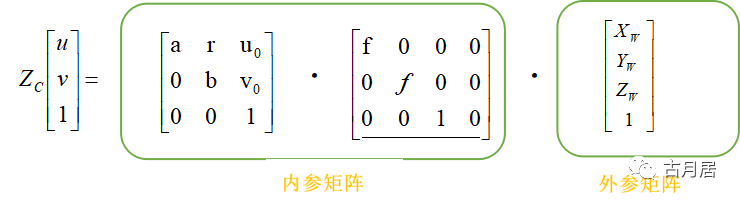
相机标定中所要确定的几何模型参数分为内参和外参两种类型。相机内参的作用是确定相机从三维空间到二维图像的投影关系。相机外参的作用是确定相机坐标与世界坐标系之间相对位置关系。
2022-10-12 16:04:18 2247
2247 应用矢量控制时其坐标变换是基础,相关文献与资料都有很多,matlab还有自带模块,但是一般都直接就给个变换矩阵让人晦涩难懂。
2023-07-10 15:15:041088 
坐标变换是一种线性变换,如无约束,变换就不是唯一的。在电机的系统分析中,所应用的坐标变换可有两种约束
2023-07-11 15:01:031329 
单目相机标定技术适用于被测表面曲率较小且需要获取实际数据的应用场合,比如食品、机械制造以及半导体等。
2023-07-21 11:32:272358 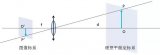
1.坐标变换公式简单推导一下,现有矩阵udq=C x uabc,idq=C x iabc,其中C代表坐标变换公式。(1)假设功率不变P=udqT x idq=uabcT x iabc=CT x C
2021-08-27 07:42:23
分析PWM整流,逆变装置时,经常会用到旋转坐标变换这个分析方法起因是交流侧的量都是时变的交流量,不易控制所以书上可以看到对三相坐标变换有如下的描述将三相对称静止坐标系(a,b,c)转换成以电网基波
2017-10-25 14:04:53
一、坐标变换1.1. 三相静止坐标系(abcabcabc)和两相静止坐标系(α/β\alpha/\betaα/β)之间的变换根据图中所示abcabcabc坐标系和αβ\alpha\betaαβ坐标
2021-08-27 06:18:07
进行傅里叶变换得到的波形图中,怎么把横坐标对应的点数变成频率啊? 求各位大神指导!!!!
2013-07-18 10:15:51
首先坐标系转换的变换矩阵(没有坐标系矩阵变换的概念可先百度)如图:
2019-06-20 18:34:32
Halcon旋转标定固定相机,从下往上拍照,计算产品到标准位置的偏差,如果产品有角度偏差,那就要额外减去旋转产生的X、Y偏移,都说取点拟合圆,圆心就是旋转中心点,可是我拟合出来的圆心转换成机器人
2021-11-09 15:36:24
几篇张正友标定方法的英文原文,不少朋友看过张正友标定方法,这里提供他的英文原文。喜欢看英文文献的,以及愿意更深入理解matlab中相机标定工具箱的朋友可以参考。
2018-05-04 14:43:25
(或者键入选项 A);请点取坐标标注方向: 拖动光标定义引线方向,点取标注引线结束点。坐标点还可以在命令行中选择 A 选项,通过键盘输入完成,注意本命令中以米单位与总图坐标顺序键入。请输入坐标标注点或
2021-03-11 13:38:10
``【课程推荐】龙哥手把手教你学LabVIEW机器视觉设计教程请问哪位大神有Labview机器视觉相机标定的程序文件,麻烦分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
TF功能包能干什么?TF坐标变换如何实现?
2022-02-14 06:29:50
最近在用matlab进行标定,标定的结果能否直接用于labview进行坐标变换?
