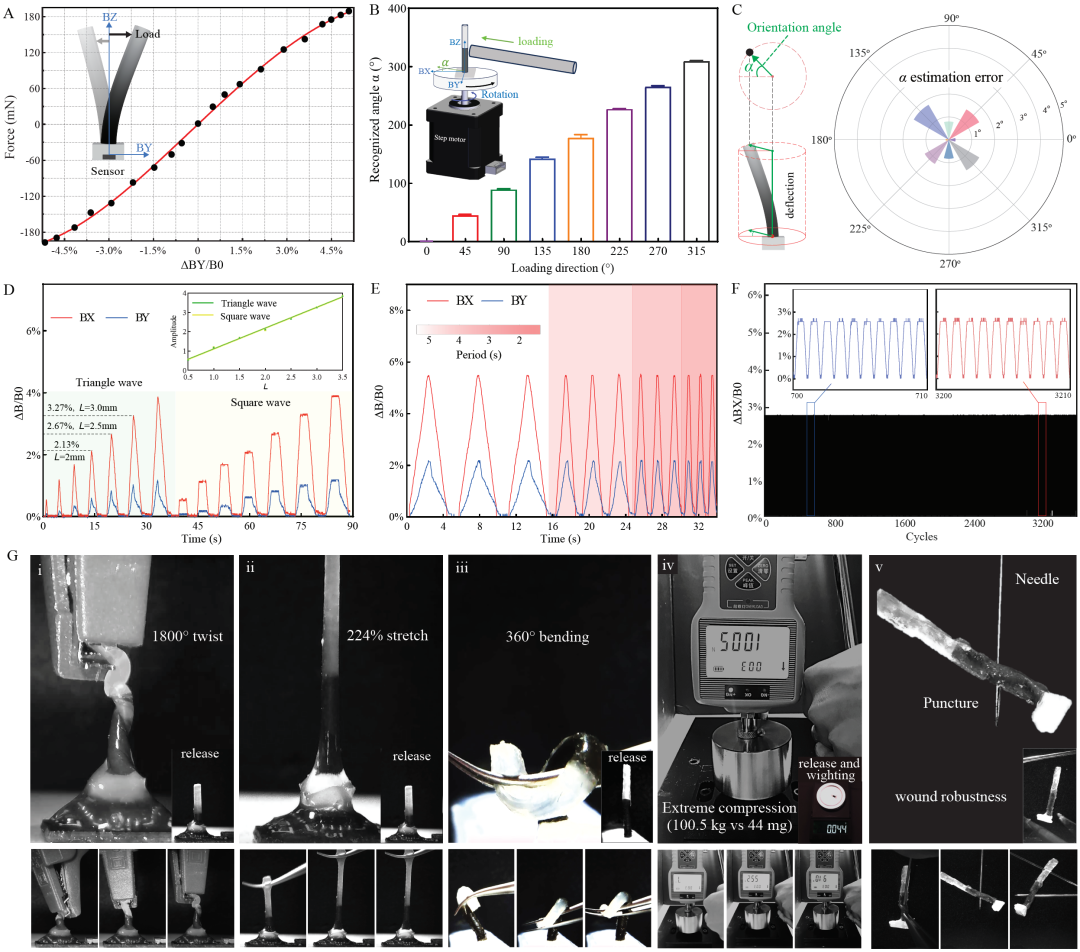
图
3精确传感与卓越机械鲁棒性
AI辅助的主动触觉感知策略
受启发于生物以触角为中心的主动触觉探索策略,研究人员将电子触角集成于机器人平台上通过主动运动来探索环境,以捕捉更丰富的空间特征。随后,使用滑动窗口动态构建保留接触事件时间依赖性和上下文信息的连续触觉事件链,并将此连续信息输入多层时序神经网络进行感知分析,解析得到环境的信息。研究人员在基于触觉的界面曲率识别任务上验证了该策略的有效性,得到了平均误差小于0.9°高精度曲率识别结果。
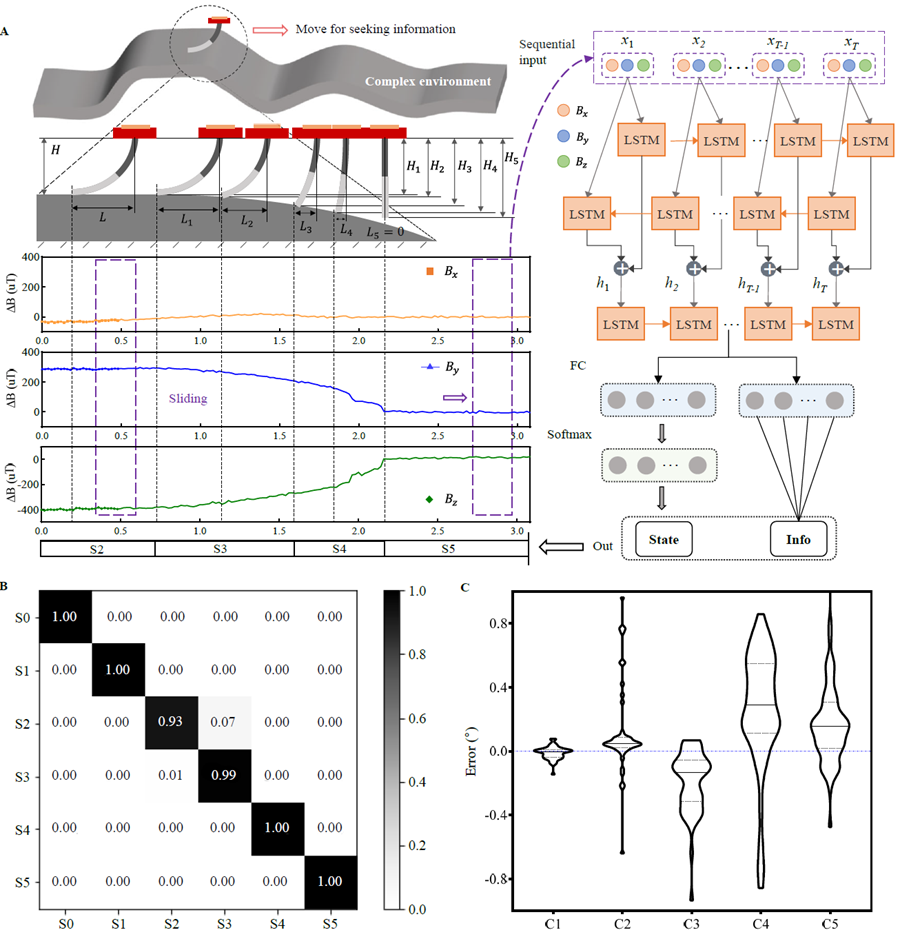
图4 AI辅助的主动触觉感知策略与曲面识别性能
无视觉辅助的接触式导航
在视觉受限或完全无光环境中,触觉导航系统展现出不可替代的核心价值。以夜行昆虫为例,这些生物在完全黑暗的环境中仅依靠触觉感知就能实现精准墙壁跟踪和障碍物感知。作为视觉系统的补充,研究人员展示了电子触角在增强移动机器人触觉感知以实现类生物墙壁跟随导航的能力,达到了2.04毫米波动范围的蛇形墙壁跟随精度。 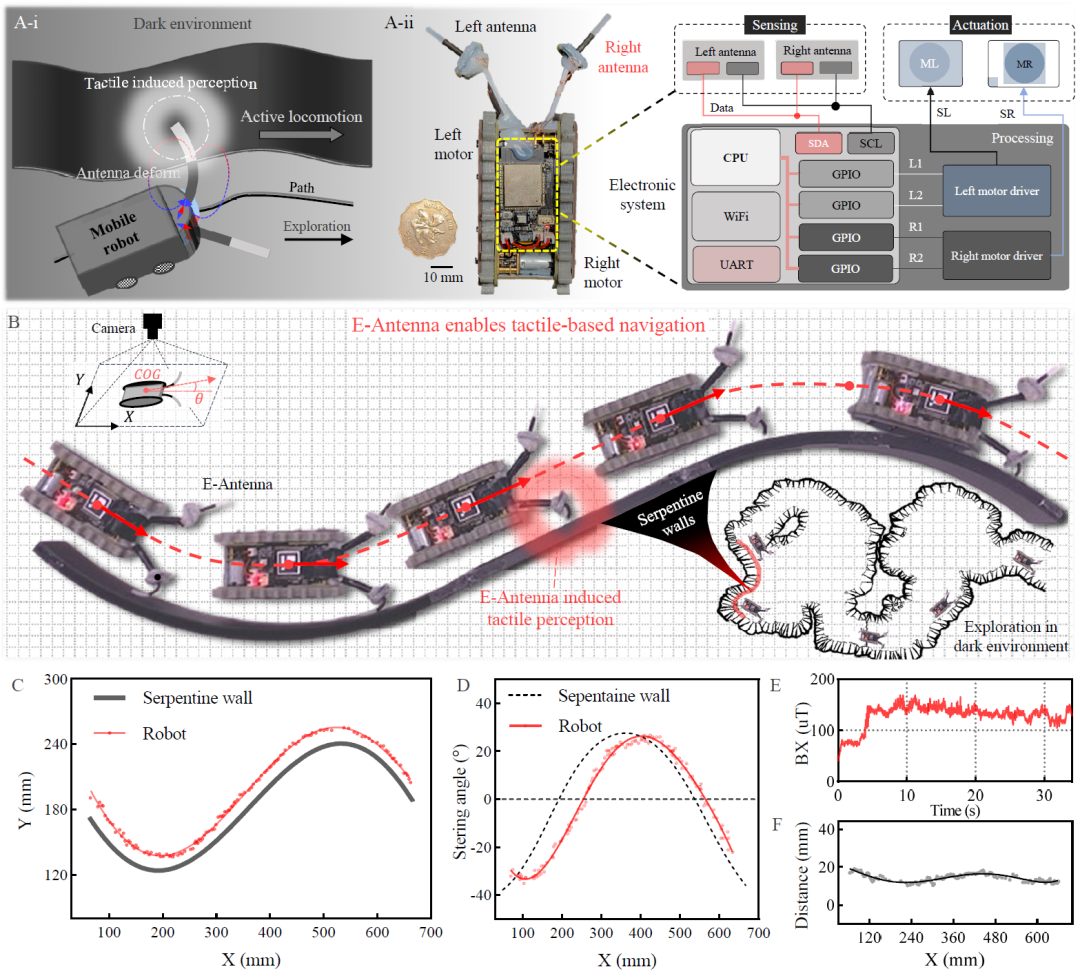
