 GNSS仿真测试之三种常用坐标系与转换
GNSS仿真测试之三种常用坐标系与转换
作者介绍
在当今的全球导航卫星系统(GNSS)技术领域,仿真测试是评估和验证GNSS接收机性能的关键环节,全球导航卫星系统(GNSS)仿真测试是确保GNSS接收机和导航解决方案在实际部署前能够正确、可靠地工作的关键步骤。无论是为了确保定位精度、测试信号干扰的影响,还是评估在复杂环境下的导航可靠性,掌握正确的坐标系知识对于进行有效的仿真测试至关重要。
在GNSS仿真测试的领域,三种关键的坐标系构成了我们工作的核心:地心地固坐标系(ECEF)、地理坐标系(LLA,包括纬度、经度和海拔高度)以及本地水平坐标系(ENU,即东-北-上)。
本文不仅将详细介绍这三种坐标系的概念和特点,还将探讨它们在GNSS仿真测试中的具体应用。我们将学习如何在实际的仿真环境中使用这些坐标系,以及如何在不同坐标系之间进行精确的转换。这些转换对于确保仿真测试的准确性至关重要,因为它们允许我们将卫星的全球位置与接收机的局部视角相匹配。掌握这些坐标系的转换技能都将极大地提升您在GNSS仿真测试中的工作效率和成果的质量。
一、坐标系介绍
1.ECFF(Earth-Centered, Earth-Fixed)
ECEF坐标系是一个笛卡尔坐标系,一般中文叫做地心地固坐标系,其原点位于地球质心,X轴通过本初子午面和赤道的交点,Y轴位于赤道面上,通过东经90度,Z轴指向北极点。这个坐标系随着地球一起旋转,因此它固定在地球上。比如,鸟巢的ECEF坐标约为(-2175804.26,4383129.27,4077167.07),单位为米(m)。
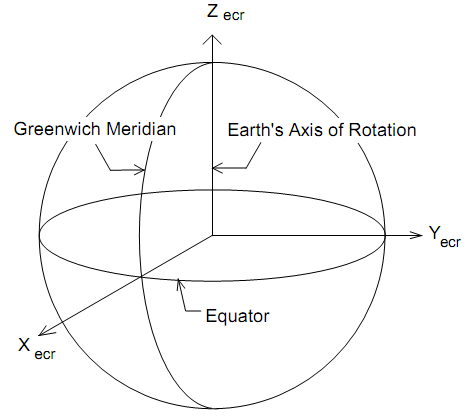