2014-10-04 19:51:23
相机标定不成功点击下一步没反应
2015-04-16 12:58:59
最近在做视觉,需要用labview做相机的标定,通过空间转换确定空间位置。视觉助手的标定只能标定内参数,没有办法做内外参数的标定,哪位大神给指导指导如何做一个标准的标定程序。
2017-04-24 16:08:44
约束条件,分别是变换前后的幅值和功率不变,幅值不变时得到的坐标变换矩阵的系数大小为2/3,而功率不变时得到的坐标变换矩阵的系数大小为sqrt(2/3).另外,值得注意的是在Clark变换过程中我们一般
2018-09-16 13:02:18
的解耦,利用两相坐标系,可以解决电机矢量控制问题。图一:三相静止坐标系与两相静止坐标系转换在三相静止坐标系中,为ABC三相电源矢量的矢量和,其在ABC轴上的投影分别为:02park变换推导(两相静止坐标
2021-08-16 13:42:11
是左右相机拍摄同一块圆形标定板的图像,并根据labview自带的圆点标定板圆点检测函数得到圆点坐标。下图是加载圆点标定板标定结果后,加载一对图像后,鼠标移动到左图上显示的距离信息。程序框图分3部分
2021-09-27 16:52:18
主要内容本文提出了一种不依赖于棋盘格等辅助标定物体,实现像素级相机和激光雷达自动标定的方法。方法直接从点云中提取3D边特征,一避免遮挡问题,并且使用了精确度更高的深度连续边。文中首先指出:以下四种
2021-09-01 07:42:19
单元换算到实际单位时的大小,然后根据像素坐标计算实际坐标,那么如果我用相似三角形的原理的话,是不是可以结合它来使用而不进行相机标定求各位迷惑的和搞清楚的人都说一下你们的见解!!谢谢!!
2016-05-20 15:49:27
图像标定好以后相机检测到某个点想定位到这个点怎么把图像坐标转换到世界坐标呢求指教
2016-04-28 16:41:55
,如何使用大标定板统一坐标来做高精密测量。采用一块维视图像大标定板来统一各个相机的坐标,每个大标定板中有若干小标定板,各个小标定板间的位置关系都是已知的,各个相机都能拍摄到一个小标定板。通过各个小标定板可以
2015-11-18 11:05:45
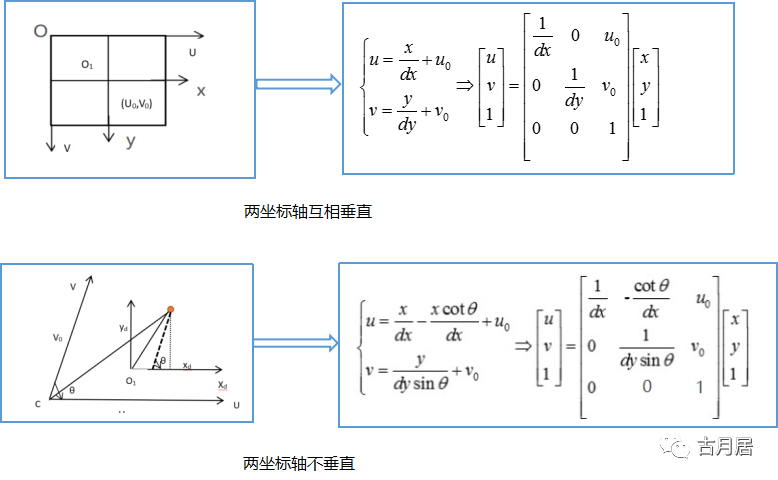
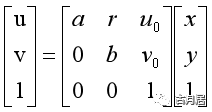
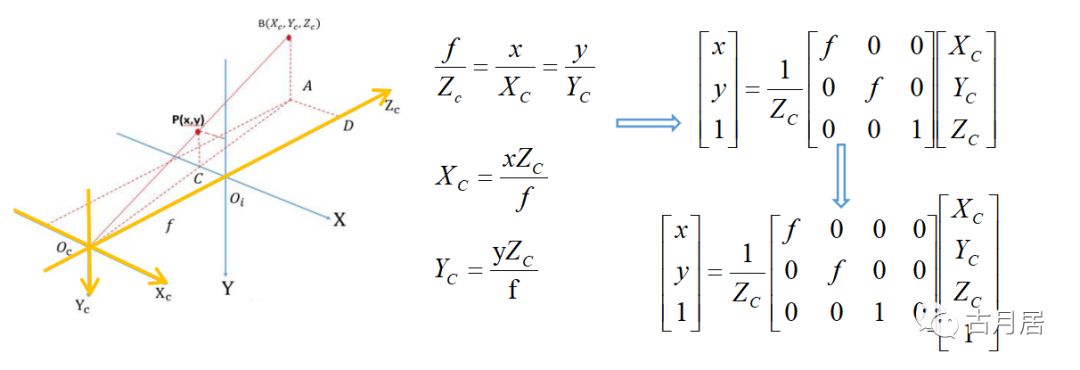
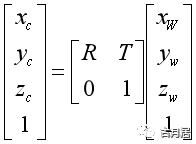
系,XOY为以毫米为单位的图像坐标系。 图像中某点在以毫米为单位的图像坐标系中的坐标与其在以像素为单位的图像坐标系中的坐标的变换关系如下: 空间某点在世界坐标系中的坐标与其在摄像机坐标系中的坐标变换关系如下
2019-06-04 08:00:00
在电机仿真过程中,需要采用坐标变换理论把交流电机通过坐标变换理论等效为直流电机进行解耦控制,Park(abctodq0/dq0toabc)变换和Clark(abctoαβ/αβtoabc
2021-09-03 06:24:55
