 人形机器人技术突破与先楫半导体HPM6E00系列高性能MCU芯片的适配性
人形机器人技术突破与先楫半导体HPM6E00系列高性能MCU芯片的适配性

1
前言
人形机器人,作为人工智能和自动化领域的尖端技术,承载着许多复杂的工程挑战。要实现其自主移动、动态平衡、智能感知等功能,需要融合高级控制算法、传感器集成、实时反馈与调整以及人工智能等技术。而作为实现这些目标的关键,主控芯片的选择起着至关重要的作用。本文我们将探讨人形机器人面临的技术难点,以及为什么先楫半导体 HPM6E00系列芯片因其体积小、性能强大、丰富的外设功能而成为该领域的理想选择。
2
人形机器人核心技术难点
1. 动态平衡与高级控制算法
人形机器人的动态平衡是其能否实现稳定行走、站立、甚至跑步和跳跃的核心技术。为了保持平衡,机器人必须实时采集自身和环境的各种数据,并通过动态平衡算法(如逆运动学、状态反馈控制等)调整各关节的动作。机器人在不同环境中行走时,其重心会随时变化,如何让机器人在不倒下的同时完成复杂动作是一个极为困难的任务。这涉及到多轴运动控制以及复杂的力学计算,通常需要使用模糊控制、PID控制等方法进行动态实时调整。控制系统的实时性要求极高,每毫秒内都需要快速处理数据并做出调整。
2. 传感器集成与实时反馈
为了实现精准控制,人形机器人需要集成大量的传感器,包括惯性测量单元(IMU)、力传感器、位置传感器、加速度计和陀螺仪等。这些传感器的数据需要快速传输到主控芯片,并由芯片通过高级算法进行计算和处理。
实时反馈和调整是人形机器人精确动作控制的关键。传感器采集的数据需以毫秒级的速度传输至主控芯片,随后主控芯片对各个关节电机发出调整指令,确保机器人的动作与外部环境变化保持同步。
3. 人工智能与机器学习
为了让机器人在复杂环境中具备自主学习能力,人工智能(AI)和机器学习(ML)算法被广泛应用。通过深度学习和强化学习,机器人可以根据环境变化自我调整并优化行为。这些算法需要芯片具备强大的计算能力,以在极短时间内处理大量数据并做出智能决策。例如,通过视觉识别和行为预测,机器人可以避开障碍物或与人类进行交互,提升其在复杂场景中的适应性和稳定性。
3
先楫半导体 HPM6E00 系列芯片的应用优势
面对人形机器人技术中的诸多挑战,选择一款高性能且功能齐全的主控芯片尤为重要。上海先楫半导体的 HPM6E00 系列芯片凭借其小巧的体积、强大的计算能力和丰富的外设支持,为解决这些难点提供了卓越的解决方案。
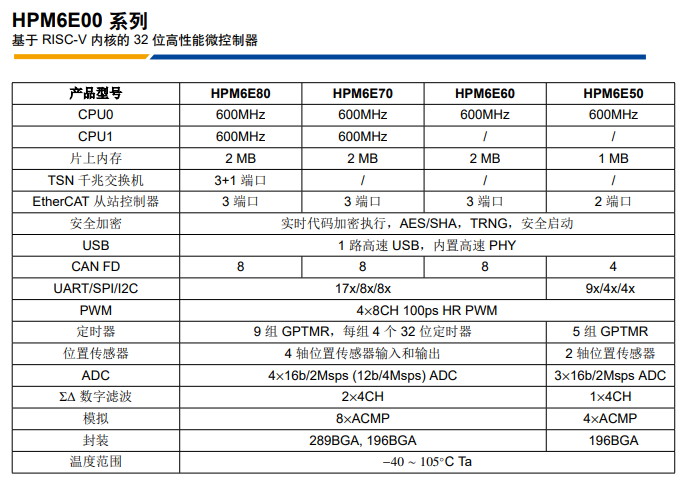
1. 体积小,BGA封装
HPM6E00 系列芯片采用BGA封装,使其体积小巧、便于集成。人形机器人对硬件体积有严格要求,尤其是为了保持平衡和移动灵活性,系统需要在有限的空间内搭载尽可能多的传感器和功能模块。BGA封装不仅节省了空间,还具有良好的散热性能,有助于确保芯片在高强度运算中保持稳定。

