 四旋翼无人机飞行原理【其利天下无人机方案开发】
四旋翼无人机飞行原理【其利天下无人机方案开发】

近年来,无人机凭借其在多个领域的便捷应用,掀起了一场迅猛的发展潮流。尤其在当今世界的多场战争中,无人机的崭新战术运用达到了淋漓尽致的高潮,成为军事领域的璀璨之星。
 其利天下无人机
其利天下无人机无人机行业的近年蓬勃发展,宛如一片璀璨的新星汇聚成的辉煌星空。创新和科技的融合将无人机推向生活的前沿,成为引领时代的先锋。这是一场风起云涌的科技巨变,为我们描绘出了一个崭新而引人入胜的无人机时代。
下面我们针对生活中常见的四旋翼无人机的飞行原理做个基础的介绍。
一:四旋翼无人机的两种结构模型介绍
一般情况下,根据四旋翼无人机上马达分部的相对位置将四旋翼无人机分为如下两种结构模式
“×”字模式: Pitch和 Roll与1,3、2,4两组电机呈 45°夹角 。
“十”字模式: Pitch对应2,4电机的对轴,Roll对应1,3电机的对轴,夹角为0。
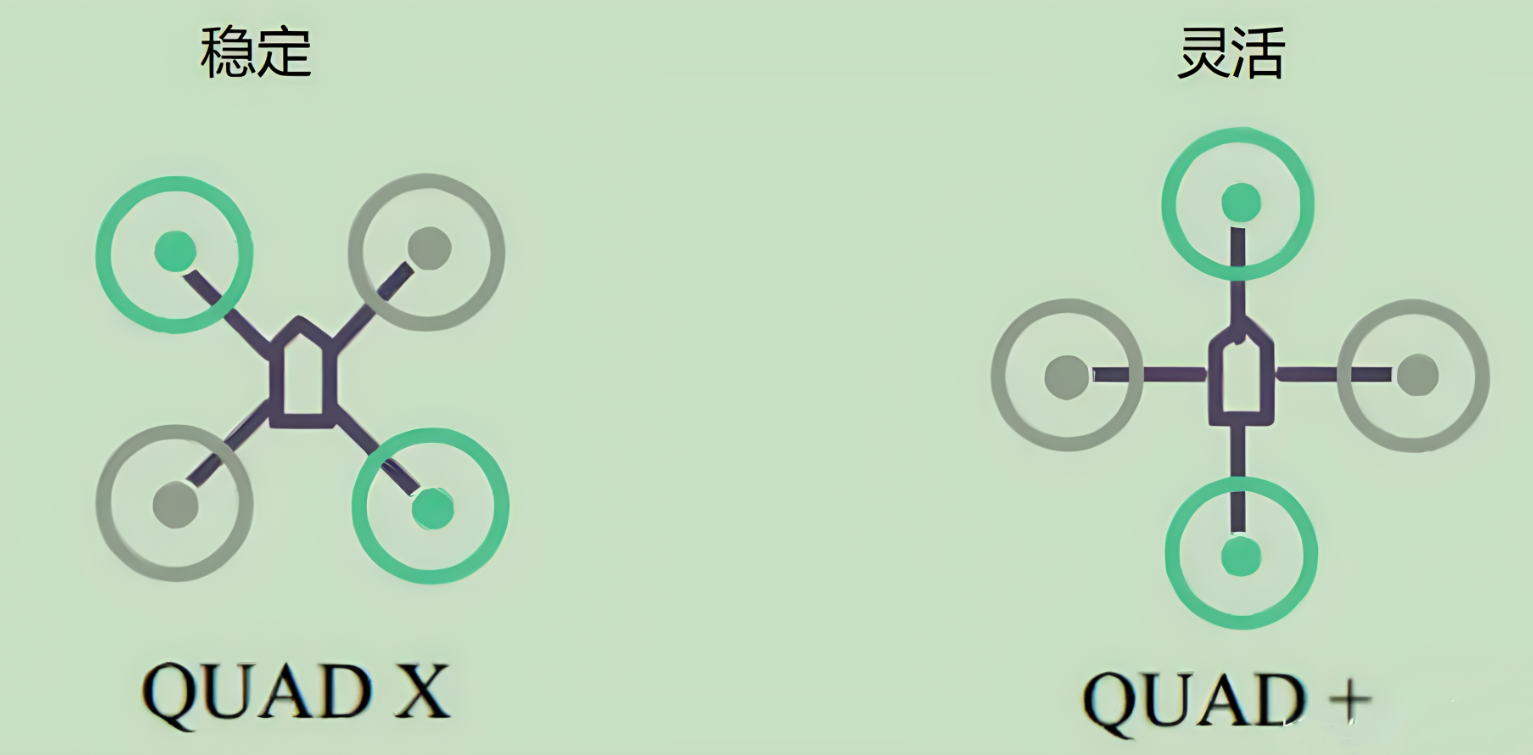 四旋翼无人机结构模式
