 相机增益的介绍
相机增益的介绍

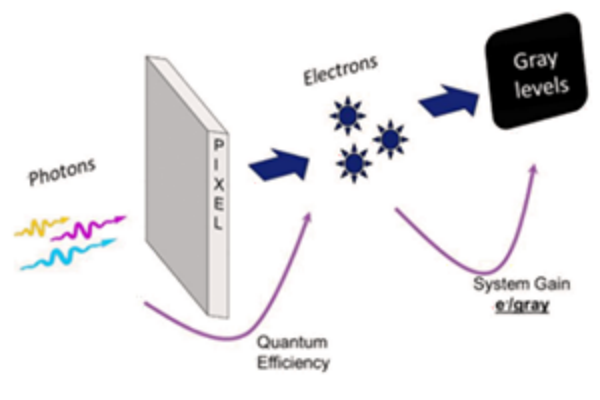
当传感器检测到光子时,像素内会释放光电子。在曝光结束时测量光电子数并产生数字。这称为模数单元 (ADU)或“灰度级”。然而,灰度级的数量并不等于检测到的光电子的数量。灰度级很重要的决定因素是相机的增益。
对于科学相机来说,释放的光电子和显示的灰度级之间存在线性关系。增益是该线性响应的梯度,以电子 (e – )/灰度级 (ADU)表示。例如,如果相机的增益为 6 e – /gray,则捕获信号的每 6 个光电子,显示值就会增加 1 个灰度级。
像素可以包含的最大信号还取决于相机的增益和位深度。对于 16 位相机,我们的最大灰度级值为 65,535 - 将此值(减去任何偏移值)乘以增益即可提供可用的全阱容量 - 我们可以检测到的光电子中的最大信号。
相机的偏移是指在检测到任何光子之前像素内的少量电子。这些决定了像素阵列的黑色电平(即最低电平)。这是为了确保不存在零值像素,因为无法从 0 值创建任何信息。由于全阱容量 也是传感器的属性,因此通常选择相机的默认增益值,使得传感器全阱与最大可显示信号相匹配。
EMCCD 相机的不同之处在于它们引入了额外的 EM 增益系数。通过乘以检测到的光电子,即使对于非常低的信号,也可以克服读取噪声,并通过该乘法除以所得增益值。因此,EMCCD在低光成像模式下具有非常高的增益,例如大约0.03 e-/gray。
如何计算增益
系统增益可以通过以下步骤使用均值方差测试来测量:
1、收集 100 帧平均图像(零积分暗图像)并将图像标记为“偏差”。
2、收集两个均匀照明图像并将它们标记为“flat1”和“flat2”。您的实验设置应该足够静态,以便图像“相同”,除了相机噪声和光子散粒噪声之外。
3、通过从一幅图像中减去另一幅图像(保留负值)来计算差异图像:diff = flat2-flat1。
4、计算差异图像中中心 100 x 100 像素的标准差。
5、通过对标准差进行平方并除以 2 来计算方差(方差按图像相加,因此差异图像的方差是 flat1 和 flat2 的方差之和)。
6、通过从其中一张平面图像中减去偏差来计算偏差校正图像,并将其标记为 corr:corr = flat 1 – 偏差。
7、通过计算 corr 图像中心 100 x 100 区域的平均值来获取平均照明级别。
8、均值除以方差等于增益:增益 = 均值/方差。
审核编辑 黄宇
-
传感器
+关注
关注
2577文章
55460浏览量
793778 -
相机
+关注
关注
5文章
1605浏览量
56018
发布评论请先 登录
AD9801:电子相机的高性能CCD信号处理器
双目立体视觉相机产品介绍

AD8337可变增益放大器:性能、应用与设计要点
工业视觉相机的应用有哪些

【SOA仿真5】SOA增益纹波计算

伺服电机增益详解
SOA增益饱和特性仿真分析
Zivid3D相机安装使用教程

GraniStudio:相机标定例程

工业相机与智能相机的区别


带增益的 RX 分集 FEM skyworksinc




评论