本人正在用LABVIEW进行视觉开发,LABVIEW的范例都看了,Calibration范例也看了,还是不明白具体标定的实施步骤,怎样把图像坐标系的像素点转化为物理坐标,怎么样知道相机成像的平面上单位距离占用多少像素(Pixels),求大神指引下啊,最好能把步骤1、2、3、4...列出来
2017-12-24 20:16:24
小白求助,求相机标定示例
2021-11-22 07:43:41
上一阶我们讲了异步电机的四大方程,发现异步电机模型非常复杂,中间各个变量相互耦合,我们希望通过更直接,更简单的方法来分析,这里将引出坐标变换的概念。首先要提出等效的前提,其实就是强调能量守恒:磁势
2021-09-03 09:19:51
,stereo VO中图像既可以是彩色的,也可以是灰度的 ),记录摄像头在t和t+1时刻获得的图像为It和It+1,相机的内参,通过相机标定获得,可以通过matlab或者opencv计算为固定量。输出
2019-06-08 08:30:00
在机器视觉中,怎么标定坐标原点啊,我用的图像匹配可以标定一个坐标原点,但是在不同的图像上会有偏移,怎么才能减小偏移呢。求大家指教一下
2013-01-18 15:53:54
波形图中的横坐标为时间怎么变换为频率?
2016-04-07 11:46:29
FOC控制有哪几种坐标转换?怎样在Matlab / Simulink中搭建仿真模型?
2021-09-22 06:07:33
有个项目要用视觉定位,视觉拍好产品之后,把产品的坐标发送到PLC,PLC再执行定位指令。现在查到的资料都没有涉及这一块,都是讲相机标定,而不是手眼标定。哪位有这方面的资料,怎么用labview实现手眼标定?
2020-05-28 14:42:35
提出一种无相机标定的立体图像对的极线校正新方法。该校正方法并不依赖基本矩阵F的精确求解,而是通过空间变换法分析校正前后图像点对应关系,依此分解并参数化描述极线变
2009-04-14 08:40:01 12
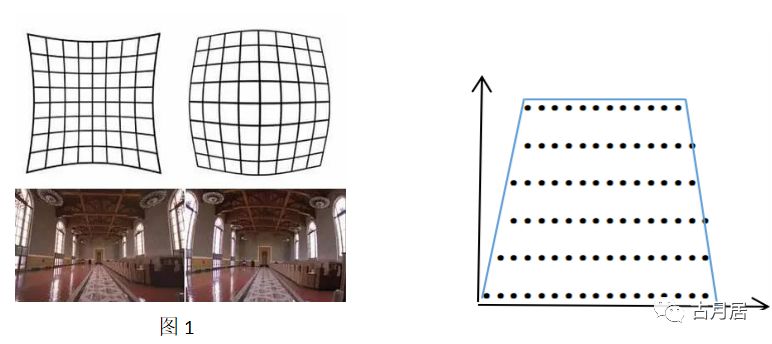
12 光学标定板应用领域宏诚光学玻璃系列标定板和陶瓷系列标定板是专为高校实验、研究单位项目研发和机器视觉集成商产品标定等等客户群体使用的常用标定工具,能够方便获得相机的标定数据。标定板作用:为校正镜头畸变
2022-09-20 08:14:32
双目标定是双目系统的关键技术,本文对双目系统标定进行理论分析,给出基于变换矩阵的坐标系变换关系。考虑实际情况,提出基于投影法及小波变换的双目系统标定方法,给出
2010-01-07 14:57:0916 matlab坐标变换
坐标变换
cart2pol 笛卡儿坐标变换为极坐标或圆柱坐标 cart2sph 笛卡儿坐标变换为球坐标
2008-06-18 14:47:502210 matrox mil开发资料:CALIBRATION相机标定模块
2015-12-10 16:32:068 什么是摄相机标定?摄相机标定方法的分类?感兴趣的小伙伴们可以瞧一瞧。
2016-09-22 12:04:450 dq坐标变换数学原理
2016-12-20 22:56:4819 坐标变换和矩阵变换的原理放在交流电机里头介绍比较容易理解,所以下面介绍的坐标变换和变换矩阵都以交流电机模型来说明。
