 研究基于多功能离子纤维传感器系统的物体识别和抓取的人工触觉感知
研究基于多功能离子纤维传感器系统的物体识别和抓取的人工触觉感知

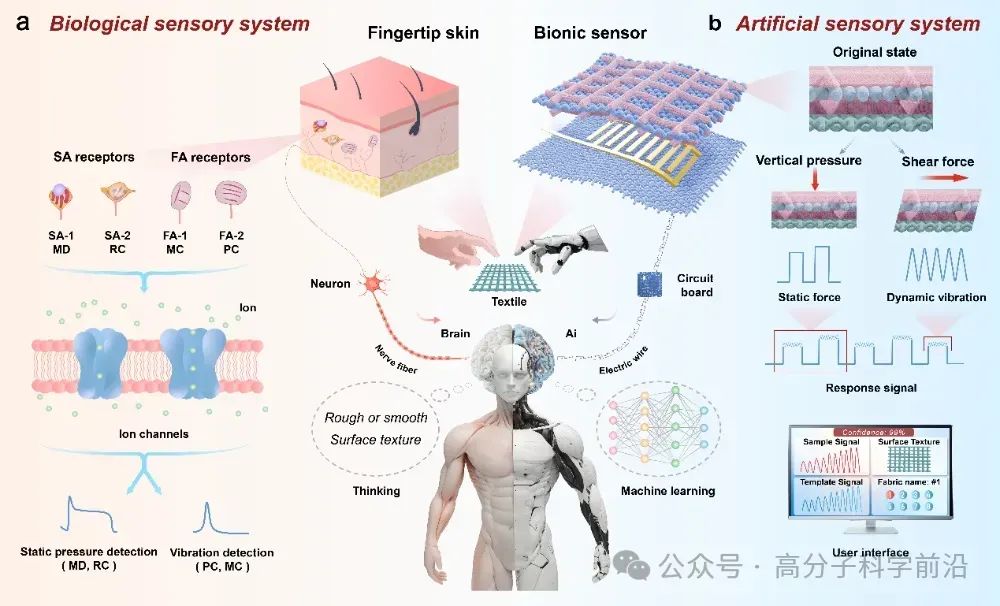
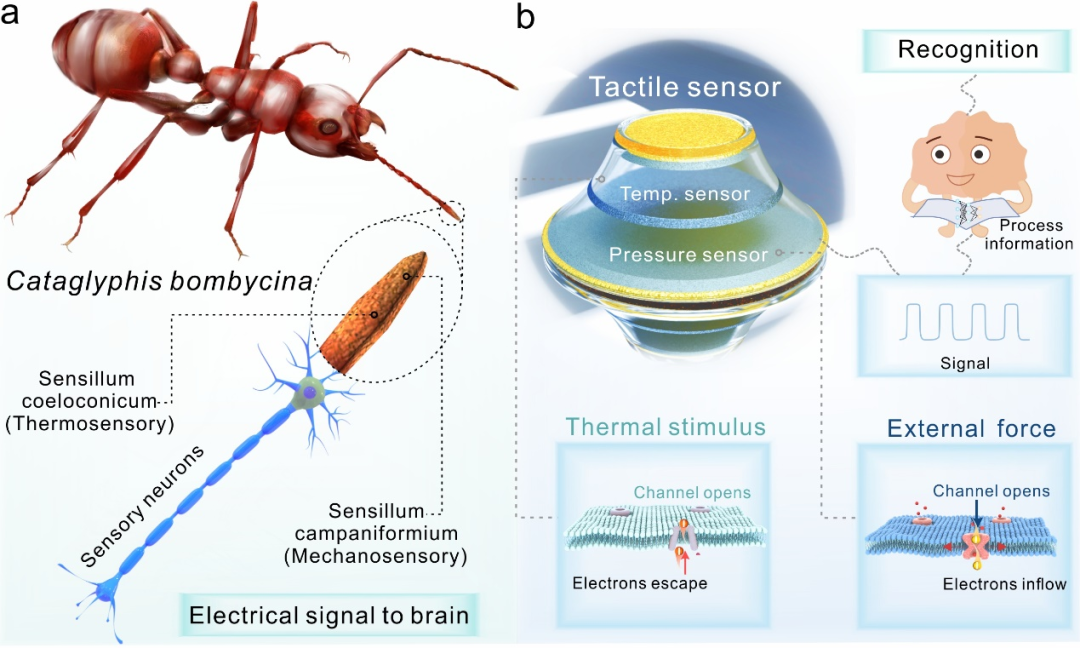
人类触觉感知是一种复杂的感觉系统,它依赖于皮肤中的感觉受体来接收外部刺激,转换信号,随后通过神经系统分析和识别这些信号。传递到大脑皮层的触觉信息在特定区域经历复杂的处理。例如,体感皮层感知身体位置和运动的变化,而顶叶皮层负责识别物体的形状和纹理。人类的触觉感知超越了单纯的生理反应;它允许个人通过触摸辨别物体的形状、纹理和表面特征,促进与环境的互动和决策过程。柔性可穿戴技术的进步促使人们试图通过压力传感器模拟人体皮肤的触感。利用压阻、压电电容、压电和其他机制的柔性压力传感器具有高灵敏度和快速响应性,已被广泛开发并有效应用于仿生机器人、远程医疗、电子皮肤等各个领域。然而,仅基于单一机制使用压力传感器实现大脑皮层材料识别的全面模拟仍然具有挑战性。基于单个压阻或压电电容的压力传感器通常只采集与压力或力学相关的单个信号,因此难以同时提供材料识别所需的多维信息。