 基于STM32CUBEMX驱动TOF模块VL53l0x(2)----修改设备地址
基于STM32CUBEMX驱动TOF模块VL53l0x(2)----修改设备地址

概述
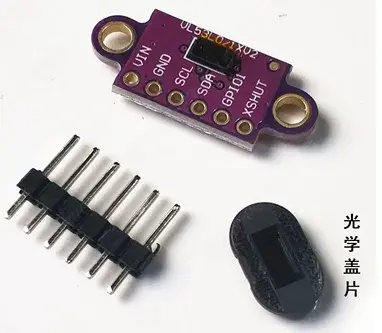
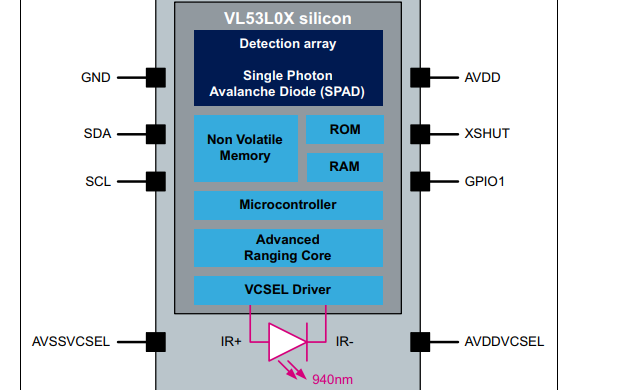
本章主要介绍如何修改VL53L0X传感器的I2C地址,并成功驱动设备以使用新的地址。VL53L0X是一种多功能、高性能的接近和环境光传感器,常用于测量物体与传感器之间的距离、检测物体的接近程度以及测量环境光强度等应用。
在某些情况下,可能需要在同一I2C总线上使用多个VL53L0X传感器,或与其他I2C设备共享总线资源。由于每个VL53L0X传感器具有默认的固定I2C地址,这可能导致地址冲突,从而阻碍多个传感器的同时使用。为了解决这个问题,可以通过修改传感器的I2C地址来避免冲突,并使其能够在同一总线上与其他设备共存。
修改VL53L0X传感器的I2C地址,通过配置传感器内部寄存器来修改I2C地址。将提供具体的寄存器配置值和步骤,确保能够成功更改传感器的地址。然后驱动新地址的VL53L0X传感器,使用新的I2C地址与VL53L0X传感器进行通信。
最近在弄ST的课程,需要样片的可以加群申请:615061293 。
视频教学
[https://www.bilibili.com/video/BV1cm4y1N7HN/]
样品申请
[https://www.wjx.top/vm/OhcKxJk.aspx
源码下载
[https://download.csdn.net/download/qq_24312945/88332774]
修改设备地址
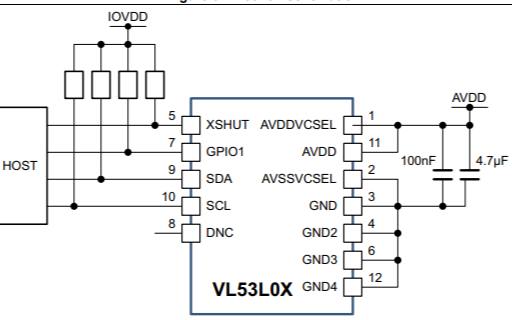
VL53L0X使用I²C总线进行通信。默认情况下,VL53L0X的7位地址为0x29。然而,为了避免地址冲突并允许多个传感器共享相同的I2C总线,用户可以通过向寄存器I2C_SLAVE_DEVICE_ADDRESS(寄存器地址为0x8A)写入自定义的7位地址来修改传感器的地址。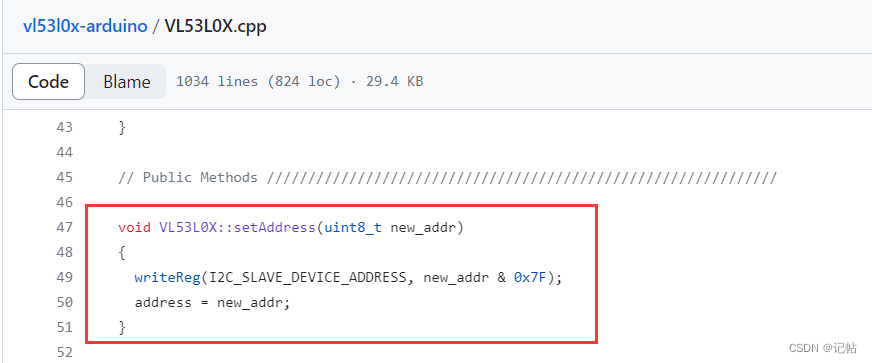
修改后如下所示。
// Public Methods //////////////////////////////////////////////////////////////
void VL53L0X_setAddress(uint8_t add,uint8_t new_addr)
{
VL53L0X_WriteByte(add,I2C_SLAVE_DEVICE_ADDRESS, new_addr & 0x7F);
}
在VL53L0X.h文件,该文件包含了VL53L0X传感器的相关定义和配置。
在VL53L0X.h文件中,可以定义2个设备的地址常量,分别表示不同的传感器。例如,可以使用以下方式定义地址常量:
#define VL53L0X_DEFAULT_I2C_ADDR1 0x29 ///< The fixed I2C addres
#define VL53L0X_DEFAULT_I2C_ADDR2 0x30 ///< The fixed I2C addres
这里的地址值是根据实际需求和硬件连接情况选择的,确保每个设备具有唯一的地址。
通过使用定义的设备地址常量,可以轻松地管理和操作多个VL53L0X传感器。