2017-09-05 10:49:26329 我们首先介绍下计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系。以及他们之间的关系。然后介绍如何使用张正友相机标定法标定相机。摄像机标定(Camera calibration)简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵的过程。
2017-12-04 16:56:3517861 
OpenCV sample目录下自带两个与相机标定的cpp文件即:calibration.cpp和calibration_artificial.cppcalibration.cpp 是通过用户输入
2017-12-04 17:23:263427 
算法实现变得高效;同时,提出了带有双层金属球的校准靶,通过识别小球的投影数据来实现相机标定。在校准点验证实验中,可以验证经变换后的坐标的残余误差均不超过0. 002像素;在导航验证实验中,借助初步搭建的导航平台成功实
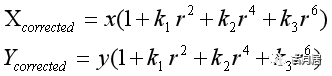
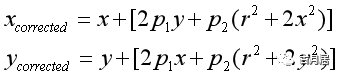
2017-12-14 15:31:305 针对张正友标定方法中相机内参数的求解可能陷入局部最优解的问题,考虑镜头的三阶径向畸变和二阶离心畸变,提出一种基于改进遗传算法的单目相机内参数优化标定方案。该方法可显著提高相机标定中内参数的精度,并能避免陷入局部最优。最后,实验验证了所提方案的有效性和可行性。
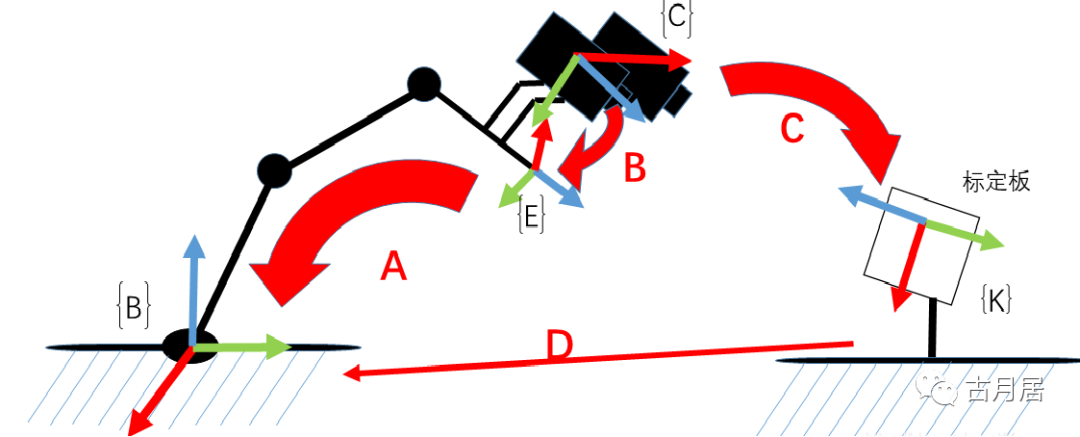
2018-01-05 16:11:491 针对借助激光跟踪仪标定机器人所涉及的坐标系统一问题,对基于空间几何法拟合建立的基坐标系与机器人理论基坐标系的转换关系进行了研究,提出了一种基于对偶四元数法的机器人基坐标系标定方法。利用指数积公式推导
2018-03-07 10:43:522 在机器视觉的测量中,我们得到的尺寸并不是我们真实的物体尺寸,而是像素值,那么如何将像素值转成我们需要表示的实际物体尺寸,此时,需要进行坐标的标定。
2018-12-29 13:56:334012 相机标定可以说是计算机视觉/机器视觉的基础,但是初学者不易上手,本文将给读者整理一遍相机标定的逻辑,并在文末回答评论区提出的问题。分为以下内容:
2019-06-01 09:54:153971 
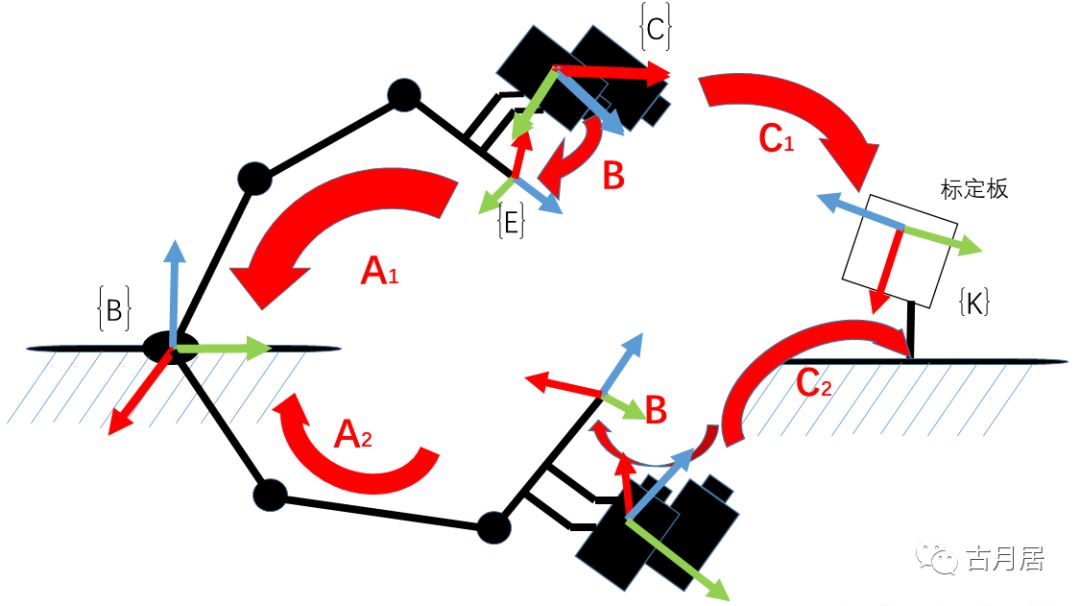
这种情况的标定过程实际上和相机和机械手分离的标定方法是一样的,因为相机拍照时,机械手会运动到相机标定的时候的位置,然后相机拍照,得到目标的坐标,再控制机械手,所以简单的相机固定在末端的手眼系统很多都是采用这种方法,标定的过程和手眼分离系统的标定是可以相同对待的。
2020-07-11 09:57:505357 
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,手眼标定等。
2020-08-28 11:42:4610854 
采用张正友提出的基于2D平面棋盘格的摄像机标定方法,利用Matlab摄像头标定工具完成相机参数的标定。
