 伺服电机脉冲和总线方式区别
伺服电机脉冲和总线方式区别

伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。按控制方式可分为:脉冲型和总线型。
一、伺服电机脉冲方式
伺服电机脉冲方式是通过控制器向驱动器发送脉冲信号控制电机运动,由于每一次脉冲的频率和宽度是固定的,因此可以通过控制脉冲的频率和宽度来控制电机的运动状态。这种方式简单可靠,适用于需要高精度控制的场合,如数控机床、印刷机等。
优点:
1.控制精度高。每一个脉冲的频率和宽度都是固定的,因此可以实现高精度控制。
2.可靠性高。该方式结构简单,没有总线传输过程中可能出现的干扰和丢失数据等问题。
3.系统成本低。基于脉冲控制的伺服系统结构简单,成本低。
缺点:
1.控制灵活度低。该方式不能实现多轴协调控制,适用于单轴高精度控制场合。
2.布线复杂。每一个伺服电机的控制信号都需要独立引出,布线复杂。
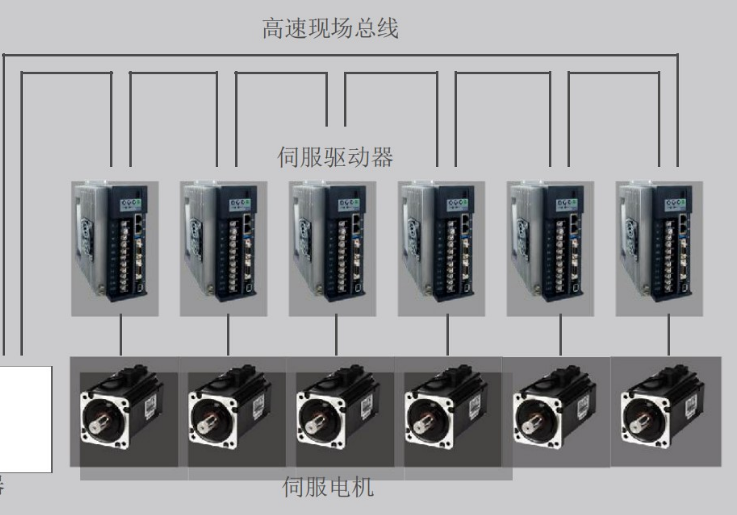
二、总线方式
总线方式是通过总线传输控制信号,实现对多个伺服电机的控制。该方式相对于脉冲控制具有更高的控制灵活性,可以实现多轴协调控制。总线方式适用于需要实现复杂运动控制的场合,如机器人、自动化生产线等。
优点:
1.灵活度高。可以实现多轴协调运动控制,适用于复杂运动控制场合。
2.布线简单。总线方式只需引出一根总线,布线简单。
缺点:
1.控制精度低。总线传输过程中可能出现干扰和丢失数据等问题,影响控制精度。
2.系统成本高。基于总线的伺服系统结构复杂,成本较高。
结论:
伺服电机脉冲方式适用于单轴高精度控制场合,控制精度高,成本低。总线方式适用于需要实现复杂运动控制的场合,具有更高的灵活性,但成本较高。根据不同的应用场合可以选择不同的控制方式。
『科瑞特自动化技术』专业提供工业自动化运动控制技术及解决方案!
---(激光)焊接、抛光、切割、直坐标机器人(桁架机械手)、等特种数控设备运动控制系统,(步进电机、伺服电机、驱动器、电源)。
审核编辑 黄宇
-
脉冲
+关注
关注
20文章
913浏览量
100222 -
总线
+关注
关注
10文章
3069浏览量
91996 -
伺服电机
+关注
关注
88文章
2211浏览量
61681
发布评论请先 登录
伺服位置控制,接收脉冲的几种形式

伺服电机编码器14根线、5根线、4根线的区别
伺服电机正余弦编码器的相位对齐方式

关于步进电机脉冲和步距角相关的问题

伺服电机的控制方式简述

派克Parker防爆伺服电机与普通伺服电机的区别


舵机与伺服电机的区别是什么?
伺服电机的三种制动方式有什么区别?

【技术揭秘】PCle-1E16的脉冲控制,如何实现电机的精准驱动?

伺服总线通讯协议有哪些?有哪些区别?
伺服电机中的回原点方式




评论