在ECEF坐标系中,地球上的任何点都可以用三个坐标值(X, Y, Z)来表示,分别表示该点相对于地球质心的位置。这个坐标系对于全球定位系统(GPS)和其他GNSS系统尤其重要,因为卫星的位置通常以ECEF坐标来表示,经常被用来精确描述卫星的位置和计算卫星与接收机之间的距离。
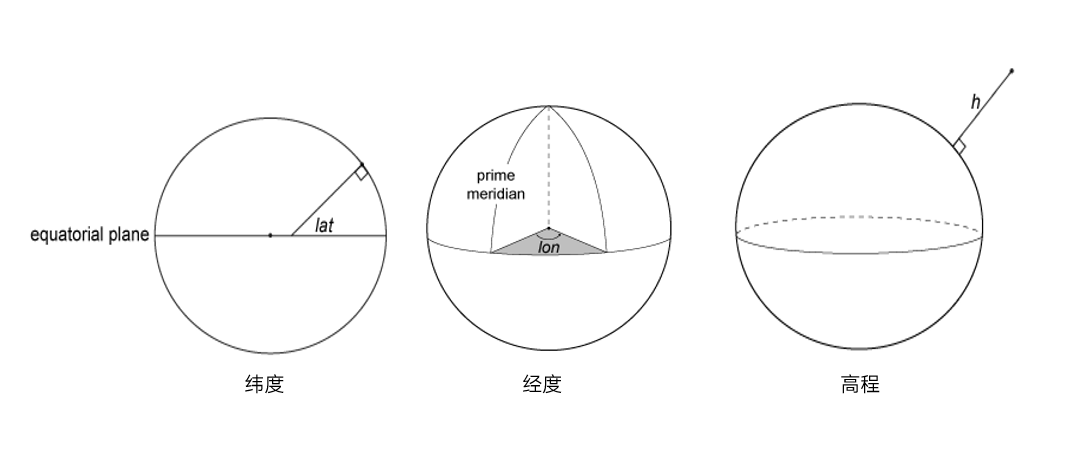
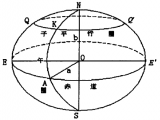
2.LLA(Latitude, Longitude, Altitude)
LLA坐标系是一个球面坐标系,一般称为地理坐标系,或根据三轴命名为纬经高坐标系,用于描述地球上某一点的位置。它由三个参数组成:
● 纬度(Latitude):指从赤道(0度纬度)到北极(90度北纬)或南极(90度南纬)的角度测量,它确定了地球表面上一个点的东西位置,范围为-90°~90°,
● 经度(Longitude):指从本初子午线(0度经度,通过格林尼治天文台)到东经或西经的角度测量,它确定了地球表面上一个点的南北位置,范围为-180°~180°(或0~360°),
● 海拔高度(Altitude):指从地球表面(通常是平均海平面)到某一点的垂直距离。这个高度可以是从参考椭球体(如WGS84椭球体)的表面计算出的几何高度,也可以是从平均海平面计算出的正高或从大地水准面计算出的正常高。
比如,鸟巢的LLA坐标为(39.99°,116.40°,50m)。
LLA坐标系是我们在日常生活中最常接触到的坐标系,如地图制作、导航和地理信息系统(GIS)中广泛使用,或用于将地球表面的位置转换为其他坐标系。在GNSS仿真测试中,LLA坐标系常用于定义接收机的初始位置和移动路径。
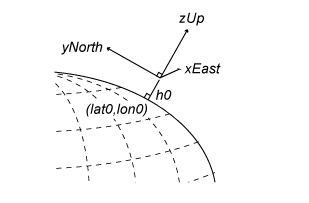
3.ENU(East-North-Up)