2020-08-31 10:04:124715 
转自:微信公众号AI图像 创建标定数据模型 你可以用算子create_calib_data创建一个标定数据模型,指定相机和标定物体的数量。当用一个相机的时候,你也用一个单独的标定物体。 然后,你要做
2020-10-31 11:31:383434 
张正友相机标定法是张正友教授1998年提出的单平面棋盘格的相机标定方法。传统标定法的标定板是需要三维的,需要非常精确,这很难制作,而张正友教授提出的方法介于传统标定法和自标定法之间,但克服了传统标定
2020-12-31 10:06:195420 
相机标定在计算机视觉领域中有着至关重要的作用。绝大多数相杋标定方法假设相机为针孔模型,且需要良好聚焦的图像来保证相机內外参估计的准确性。然而,这些条件会受到相机景深的影响。在薄透镜相机模型假设
2021-04-21 15:05:5716 组成的多轴系统、Scara四轴机器、六轴机器人(在运行过程中保证几个自由度不动,运行即可) 一、 标定介绍 1. 标定模型A:相机固定(夹具不旋转) 夹具夹取产品或者标定块,选取一个特征,开始进行标定 X轴、Y轴移动一个位置,记录轴的物理坐标
2021-05-08 10:05:1834068 
9个机械坐标,相机也得到9个像素坐标,然后标定3.计算机器人的旋转中心机器人抓取工件分别旋转三个角度摆放到相机视野内,相机可以得到三个坐标值,通过三个坐标值拟合圆获得圆心坐标即为旋转中心4.相机通过公式计算得出最终的输出结果(rx0,
2021-05-27 14:15:533251 
,在该范围内随机生成参数作为初始值,然后以最小平均误差为准则,利用灰狼粒子群优化混合算法,建立目标函数,进一步求解相机的内外参数。研究结果表明,该算法求解结果准确、稳定,可重复操作,可以有效地提髙标定精度,结果好于
2021-05-31 11:09:515 在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2022-06-21 11:12:347612 在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,手眼标定等。
2022-08-18 15:54:375457 文章提出一种基于单应性变换原理的交通监测毫米波雷达与摄像头标定方法,该方法只需提取交通监测场景中目标在两传感器中对应的坐标点对就能解算出传感器间的转换关系。相比传统方法对摄像头内参数、传感器自身以及传感器
2022-10-27 14:15:111458 来自CMU Robotics Institute, 已知最早3D Laser与相机标定的工作(2005年),基于matlab的图形用户界面,进行激光雷达相机外参标定。
2022-11-10 14:59:262577 因为相机成像的模型比较复杂,所以依赖于一张图像来标定相机是不可靠的。但是我们可以把世界坐标固定在标定板上,通过转动和平移标定板来得到多幅不同的图像。
2022-11-22 10:34:053072 相机标定可以归纳为P−n−P(Perspective-n-Point)的问题,即已知三维物点坐标和对应的二维投影坐标,求解相机参数。由于镜头的畸变(径向和切向)带来非线性成像模型,一般求解方法分为两步:
2022-12-21 09:52:30858 在这里我们所说的双目标定是狭义的,讲解理论的时候仅指两台相机之间相互位置的标定,在代码实践的时候,我们才说完整的双目标定。
2022-12-28 17:17:241978 此方法采用相机和被测物之间的相对运动来统一相机的坐标,相机和被测物只要一方运动即可,记录各个位置的坐标,然后通过数学运算来统一坐标。通常情况下是相机位置固定,被测物通过机械手等运动装置进行移动,然后把相机坐标系统一到机械手等运动装置的原点。
2023-02-03 15:41:541820 世界坐标系,相机坐标系,图像物理坐标系,像素坐标系之间的关系。
2023-03-08 16:44:002118 以无刷直流电机为例,在矢量控制中,因为需要从转子角度对电机进行控制,所以需要对定子三相电流进行坐标变换,在旋转坐标系下对转矩和磁场进行解耦控制。控制输出需经过坐标反变换,在静止坐标
2023-03-08 14:51:510 此方法采用一块大标定板来统一各个相机的坐标,每个大标定板中有若干小标定板,各个小标定板间的位置关系都是已知的,各个相机都能拍摄到一个小标定板。通过各个小标定板可以标定每个相机的内部参数和外部参数,每个相机的坐标都可以转换到各个小标定板的坐标系上,从而统一各个相机的坐标。
2023-03-13 10:06:371506 为了简化自然坐标系下三相 PMSM 的数学模型,PMSM控制算法中采用的坐标变换通常包括静止坐标变换( Clark 变换)
和同步旋转坐标变换( Park变换) 。各坐标系如下图所示,其中,ABC
2023-03-15 10:47:371 相机标定是通过输入带有标定patter的标定板来获得相机参数的一个过程。实际的光学成像是一套非常复杂的过程,从三维世界投影到相机中的二维图像。相机标定就是用抽象的数学模型来表示这个复杂的成像过程。
2023-06-01 14:36:46430 
obj_points、img_points_left和img_points_right分别是存储每个标定图片对应的物理坐标系下的角点坐标、左相机的像素坐标和右相机的像素坐标。这些变量同样在后续的相机标定和立体匹配中用到。
2023-06-08 16:28:53932 
相机标定是计算机视觉最基础也是至关重要的一个问题,标定的精度够不够决定了以后的校正、去畸变、配准、计算三维坐标、恢复三维模型能否进一步做下去。
2023-06-26 09:51:30312 通过Clarke变换后所得到的α、β静止坐标系上的分量,我们要注意现在得到的还是正弦信号,既不是阶跃信号,也不是斜坡信号。
2023-06-30 17:43:02559 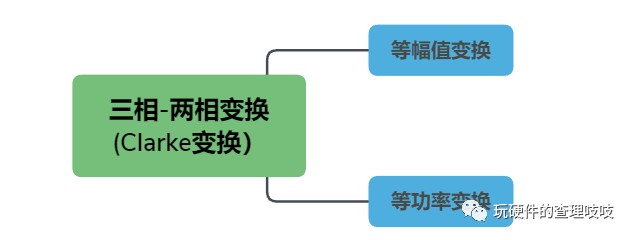
相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标系之间的装换关系。
2023-07-03 10:30:114080 
首先,课程介绍了双目相机标定的基础知识。我了解到双目相机是由两个相机组成的系统,通过同时拍摄目标物体的两个视角来获取三维信息。