由于自然界中各种材料的表面电荷特性不同,摩擦电纳米发电机(TENG)可以通过接触具有不同电子增益或损失能力的材料来感应不同量的正负电荷,并在表面之间产生电势。基于不同的摩擦电输出信号,可以有效地识别所接触的材料类型。相比之下,虽然TENG可以实现材料的初始区分,但它们仅用于动态压力,在抓取物体时无法捕捉到有关机械刺激的准确信息。因此,需要同时集成多种传感机制的多模态触觉传感器,以多种方式实现对材料特性和机械刺激信息的捕获。李等设计并开发了一种由软硬件协同驱动的基于全皮仿生e-skin的智能材料认知系统,该系统可以通过单次接触实现不同材料及其位置的同时认知,有望为智能机器人和假肢提供新的触觉认知能力,从而促进智能化进程的发展。
提高TENG的输出性能以及摩擦电层与识别对象之间的电负性差异在研究中具有实际意义。引入微结构来增加接触表面积,从而产生总电荷是最直接的方法。通过静电纺丝制备的微纳纤维具有较大的比表面积和丰富的多孔结构,不仅易于引入微观结构,而且由于其薄而轻的质量和与皮肤的柔软贴合,具有优异的穿着舒适性。因此,它们是制备可穿戴TENG的有前景的候选者。然而,纤维结构表现出相对较低的功率输出,主要归因于其微米级的厚度。因此,除了结构调制外,摩擦电材料的表面功能化,如离子掺杂、自由基注入和等离子体处理,也会显著影响电荷的产生。目前的大多数报告主要集中在修改负摩擦电层上,这在识别高电负性材料方面的改进有限。