四旋翼无人机结构模式一般的无人机基本都采用“X”字模式的结构。“X”型无人机优点是控制灵活,同样是俯仰运动中,“x”型无人机需要控制四个电机;具体表现为,前两个电机转速同时增大(减小),后两个电机转速同时减小(增大)。因为其运动是四个电机转速同时变化,运动(俯仰运动)的合力来源于四个电机(“+”型只有前后两个电机提供力),所以其运动的加速度更快,运动更加灵活。但是同样,控制四个电机使飞行器稳定的难度要大于控制两个电机,所以控制难度高是“X”型无人机一个缺点。鉴于现阶段商业飞控,开源飞控都已经有很成熟的算法控制飞行器稳定飞行,且“X”型飞行器易于悬挂云台,所以市面上的四轴飞行器绝大部分都是“X”型或“H”型,很少看到有“+”型。
“H”型无人机类似于“X”型,这里就不过多赘述了。只讲其一个缺点,“H”型无人机因为物理结构问题,其飞行器的腰部很容易扭折,所以市面上的“H”型无人机都会对腰部进行加固,但是如果操作不当,还是容易损坏。
“+”型的四轴飞行器因为其电机布局和两个姿态角(俯仰角和翻滚角)重合,其控制难度较小。举个例子,“+”型飞行器想要进行俯仰运动时,只需控制前后两个电机的转速,左右电机转速保持不变即可,所以其控制飞行器稳定的难度较小,相对来说易于控制。
二:四旋翼飞行器的6个自由度介绍