2023-07-03 14:25:061922 
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,手眼标定等。
2023-07-03 15:45:152286 
磁场定向控制中使用到的坐标变换主要有Clark变换、Park变换、Anti-Park变换。
2023-07-07 15:41:421192 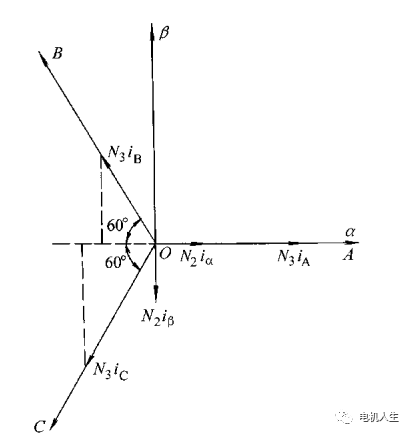
在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2023-08-03 09:38:04832 
张正友标定方法是一种经典的相机标定方法,目前是最受欢迎的方法之一。该方法通过一种机器学习的方法,利用大量匹配的数据点像素坐标、世界坐标,基于极大似然估计拟合得到一个最优解。
2023-08-03 10:59:12641 
对于摄像机标定问题已提出了很多方法,摄像机标定的理论问题已得到较好的解决,对摄像机标定的研究来说,当前的研究工作应该集中在如何针对具体的实际应用问题,采用特定的简便、实用、快速、准确的标定方法。
2023-08-04 12:54:171387 
选中Export Camera Parameters按钮,将计算得到的相关参数导入到Matlab中;若要进行更精确的标定,可在标定时考虑畸变误差或采用双目相机标定方法。
2023-10-09 10:51:50511 
这个逼近的过程就是「相机标定」,我们用简单的数学模型来表达复杂的成像过程,并且求出成像的反过程。标定之后的相机,可以进行三维场景的重建,即深度的感知,这是计算机视觉的一大分支。
2023-10-18 17:00:07476 
视觉系统一共有四个坐标系:像素平面坐标系(u,v)、图像坐标系(x,y)、相机坐标系()和世界坐标系()。每种坐标系之间均存在联系,那么如何通过图像像素坐标定位到世界坐标系的坐标,需要通过相机标定来解决,其中关键的算法部分在于坐标系转换,而变换则需要通过齐次坐标的表示方式来完成。
2023-10-30 10:24:32375 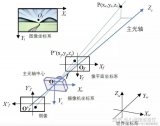
其中r是毫米像素比、(mm/pixel)就是一个毫米有几个像素,theta为两个坐标系之间的夹角,(x0,y0)为图像坐标原点到机械坐标原点的距离。
2023-11-12 09:42:18581 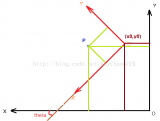
在选择标定板时,一个重要的考虑因素是它的物理尺寸。这最终关系到最终应用的测量视场(FOV)。这是因为相机需要聚焦在特定的距离上标定。改变焦距长度会轻微地影响对焦距离,这会影响之前的标定。即使是光圈的改变通常也会对标定的有效性产生负面影响,这就是为什么要避免改动它们。
2023-11-25 14:36:08415 
相机知道的是像素坐标,机械手是空间坐标系,所以手眼标定就是得到像素坐标系和空间机械手坐标系的坐标转化关系。
2024-03-18 09:44:1547 
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论