实际上,TENG的性能也与正摩擦电层接触表面上的电荷密度成正比。通过掺杂供电子离子液体对正摩擦电层材料进行改性是一种有前景的尝试。然而,虽然离子注入可以显著提高TENG的输出,但其长期稳定性仍需考虑。
对于离子电容式压力传感器,离子液体掺杂同时赋予复合纤维薄膜优异的离子传输性能,可以通过在外部压力刺激下与电极形成阴离子和阳离子的双电层(EDL)来实现触觉传感。由于EDL界面正负电荷之间的原子尺度距离(≈1 nm),离子电子器件可以获得µF cm−2范围内的超高面积电容。这解决了传统电容式传感器灵敏度低的问题,显著提高了可穿戴触觉传感器的灵敏度。EDL电容主要受界面接触面积的影响。因此,具有多层光纤网络结构的离子触觉传感器可以在宽压力范围内实现增强的传感器灵敏度。
本文亮点
1. 本工作用1-乙基-3-甲基咪唑双氰胺([EMIM][DCA])改性的多功能离子纤维膜可以实现高性能的离子电容传感和摩擦发电。[EMIM][DCA]通过独特的氢键高度掺杂到热塑性聚氨酯中,从而制成具有超高灵敏度(184.3 kPa−1)和超低检测限(1.9 Pa)的电容式触觉传感器。
2. 双氰胺离子将供电子基团引入正摩擦电层,使摩擦电纳米发电机(TENG)的输出性能提高了2.47倍,具有超过20000次循环的优异稳定性。