ENU坐标系是一个笛卡尔坐标系,是一个局部的本地水平坐标系,也称为东北天(东北上)坐标系。其原点位于地球表面上的一个特定点,通常与接收机的位置相对应。在ENU坐标系中,东轴(East)指向当地的东方向,北轴(North)指向当地的北方向,上轴(Up)垂直于水平面,指向天空。本地原点由大地坐标( lat0、lon0、h0 )描述。请注意,原点不一定位于椭球体的表面上。
若以鸟巢本身为原点,那么他的ENU坐标为(0,0,0),单位为m。
ENU坐标系常用于描述接收机附近的物体运动,如车辆的行驶轨迹或无人机的飞行路径,因为它提供了一个与接收机位置直接相关的坐标系。
4.三个坐标系的对比
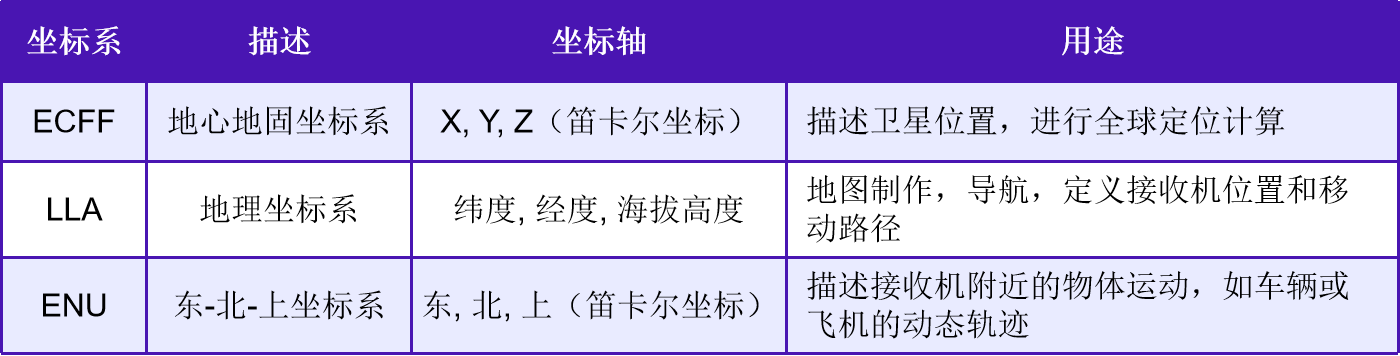
除此之外,还有一些常用的坐标系,例如NED坐标系(东北下坐标系)、AER坐标系(方位角-仰角-范围本地坐标系)等。
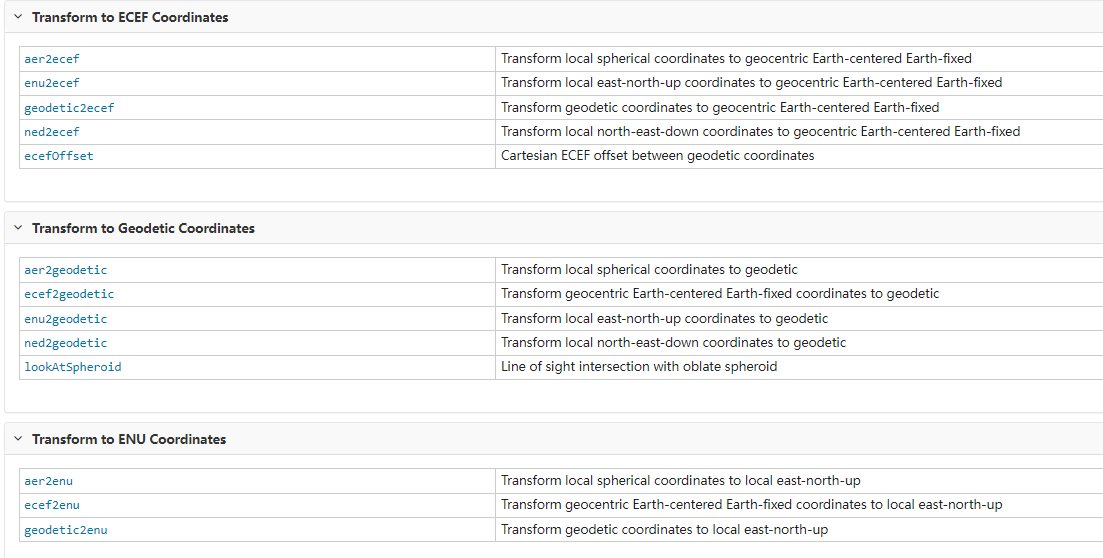
二、三个坐标系的转换
ECEF(地心地固坐标系)、LLA(地理坐标系)和ENU(东-北-上坐标系)之间的转换是通过一系列数学公式实现的。以下是这些坐标系之间转换的基本方法:
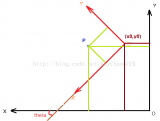
1.ECEF到LLA的转换:
这种转换涉及到从笛卡尔坐标(X, Y, Z)到球面坐标(纬度, 经度, 海拔高度)的转换。
● 首先,可以通过X和Y坐标计算出经度,通过Z坐标和地球的扁率计算出纬度。
● 然后,使用地球的参考椭球模型(如WGS84)来计算海拔高度。
2.LLA到ECEF的转换:
这种转换是从球面坐标到笛卡尔坐标的转换。
● 经度和纬度可以直接用于计算ECEF坐标中的X和Y值。
● 海拔高度和地球的参考椭球模型用于计算Z值。
3.ECEF到ENU的转换:
这种转换通常需要一个参考点,该点的LLA坐标已知。
● 首先,将参考点的ECEF坐标转换为LLA坐标。
