 突破带宽与延迟! 无人机对决从电子干扰到“撒网”与“竹竿捅机”的奇招转变
突破带宽与延迟! 无人机对决从电子干扰到“撒网”与“竹竿捅机”的奇招转变

无人机机动灵活的攻击效果十分突出,因此针对无人机的干扰工作从未停止。常用的方法有电子干扰、无人机自杀式阻击等方式。
但各方为了降低自身损失,同时不断规避电子干扰,传统的图像处理打击技术重新受到重用。
在无人机摄像头的基础上加装图像处理板,板卡在算法的作用下,能够识别飞行的无人机,这种方式可以有效降低电子干扰对无人机的影响,同时又能精准锁定无人机,为后续的攻击作基础准备。
但是,由于小型无人机无法携带大量弹药,如何打击对方无人机也是一个难点。
脑洞大开的各方给出了两种方式,这两种方式都基于图像识别的锁定跟踪。一个是利用无人机装载小型投掷物,例如撒网的形式,将对方无人机强制下线。
另一个方法是采用“竹竿捅飞机”的方法,在无人机前端固定一根竹竿,通过图像识别锁定跟踪目标后,能够主动加速追击目标,然后将竹竿伸向对方无人机的桨叶,从而达到损坏桨叶,迫降无人机的目的。
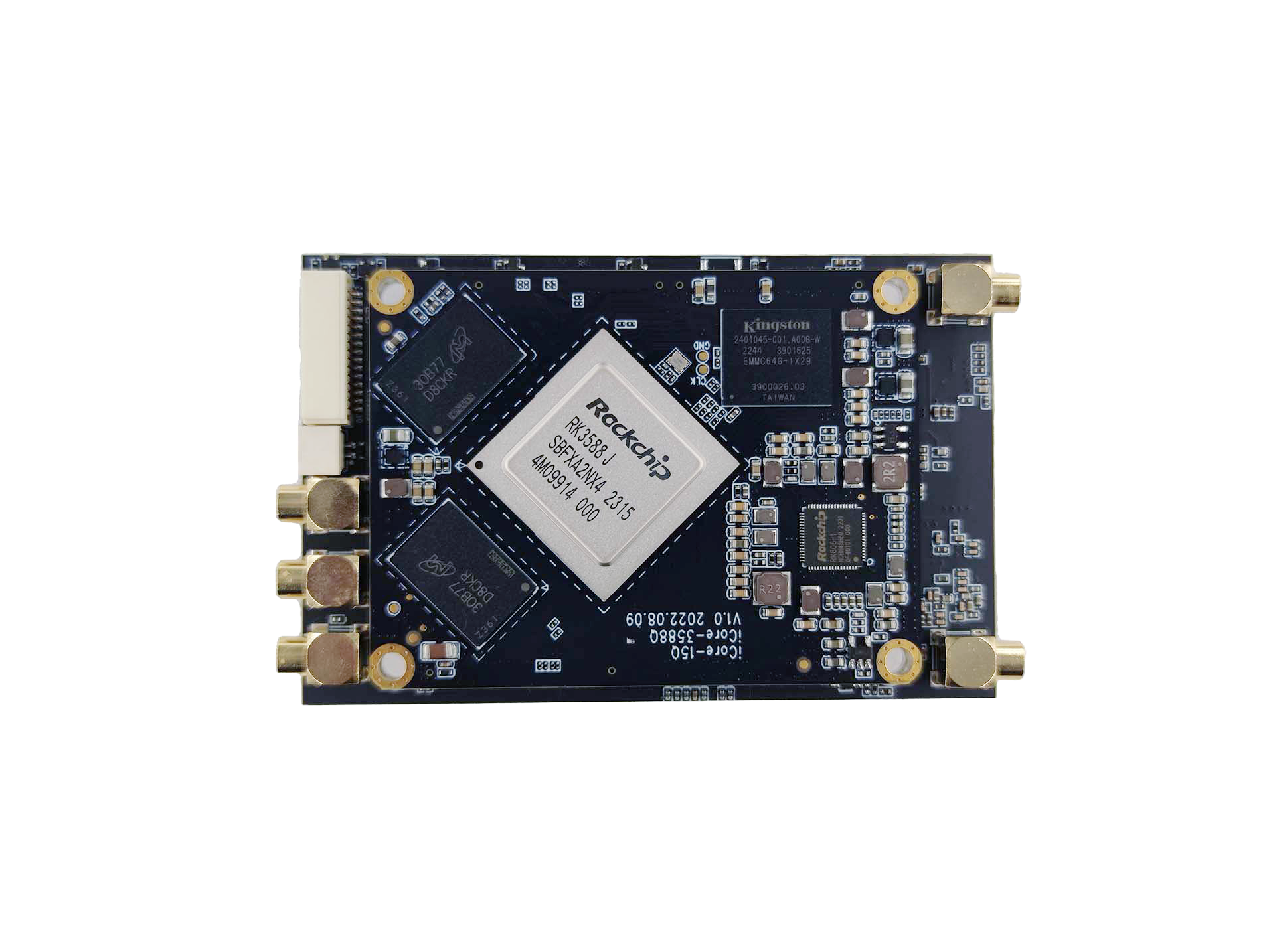
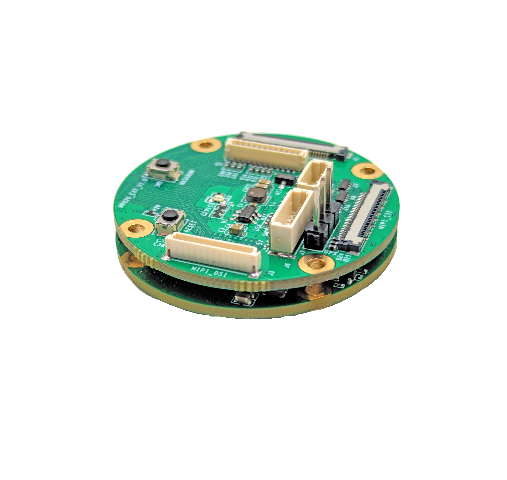
这两种模式都需要减少电子干扰,同时提高作用距离,前者可以采用慧视光电开发的RV1126芯片打造的Viztra-LE026图像处理板和RK3588开发而成的Viztra-HE030图像处理板进行目标的分类识别、锁定跟踪打击。
剩下的就是作用距离的问题,这类穿越机通常作用距离有限,一方面是带宽不足,另一方面是整个无人机控制链路的延迟过高。因此低延迟、窄带宽对于这两项技术帮助极大。
慧视光电推出的基于RV1126和RK3588的低延迟图传解决方案就可以很好地解决这个问题。
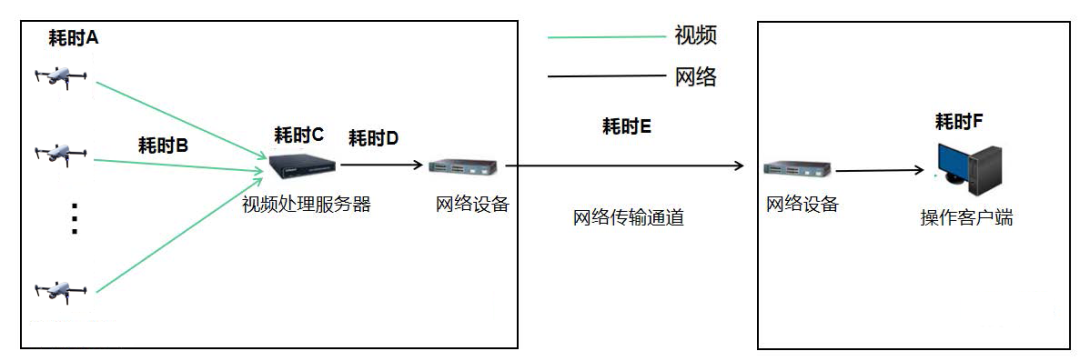
方案将慧视GS远程可视化低延迟实时控制系统和图像处理板深度融合,实现低延迟控制无人机目标识别干扰打击。