3. 通过整合这些出色的触觉传感和摩擦电特性,开发了一种智能手套,可以捕捉微妙的抓握动作并识别不同的材料。扩展TENG阵列并将机器学习集成到自动分拣夹具中,可以进一步增强识别对象的多样性,并将材料识别准确率提高到99.17%。
图文解析
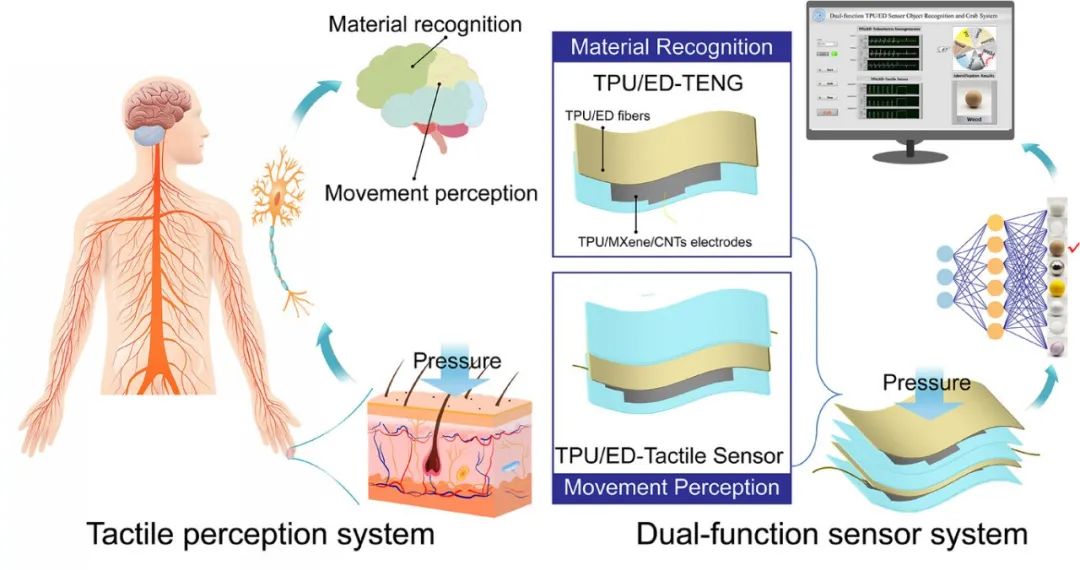
图1. 基于双功能离子纤维的传感器模拟人类触觉感知系统用于物体识别和运动捕捉的示意图。
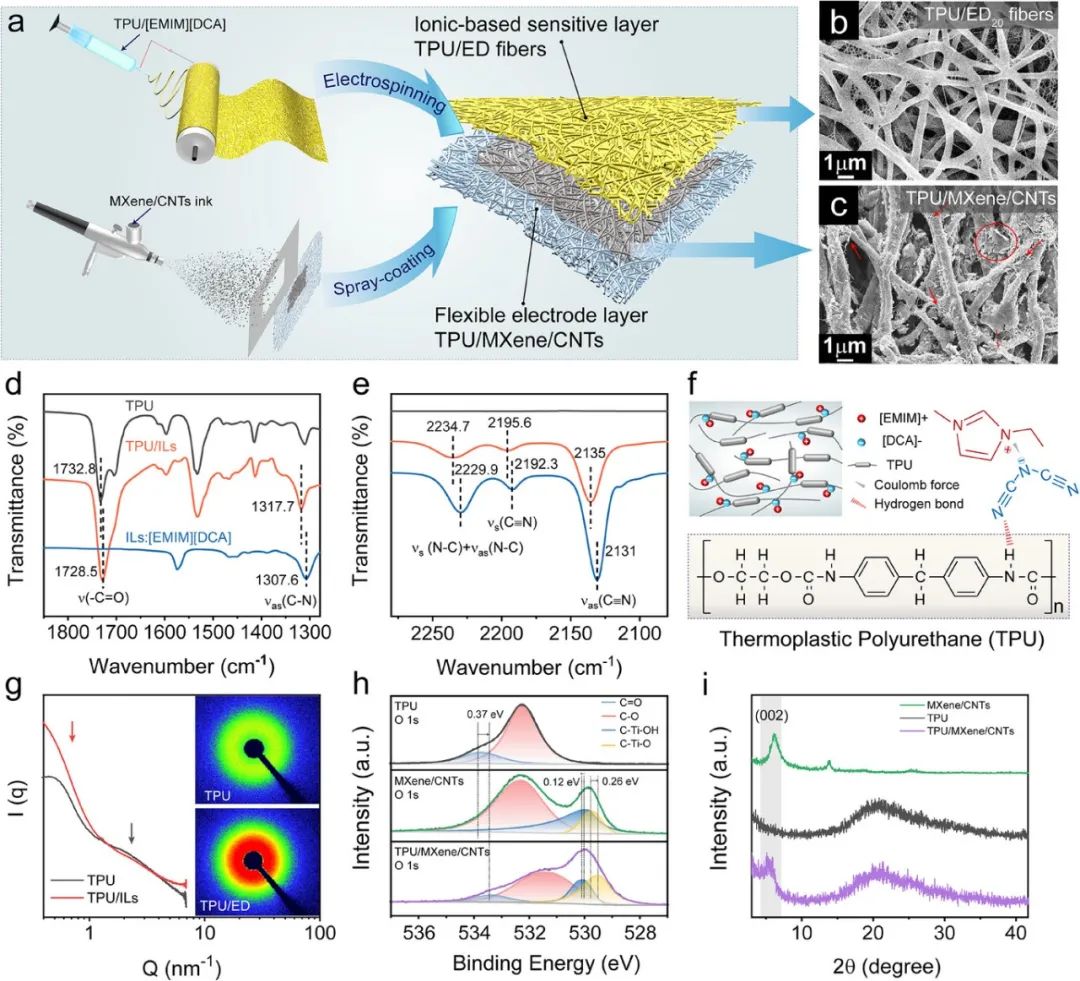
图2. 双功能传感器的合成原理图和组成表征。a) 敏感层TPU/ED纤维和柔性电极TPU/MXene/CNTs的制备示意图。b) 掺杂20 wt%[EMIM][DCA]的TPU/ED纤维的SEM图像。c) TPU/MXene/CNTs电极的SEM图像。TPU、TPU/ED和[EMIM][DCA]d)在1250–1850 cm-1和e)在2080–2280 cm-1的傅里叶变换红外光谱揭示了代表性峰ν(C)的红移═O) 以及[EMIM][DCA]。f) TPU和[EMIM][DCA]分子结构中氢键形成的示意图。g) TPU、TPU/ED纤维的SAXS图案显示,随着[EMIM][DCA]的添加,聚合物链距离增加。h) TPU、MXene/CNT和TPU/MXene/CNTs的O 1s XPS扫描光谱。i) TPU、MXene/CNT和TPU/MXene/CNTs的XRD。