四旋翼飞行器的旋翼结构如图a所示。飞行时,以1号电机为机头,3号电机为机尾,2号和4号电机分别位于机身的左、右侧。当飞行器平衡飞行时,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转以抵消电机在高速旋转时产生的陀螺效应和空气动力扭矩效应使飞行器发生自旋。四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),对每个自由度的控制我们都可以通过调节不同电机的转速来实现。下面逐个说明飞行器的各种飞行姿态。
(1)垂直运动
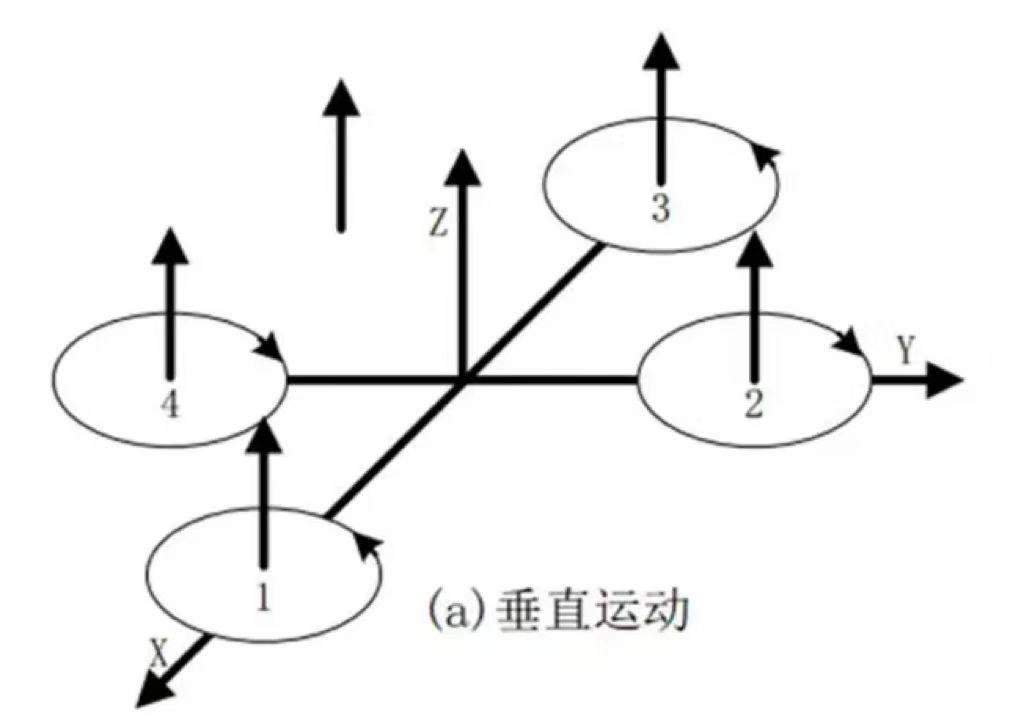 垂直运动时无人机受力分析图
垂直运动时无人机受力分析图如图a,1号和3号电机逆时针旋转,2号和4号电机顺时针旋转来平衡其对机身的反扭矩。如果同时增加四个电机的转速(图中各个电机中心引出的向上箭头表示加速,若箭头向下表示减速),每个电机带动螺旋桨产生更大的升力,当合力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机转速,四旋翼飞行器则垂直下降,当旋翼产生的升力等于飞行器的自重且无外界干扰时,飞行器便可保持悬停状态。
(2)俯仰运动