首先使用VL53L0X_Init函数初始化传感器,接下来通过调用VL53L0X_setAddress函数来修改设备地址。这个函数需要两个参数:旧的设备地址(即初始的设备地址)和新的设备地址(你希望将传感器的地址修改为的值)。
/* USER CODE BEGIN 2 */
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET);
HAL_Delay(200);
if (!VL53L0X_Init(VL53L0X_DEFAULT_I2C_ADDR1,true))
{
printf("Failed to detect and initialize sensor!");
while (1) {}
}
/************修改VL53L0X_2地址为VL53L0X_DEFAULT_I2C_ADDR2(0x30)*********************/
VL53L0X_setAddress(VL53L0X_DEFAULT_I2C_ADDR1,VL53L0X_DEFAULT_I2C_ADDR2);
/* USER CODE END 2 */
主程序
在主程序的while循环中,使用VL53L0X_readRangeSingleMillimeters函数从传感器读取距离数据。这个函数需要传入设备的新地址VL53L0X_DEFAULT_I2C_ADDR2作为参数。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
L=VL53L0X_readRangeSingleMillimeters(VL53L0X_DEFAULT_I2C_ADDR2);
printf("L=%d",L);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
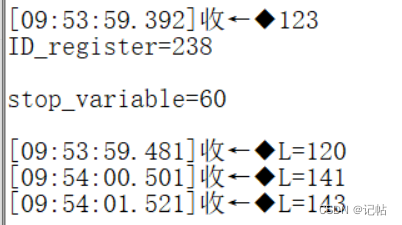
测试结果
测试距离结果如下所示。
-
模块
+关注
关注
7文章
2849浏览量
53466 -
地址
+关注
关注
1文章
32浏览量
11248 -
TOF
+关注
关注
9文章
547浏览量
38661 -
stm32cubemx
+关注
关注
5文章
290浏览量
17490 -
VL53L0X
+关注
关注
0文章
7浏览量
2981
发布评论请先 登录
基于STM32CUBEMX驱动TOF模块VL6180与VL6180X(3)----修改设备地址
基于STM32CUBEMX驱动TOF模块VL53l0x(1)----单模块距离获取的最佳实践

基于STM32CUBEMX驱动TOF模块VL53l0x(3)----驱动多个VL53L0X
CW32模块使用 VL53L0X激光测距传感器
新一代ToF 激光测距模块VL53L0X
怎么使用VL53L0X和STM32L476 Nucleo64?
VL53L0X可以永久更改I2C地址吗?
VL53L0x环境光灵敏度无法测量距离
RT-Thread VL53L0X TOF传感器驱动设计资料实现
请问VL53L0X的FOV范围是多少?
VL53L0X TOF激光测距传感器的数据手册免费下载
微雪电子测距传感器VL53L0X测距模块简介
使用STM32F103应用VL53L0X激光测距模块的测试参考程序免费下载
VL53L0X激光测距传感器的数据手册免费下载
小安派BW21-CBV-Kit入门教程之读取VL53L0X红外测距传感器数据



评论