图
5电子触角赋予移动机器人触觉感知能力实现类生物的沿墙导航
基于触觉的地面纹理识别
当前移动机器人技术面临着一个普遍性难题——地面纹理的精确感知,这一挑战在家用清洁机器人领域尤为突出。由于缺乏有效的表面识别能力,传统清洁设备往往无法根据地面材质调整工作模式,不仅导致清洁效率低下,更可能对地毯、实木地板、大理石瓷砖等地面造成不可逆的损伤。针对这一问题,研究人员将电子触安装到移动机器人的底部,辅助机器人实现了对地面纹理的实时检测。在地毯,木纹瓷砖,木地板上的识别准确度达到了97.3%,为智能清洁机器人提供了可靠的潜在纹理感知解决方案。
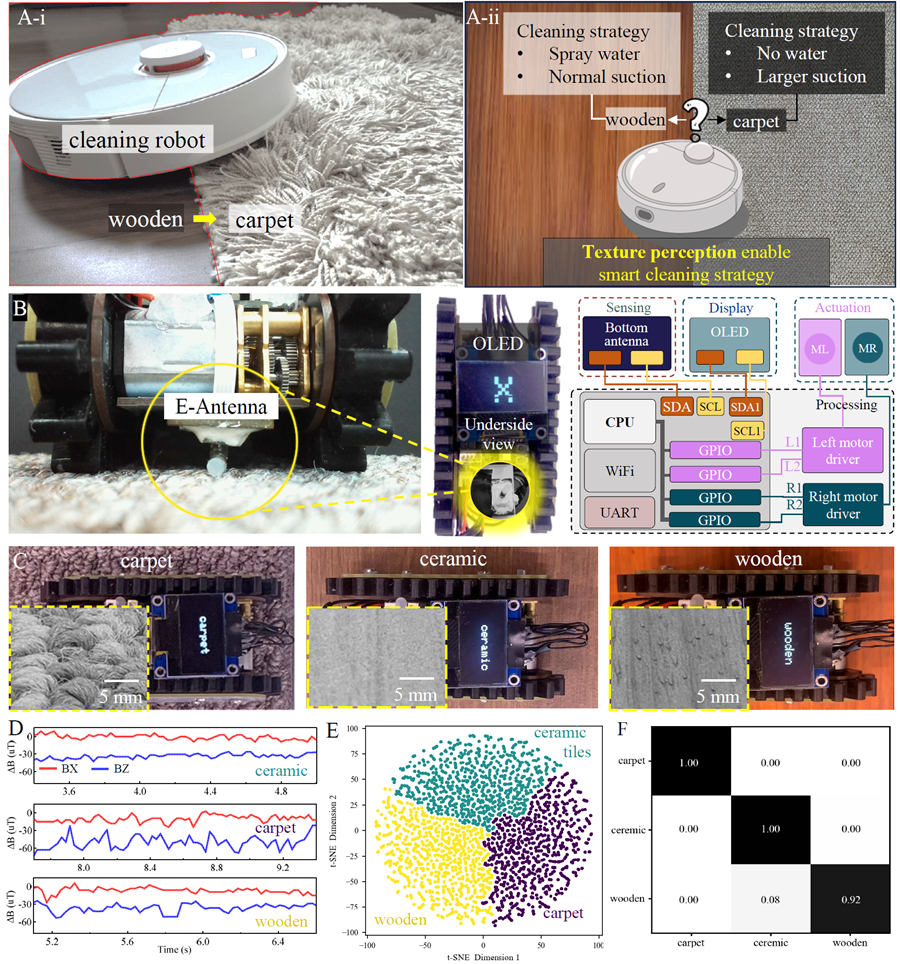
图6电子触角赋予移动机器人实时地面感知能力
触觉赋能操作机器人实现恒力共形操作
建筑机器人作为解决行业劳动力短缺和提升工作效率的重要技术手正受到越来越广泛的行业关注。然而,这类机器人在执行需要精确接触感知的任务时仍面临挑战,尤其是在视觉系统无法提供准确反馈信息的工况下。以未知曲面上的保形刷洗或者刷涂作业为例,这项对人类操作者而言相对简单的工作,对机器人系统却构成了严峻考验。