2. 丰富的性能支持高级控制算法
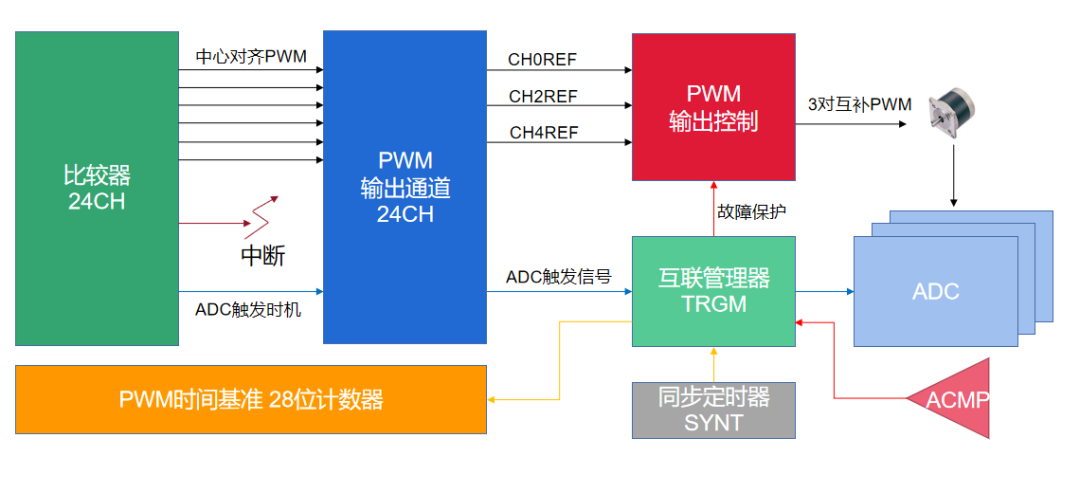
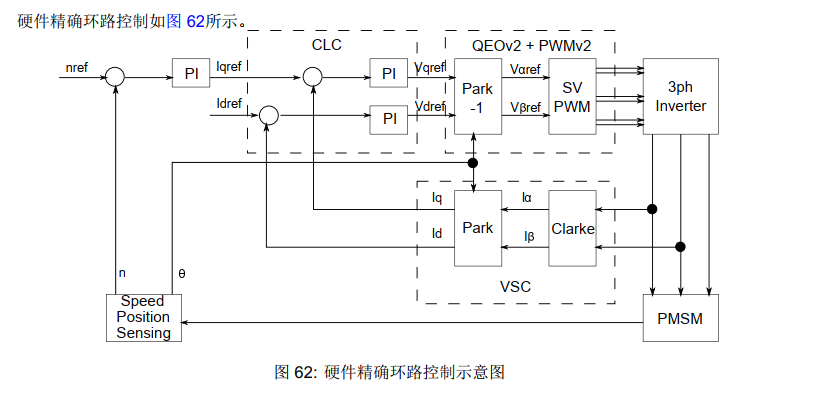
HPM6E00 系列芯片内置高性能多核处理器,支持实时处理复杂的运动控制算法。芯片内的PWM(脉宽调制)与硬件电流环控制功能,尤其适用于电机驱动与控制,可以实现机器人关节电机的精确调节。结合ADC(模数转换器),HPM6E00 能够高效采集电机和传感器的反馈数据,并通过硬件电流环实现快速闭环控制。这种高效的实时控制系统能够迅速响应机器人每个关节的状态变化,确保其在行走、站立、转弯等过程中保持稳定。
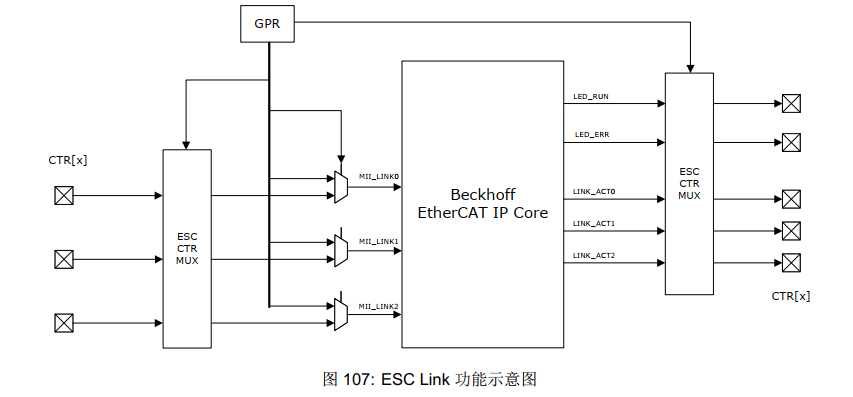
3. EtherCAT 接口与 TSN(时间敏感网络)支持
HPM6E00 系列集成了EtherCAT接口,它是一种工业级实时通信协议,广泛应用于机器人和自动化控制中。EtherCAT 提供极低的延迟和高带宽,使机器人能够在毫秒级传输传感器数据和控制指令,确保动作控制的准确性和同步性。同时,HPM6E00 支持TSN(时间敏感网络),可以为机器人内的多种传感器提供精确的时间同步。在动态平衡控制中,各传感器的数据需要实时同步处理,TSN 能够保证多传感器数据的无缝融合,避免因数据不同步而导致的控制误差。
4. 多路 CANFD 接口
为了满足机器人复杂模块之间的通信需求,HPM6E00 系列提供了多路 CANFD 接口,这是一种高速、抗干扰能力强的通信协议。CANFD 支持更高的带宽和数据帧,可以快速、稳定地传输关节控制器、传感器和执行器之间的数据。在人形机器人中,关节电机、传感器和主控单元之间的数据交换至关重要,CANFD 接口能够确保这些模块间的通信可靠性和实时性。
5. 硬件电流环与编码器数据处理