如图b所示,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变(图中各个电机中心引出的向上箭头表示加速,若箭头向下表示减速,没有箭头表示速度不变)。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕Y轴旋转(方向如图b所示)。同理,当电机1的转速下降,电机3的转速上升时,机身便绕Y轴反方向旋转。实现了飞行器的俯仰运动。
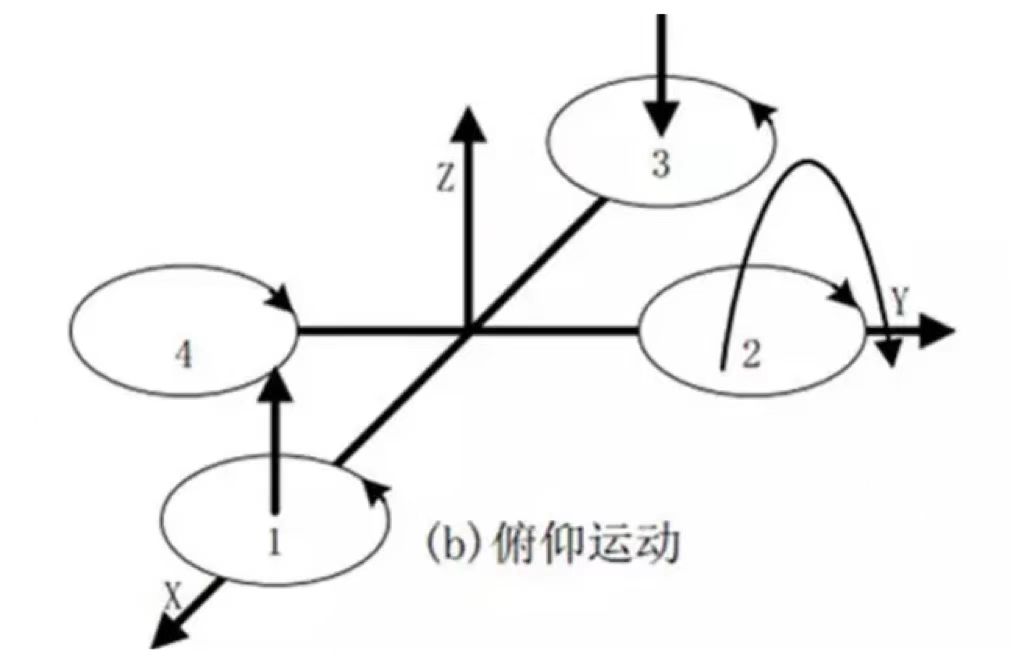 俯仰运动时无人机受力分析图
俯仰运动时无人机受力分析图(3)滚转运动
与图b的原理相同,在图c中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕X轴旋转(正向和反向),实现飞行器的左右滚转运动。
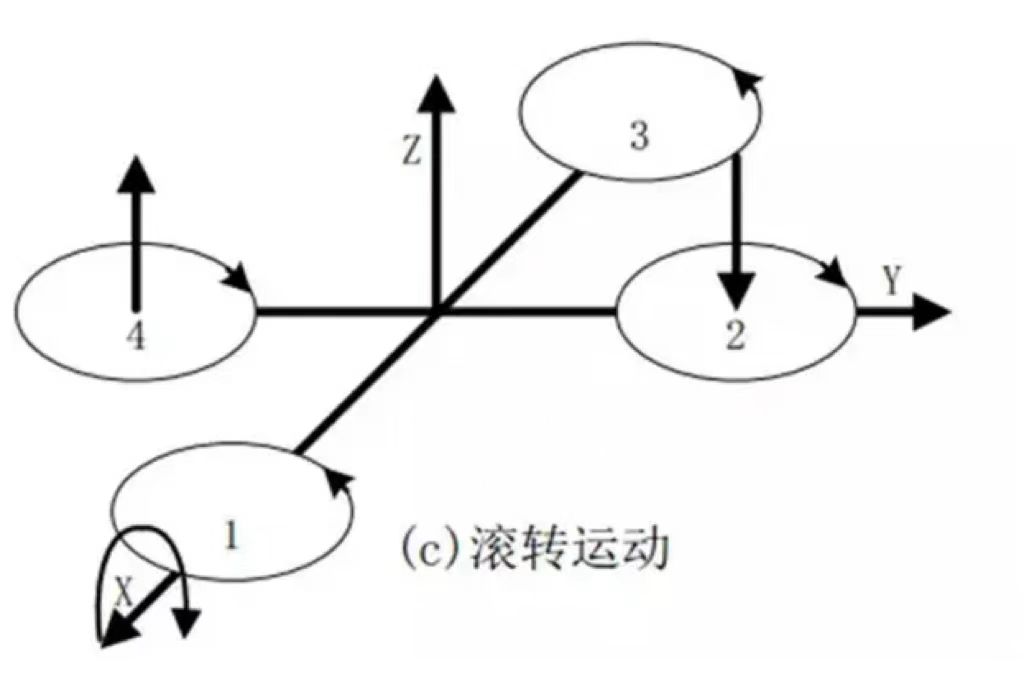 滚转运动时无人机受力分析图
滚转运动时无人机受力分析图(4)偏航运动
如图d所示,四旋翼飞行器偏航运动就是绕自身垂直轴Z轴旋转,可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩。为了克服反扭矩的影响,可使四个旋翼中的两个正转,两个反转,且对角线上的电机转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。