方案功能如下:
(1)在一个窄带收发信道内,例如在信道有效带宽0.5Mb/s~2Mb/s内,多路视频和交互控制共用一对收发信道,信道支持数据透传,外部系统可以使用该信道,传输任意格式的数据;
(2)可实时调整视频码率,在低至500K带宽情况下依然可以回传清晰流畅的图像,使无人设备飞得更远;
(3)可实现视频中继转发;
(4)能够基于H265实时视频编码;
(5)可实现基于视频流的“人在回路低延迟控制”。基于普通60帧相机,实现15ms的低延迟编解码,加上数据链传输延迟时间在30ms左右,目前业界领先。通用性强,使用更加灵活,适用更多应用场景;
(6)支持多路SDI视频在低至500K带宽情况下的同时传输(1080P 60FPS),彻底解决“带宽苦恼”;
(7)整体时延约60ms(含相机、编解码、显示,不含传输),实现实时控制打击。
这样既能够保障无人机的图像识别能力,又能满足带宽和低延迟控制的需求,使得这两种无人机对抗方式得以实现,同时在对抗中占得优势。
-
带宽
+关注
关注
3文章
1048浏览量
43572 -
无人机
+关注
关注
237文章
11380浏览量
196697 -
电子干扰
+关注
关注
0文章
10浏览量
9928
发布评论请先 登录
偏远地区带宽不足 应急无人机该如何稳定工作?

这种类型的无人机,抗干扰能力超强
低延迟,低带宽,6T算力,应急救援无人机控制稳定性模块

无人机自动巡检系统:从手动操作到智能化的技术变革
离轴技术:赋能无人机精准配送的核心芯片应用
RK3576赋能无人机巡检:多路视频+AI识别引领智能化变革
为什么IMU是无人机稳定控制的的核心?
科普|无人机反制枪介绍

无人机群激光通信新纪元
RV1126系列Viztra-LE044图像处理板 无人机反制专用AI模块
低空物流:无人机开启未来配送新篇章
从侦测到反制:Cincoze 工控机强化无人机威胁应对力



评论