● 然后,使用参考点的LLA坐标,通过一系列旋转和平移变换,将ECEF坐标转换为ENU坐标。
4.ENU到ECEF的转换:
这是ECEF到ENU转换的逆过程。
● 首先,根据参考点的LLA坐标计算坐标点的LLA坐标
● 经度和纬度可以直接用于计算ECEF坐标中的X和Y
● 海拔高度和地球的参考椭球模型用于计算Z值。
这些转换涉及到复杂的数学计算,包括球面三角学、旋转矩阵和椭球几何学。
在实际应用中,这些转换通常通过专业的数学库或GIS软件来实现,如PROJ、GDAL或MATLAB的地理工具箱等。
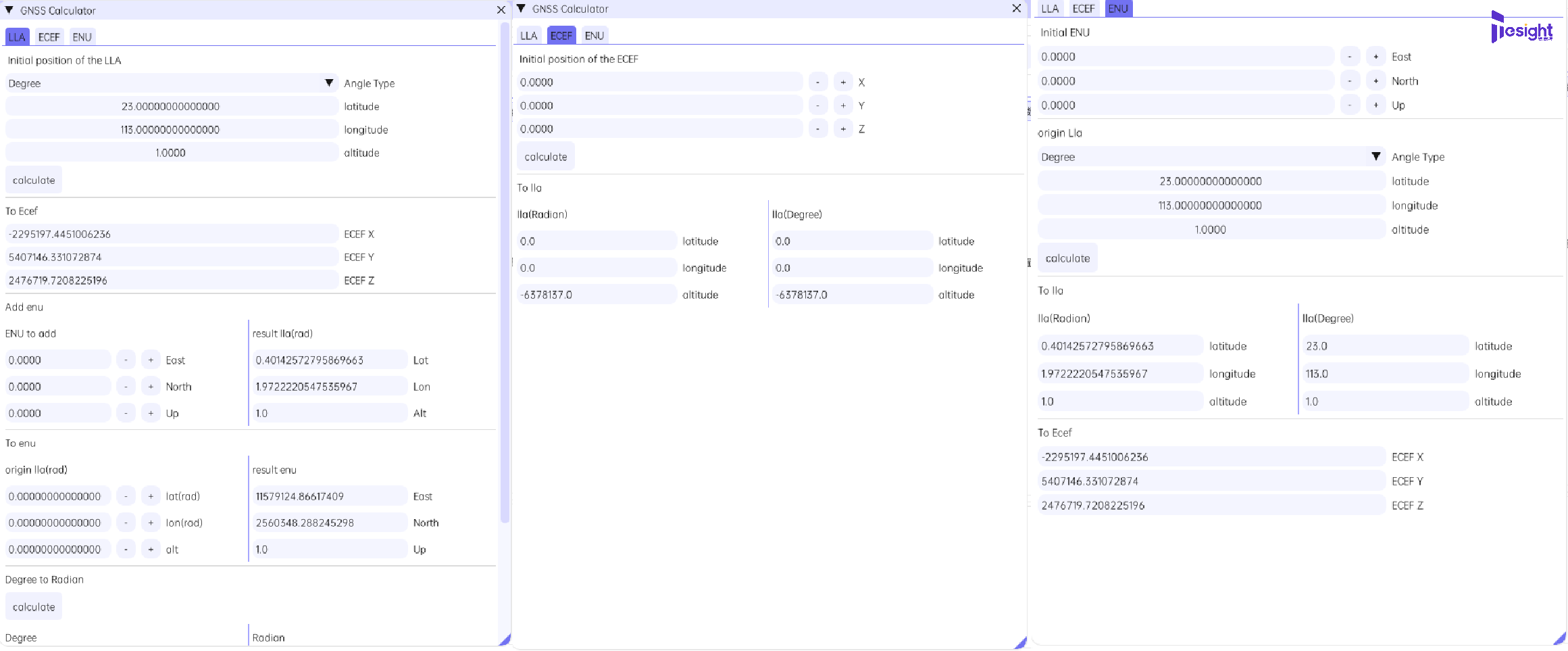
德思特AutoTest自动化测试平台为用户提供三种坐标轴的快速转换工具,简单输入现有坐标点即可完成对其他两个坐标系的转换。
审核编辑 黄宇
-
GNSS
+关注
关注
9文章
647浏览量
47355 -
仿真测试
+关注
关注
0文章
56浏览量
11253
发布评论请先 登录
相关推荐
【先楫HPM5361EVK开发板试用体验】06-基于MPU9250的姿态解算
应用卫星通信领域的一个坐标转换过程—机体坐标系与ENU坐标系的转换


机器人坐标系Launch文件解析
机器人坐标系管理TF跟随功能解析
机器人中都有哪些坐标系

IMU/GNSS与车体外参标定

德思特案例 | Skydel GNSS仿真引擎助力多所高校实现GNSS仿真测试教育

深度剖析机器人的四大坐标系

工业现场相机坐标系和机械手坐标系的标定
求老师指导,二维坐标系中,已知弧的起点,终点,半径, 计算出弧的圆心,起始角,弧度,外切矩形坐标,画出弧

世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系






 工商网监
工商网监
评论