在图d中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在不平衡反扭矩的作用下绕Z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
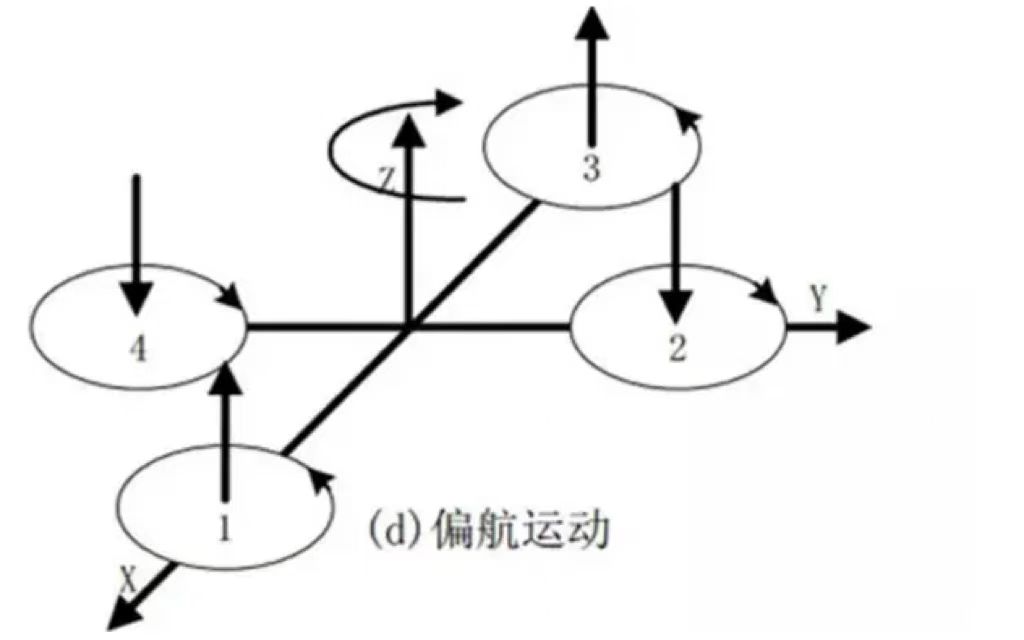 偏航运动时无人机受力分析图
偏航运动时无人机受力分析图(5)前后运动
如图e所示,增加电机3转速,使尾部拉力增大;相应减小电机1转速,使头部拉力减小;同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图b的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动(向后飞行与向前飞行正好相反)。当然在图b,图c中,飞行器在产生俯仰、翻滚运动的同时也会产生沿X、Y轴的水平运动。
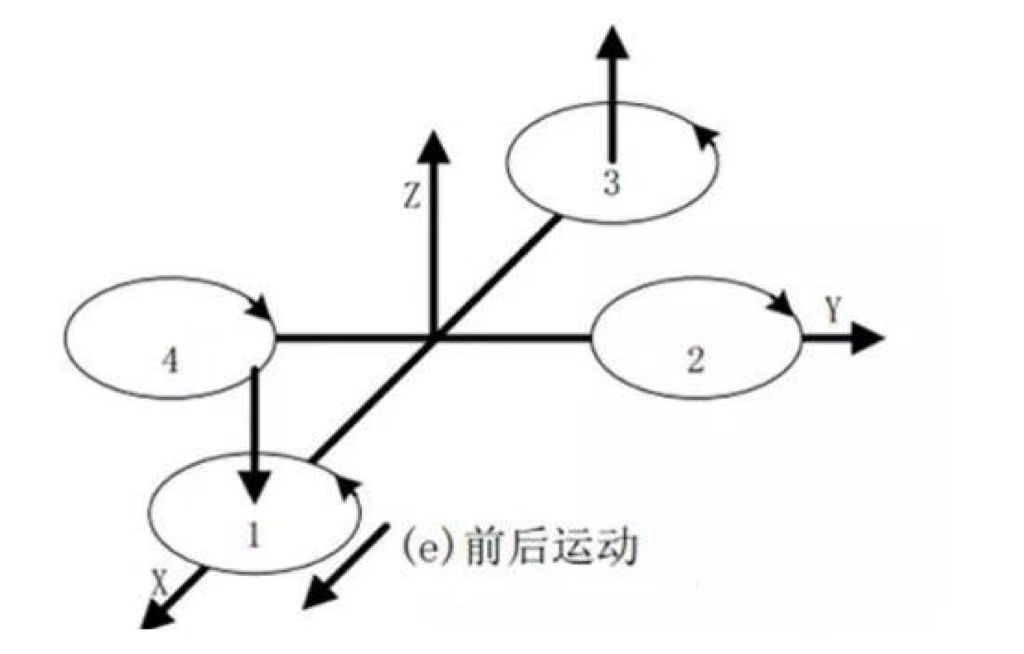 前后运动时无人机受力分析图
前后运动时无人机受力分析图(6)侧向运动
