 基于树莓派RP2040的解魔方机器人,7秒还原三阶魔方
基于树莓派RP2040的解魔方机器人,7秒还原三阶魔方

话说,转魔方真真是特别解压的事情!虽然未必能如高手那样胸有成竹“咔咔咔"几下,行云流水间就还原。但,谁还不会“抠籽归位”大法呢?不过,当有人为你递上一个不知经历了什么的神奇魔方,又满怀期待地望着你,是时候亮出工程师的魔法神器了。
今天特别分享@爱跑步的小何大佬的开源佳作——三阶魔方还原机器人。
三阶魔方还原机器人
- 开源分享-

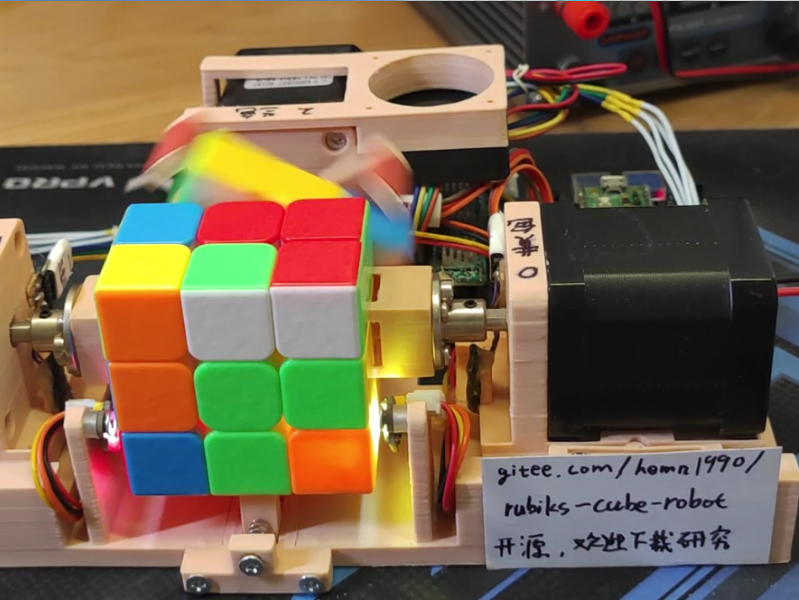
这是一款基于树莓派RP2040单片机设计的三阶魔方还原机器人,控制和魔方求解都使用单片机完成。对于随机打乱的三阶魔方,平均还原步骤数在21步左右。
当前V2.0版本,可实现7秒还原三阶魔方。
全部资料现已开源,含原理图和PCB、单片机源码(C语言)、结构图(openSCAD格式/STL格式)、主要器件BOM等。
1
项目实现原理
本项目无需摄像头,使用两个颜色传感器把所有棱块和角块的颜色扫一遍,用降群法寻找22步以内的求解方式,然后按照解出的结果还原。
慢动作来看下:
注意:按照一定规律旋转魔方,使所有的面都经过颜色传感器至少一次。除了棱块和角块,还需要中心块的颜色信息,当前项目的结构扫描不到中心块,所以安装魔方时需要固定中心块方向。
2
项目实现要点
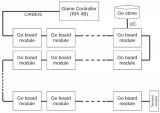
硬件设计——将RP2040单片机的GPIO,任意连接到步进电机驱动器、颜色传感器、霍尔传感器即可。除了SPI、UART,其他引脚只用了GPIO,未使用其他复用功能。
注意:霍尔传感器只能5V供电,RP2040单片机IO是3.3V,需要电平转换设计。FLASH是可选的,如果不使用FLASH,平均还原步骤数在32步左右。

结构设计——推荐使用ABS材料3D打印,喷嘴0.4mm,层高0.2mm,顶层5层、底层5层、外壳4圈、填充20%-40%,生成支撑。
固件编译——推荐使用Linux系统进行开发,可按照RP2040官方文档中的脚本搭建开发环境。相关源码及文件,参见最新开源资料链接。
3
项目成本参考
不算加工成本,单纯物料成本,一台200元左右。
主板上的主要物料:
PCB量少有免费途径,量大了估计一两块钱;三个散热器1.5元左右,晶振0.3元左右,Type-C座0.38元,RP2040单片机3.91元,三片HR4988 6.24元,W25Q16 0.9元,AMS1117 0.3元,CH224K 1.1元,W25N01 5.5元。其他料都很便宜,但是没法只买少量,最后都会剩很多。总成本应该在30元之内。

整机物料:
三个步进电机72元,带磁力魔方20元左右,两个方形锅磁9.4元,4010风扇7元,三个霍尔一两块钱,两个颜色传感器模块27元,一个法兰联轴器2.8元,铝条几块钱(如果能自己加工很便宜,如果没条件定制加工的话可能会非常贵,不如多3D打印几个合算)。ABS耗材280g左右,耗材本身换算下来10元左右,如果没有3D打印机去定制的话0.2元/g左右。其他小件不好算,也不贵。总成本应该在170元之内。
配件:
电源随便找一个就行,12-20V之间,建议2A以上,玩电子的基本上都有。如果是支持PD的Type-C充电器,插上也可以直接用。其他的接线时须注意正负。
4
最新开源资料
三阶魔方还原机器人项目全部资料开源——机械结构图、电路板原理图、电路板PCB、程序源代码、整机BOM,装配调试视频教程全都有。
-
传感器
+关注
关注
2577文章
55505浏览量
793963 -
机器人
+关注
关注
213文章
31444浏览量
223669 -
树莓派
+关注
关注
122文章
2082浏览量
110767
发布评论请先 登录
基于树莓派RP2040芯片的复古掌机开源项目介绍

基于RP2040的开源双通道无刷电机控制器介绍

创通联达携魔方派亮相2026高通边缘智能开发者生态大会
自制巡线解迷宫机器人(上)
在树莓派Pico上运用不同的并行化手段
deepin 25成功适配魔方派3开发板
工业机器人的特点
RP2040的工业级封装系统!

搭载树莓派CM5:Sfera Labs 工业控制器!
树莓派分类器:用树莓派识别不同型号的树莓派!
【干货分享】RP2040 + Cyclone 10 FPGA PCB 设计
新视角解锁:树莓派“云”驾驶扫地机器人!
能够精准定位的树莓派机器人!
树莓派“复活”我的世界爬行者,现实版“噩梦”机器人诞生!
基于XIAO RP2040和树莓派的围棋棋盘游戏系统设计



评论