HPM6E00 系列芯片包含:4 个 8 通道增强型 PWM 控制器,PWM 调制精度高达100ps;多种运动传感器接口,包括增量式和绝对值位置传感器接口,旋转变压器解码接口和磁编码器接口;脉冲式位置输出接口和绝对值位置输出接口;包括运动控制单元,空间矢量变换和闭环控制器在内的硬件运动控制环路。内置的硬件电流环功能,可以极大提高电机控制的精度和响应速度。在人形机器人中,精确控制电机是确保关节灵活性和动作准确性的基础。通过与编码器的集成,HPM6E00 可以实现对关节位置、速度的高精度监测。
4
总结
人形机器人技术的不断发展依赖于先进的控制算法、传感器集成、动态平衡与实时反馈等技术的突破。而上海先楫半导体 HPM6E00 系列芯片凭借其小巧的设计、丰富的外设功能、高性能处理能力和强大的实时通信能力,为人形机器人行业提供了理想的技术支持。通过集成 PWM 控制、硬件电流环、EtherCAT、TSN 和多路 CANFD 接口,HPM6E00 系列芯片不仅满足了机器人对精确控制和快速响应的需求,还在复杂的实时反馈系统中展现出卓越的稳定性和性能优势。它无疑将为未来人形机器人技术的发展注入强大动力。
-
人形机器人
+关注
关注
7文章
1108浏览量
18581 -
MCU芯片
+关注
关注
3文章
260浏览量
13075 -
先楫半导体
+关注
关注
12文章
295浏览量
3427
发布评论请先 登录
【强势上新】HPM5E00:EtherCAT运动控制MCU,先楫半导体再拓工业总线产品新版图

有奖提问!先楫半导体HPM6E00系列新品发布会!!
先楫HPM6E00技术日 | 百人研讨共话工业应用创新及发展趋势
高朋满座,聚势工业以太网——EtherCAT技术应用峰会暨先楫半导体HPM6E00新品预览

先楫半导体HPM6E00芯片成功点亮并顺利完成第一阶段验证
工业芯标杆,邀您来围观——先楫HPM6E00新品上市在即
先楫HPM6E00新品上市在即
国内首款内嵌ESC的高性能微控制器,先楫半导体HPM6E00全面上市
先楫半导体高性能微控制器HPM6E00系列全面上市

CES 2025:先楫半导体发布高性能机器人MCU
先楫半导体发布高性能HPM6E8Y系列MCU
【强势上新】HPM5E00:EtherCAT运动控制MCU,先楫半导体再拓工业总线产品新版图
先楫半导体HPM6E8Y:先楫实时控制芯片驱动的机器人关节“芯”时代




评论