在图f中,由于结构对称,所以侧向飞行的工作原理与前后运动完全一样。
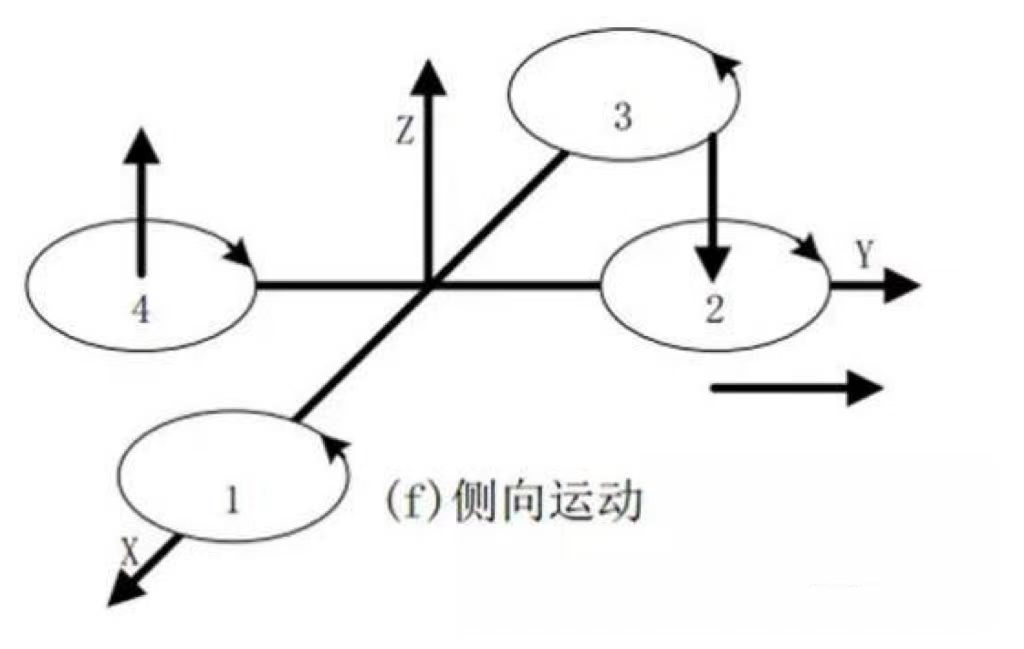 侧向运动时无人机受力分析图
侧向运动时无人机受力分析图 -
无人机
+关注
关注
237文章
11452浏览量
197183 -
MCU板
+关注
关注
0文章
27浏览量
6735 -
人工智能算法
+关注
关注
0文章
62浏览量
5822
发布评论请先 登录
四轴无人机控制核心丨笙泉新品(CGF062A) 融合MCU与MDE优势, 实现稳定高效的飞行表现
无人机飞行试验包括哪些方面?具体操作步骤是什么?需要哪些设备

2026新型无人机拦截反制AI模组

什么是无人机抗风能力?多旋翼抗风测试的全流程解析

请问多旋翼无人机单个电机故障怎么排查问题?
陀螺仪在无人机中的应用:无人机精准飞行的关键保障

无人机智能巡检系统:现代化运维的空中解决方案
翼辉信息DUP产品如何助力无人机完成智能化飞行

科普|无人机反制枪介绍

IMU 能为无人机提供什么数据?
低空物流:无人机开启未来配送新篇章
石英晶振在无人机领域的应用

使用 Betaflight 和树莓派实现 FPV 无人机自主飞行!

晶振化身空中交警,为无人机飞行保驾护航




评论