 康谋技术 | 自动驾驶多传感器数据融合方法
康谋技术 | 自动驾驶多传感器数据融合方法

近年来,深度学习技术在涉及高维非结构化数据领域展现出了最先进的性能,如计算机视觉、语音、自然语言处理等方面,并且开始涉及更大、更复杂的多模态信息问题。
不同传感器在进行同一实验任务时,针对产生的同一现象进行观测,采集的数据构成被测对象的多模态信息。多模态信息可以实现不同传感器之间数据互补,并在相同学习任务获取更丰富的特征,从而实现比单一模态更好的性能。
在自动驾驶领域,多模态数据通常包括安装在车辆上的多个传感器,包括雷达、立体可见光摄像头、红外摄像头、GPS等,为执行自动巡航,从传感器收集的异构数据用于学习许多相互关联但复杂的任务,如定位和测绘、场景识别、路径规划和驾驶员状态识别等。
大多数先进的融合方法集中于如何融合来自多模态空间的信息或特征。根据多模态信息的融合策略主要可以分为早期融合、中期融合和晚期融合。
一、多传感器数据融合处理方法
1、早期融合
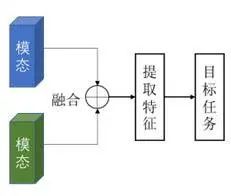
早期融合在输入端进行简单链接多模态数据组合,然后输入到特定的模型进行处理。LaserNet采用了这种融合策略,将三维的点云映射到二维图像上,采用全卷积网络进行概率预测,实现端到端的三维物体检测。
早期融合的方式能够保留最多原始数据的特征,但对于来自不同传感器的模态信息来说,这种融合方式计算量大,对设备运行要求较高。
2、中期融合
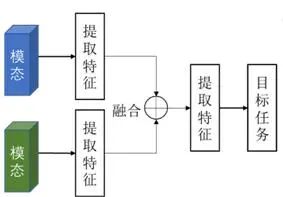
中期融合又称作是特征融合,需要对来自不同模态的数据进行特征提取,并对特征图进行融合操作后输入到目标任务中进行处理。通过ROI池化的方式将二维图像和点云鸟瞰图、前视图特征整合到同一特征尺度进行融合,并构建两个子网络进行多视图区域特征融合,并在不同路径中间层中交互特征,实现了自动驾驶场景下高精度的三维物体检测。
中期融合的方式能够有效减少模型的数据输入,能够有效整合来自不同模态的深层特征。
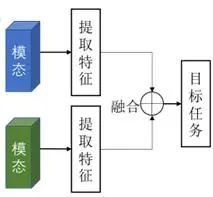
3、晚期融合
晚期融合(决策融合)针对每种模态的目标任务结果进行决策投票,比其他两种融合策略更为直观,能够有效地促进多模态之间的协作,避免因为传感器失效而对最终任务结果造成严重影响。
晚期融合由于需要对不同模态的数据进行处理和任务执行,其任务完成质量受到单一模态影响较大,同时也存在计算开销大的问题。
二、aiSim仿真模拟平台
作为一款端到端的自动驾驶仿真模拟工具,康谋aiSim仿真模拟平台能够提供现实世界中难以捕捉的场景和自动驾驶过程中的边缘案例,具有高可扩展性、高保真度的传感器模拟和环境模拟,能够扩充不同测试场景的数据广度和深度,有效提升ADAS/AD算法的能力。

传感器是环境感知系统的核心,自动驾驶车辆需要通过传感器获知周围的环境信息。康谋aiSim设计了基于物理原理的传感器模型,能够全面准确的模拟条件和交互环境。传感器模型库包括相机、激光雷达、雷达、超声波传感器等。
高度可扩展框架能够实现在多个GPU上实现分布式光追渲染,实时仿真高度复杂的多传感器配置。
具有污泥遮挡、冷凝水雾遮挡、镜头色差、镜头炫光等多种相机退化和镜头失真情景。
支持新传感器模型配置和设计,并快速测试其感知性能。相机、激光雷达和雷达视场可视化有助于确定传感器在车辆上的最佳安装位置。
如您对上述产品感兴趣,
欢迎联系康谋自动驾驶团队了解更多信息。
我们将竭诚为您服务!
期待与您的交流!
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55821浏览量
795463 -
仿真
+关注
关注
55文章
4568浏览量
138821 -
adas
+关注
关注
311文章
2361浏览量
212242 -
数据融合
+关注
关注
0文章
47浏览量
10688 -
自动驾驶
+关注
关注
795文章
15057浏览量
181994
发布评论请先 登录
格罗方德传感器融合方案助力实现更安全的自动驾驶

自动驾驶传感器前融合与后融合技术上有何区别?

自动驾驶多传感器前融合,到底提前融合了什么?

康谋新闻 | 康谋与Coppelia Robotics正式建立合作伙伴关系!

自动驾驶场景生成方法及优选方案:康谋aiSim 3DGS方案重塑行业标准
自动驾驶仿真软件推荐:康谋aiSim——ISO 26262 ASIL-D 认证的高保真选择
如何设计自动驾驶传感器失效检测与容错策略?
自动驾驶BEV Camera数据采集:时间同步技术解析与康谋解决方案

自动驾驶数据采集时间同步指南:方法、挑战、场景与康谋解决方案
L4级自动驾驶数据采集系统首选——康谋科技DATALynx ATX4 & BRICK系列全解析
康谋新闻 | 实力认证!康谋aiSim荣获ASAM“自动驾驶仿真技术奖”
康谋新闻 | 康谋加入ASAM组织,全球首个ASIL-D认证自动驾驶仿真平台aiSim引领安全新标杆

康谋分享 | 基于多传感器数据的自动驾驶仿真确定性验证

自动驾驶汽车是如何准确定位的?




评论