问题的核心在于难以精确获取柔性刷毛与曲面之间的接触状态信息,由于柔性刷毛与刚性机械臂之间的力传导存在显著失真,传统安装在工具法兰上的力传感器无法提供及时准确的柔性工具接触端的反馈,导致刷洗/刷涂力度波动大、表面覆盖率低下等突出问题。针对这一挑战,研究人员将电子触角直接嵌入刷子刷毛内,使其与刷毛同时偏转以检测接触状态和评估接触力。最终实现了在具有三个凸起部分的蛇形表面上全覆盖、维持稳定恒力操作(误差0.34N)的共形刷涂实验。
图7电子触角赋予操作机器人恒力共形操作能力
结语与展望
总结来说,这项研究探索了仿生触角形态的人造触觉传感器在机器人系统中的部署于应用,提出的电子触角成功辅助移动机器人实验了基于触觉的环境感知,并辅助操作机器人实现了具有挑战性的曲面共形操作。
正如来自港科大MIRS实验室的论文第一作者任豪所说:“我们的目标是开发鲁棒人造触觉传感器增强机器人环境感知的能力,辅助机器人完成更具挑战性的任务。未来我们会以任务为导向继续探索电子触角与其他传感器的集成融合以及更多的柔性感知应用。”
参考文章:
https://www.nature.com/articles/s41467-025-58403-3
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55829浏览量
795482 -
机器人
+关注
关注
214文章
31649浏览量
224548
发布评论请先 登录
安徽工程大学、西湖大学:仿生触觉传感器新突破,实现高精度跨域目标识别

核心赋能·突破瓶颈|陶瓷线路板助力MEMS传感器领跑物联网新时代
超声波传感器的“防水铠甲”:解锁恶劣环境下的精准感知
HDC1010数字湿度与温度传感器:精确、低功耗的环境感知利器
OPT3007:超薄环境光传感器的设计指南
安森美传感器芯片创新突破机器人感知边界
湖北珞珈实验室突破车用智能传感器技术赋能车载感知升级 创近5亿经济效益
安森美图像传感器在机器视觉的应用

集成光传感器:工业智能时代的环境感知核心
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
事件相机会成为自动驾驶的下一代核心传感器?
小身躯大能量:小型超声波传感器,开启智能感知新纪元

以“光”为尺 对射光纤传感器:精准感知赋能千行百业




评论