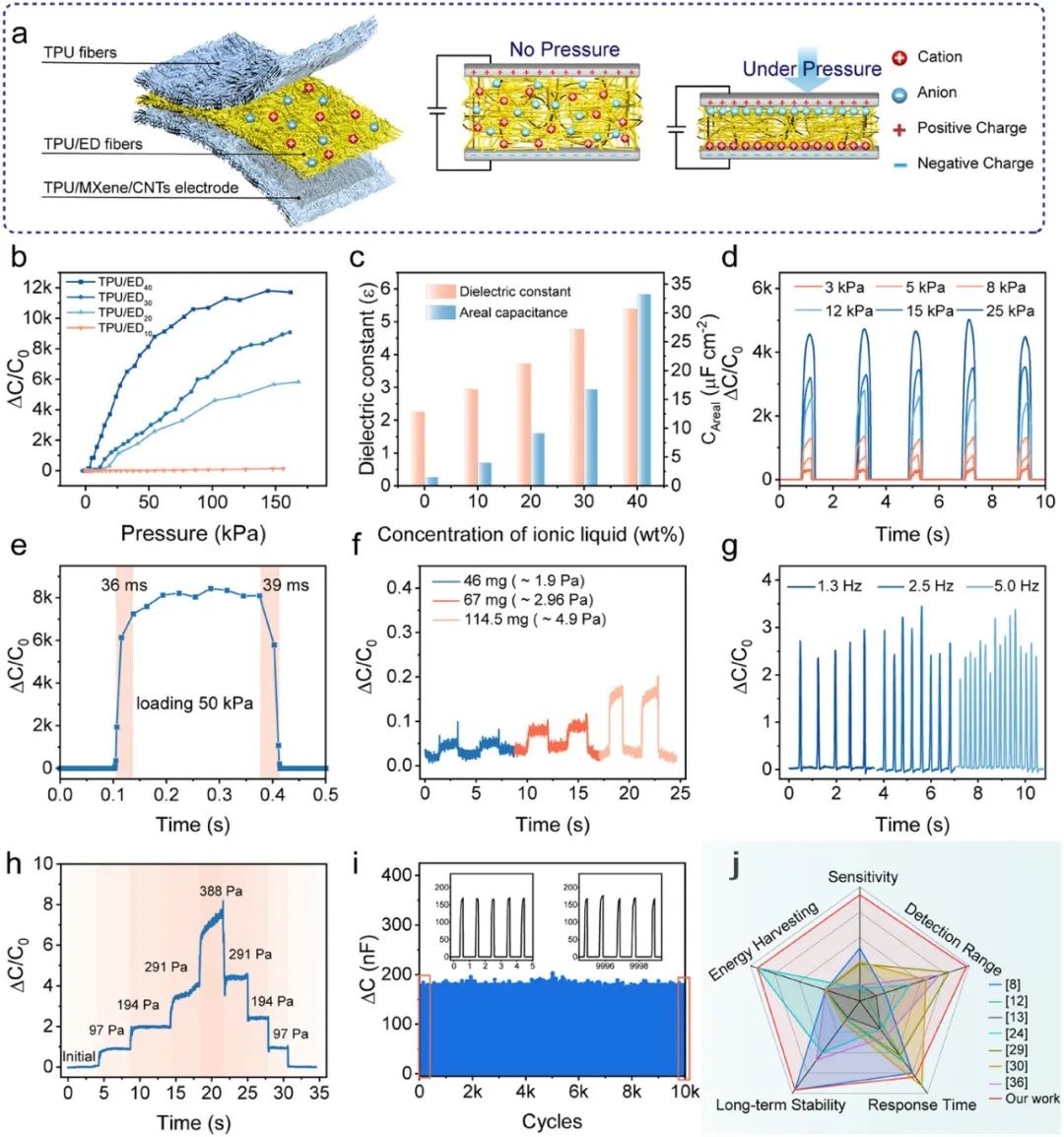
图3. 基于TPU/ED纤维的触觉传感器(TPU/ED传感器)的传感机制和传感性能。a) TPU/ED传感器结构和离子电容传感机制的示意图。b) 基于不同[EMIM][DCA]掺杂浓度的传感器的相对电容随压力曲线而变化。c) 0-40 wt.%纤维膜的相对介电常数和0-40 wt.%IL掺杂传感器的面电容。d) 掺杂40 wt%离子液体的优化TPU/ED传感器(TPU/ED40传感器)在3-25 kPa的周期性加载和卸载时的相对电容变化。e) TPU/ED40传感器在装载和卸载过程中的响应时间和恢复时间。f) 感应信号对低至1.9 Pa(≈46 mg泡沫)的微小压力做出反应。g) 传感器对以不同频率按压洗耳球产生的微弱气流的电容响应。h) 按顺序放置/取1克重物时检测微小的压力变化。(i) 在10 kPa的加载和卸载过程中的循环传感性能。在10000次循环后,没有监测到明显的性能下降。j) 基于TPU/ED的触觉传感器与其他报道的离子电容传感器在传感性能矩阵方面的雷达图比较。
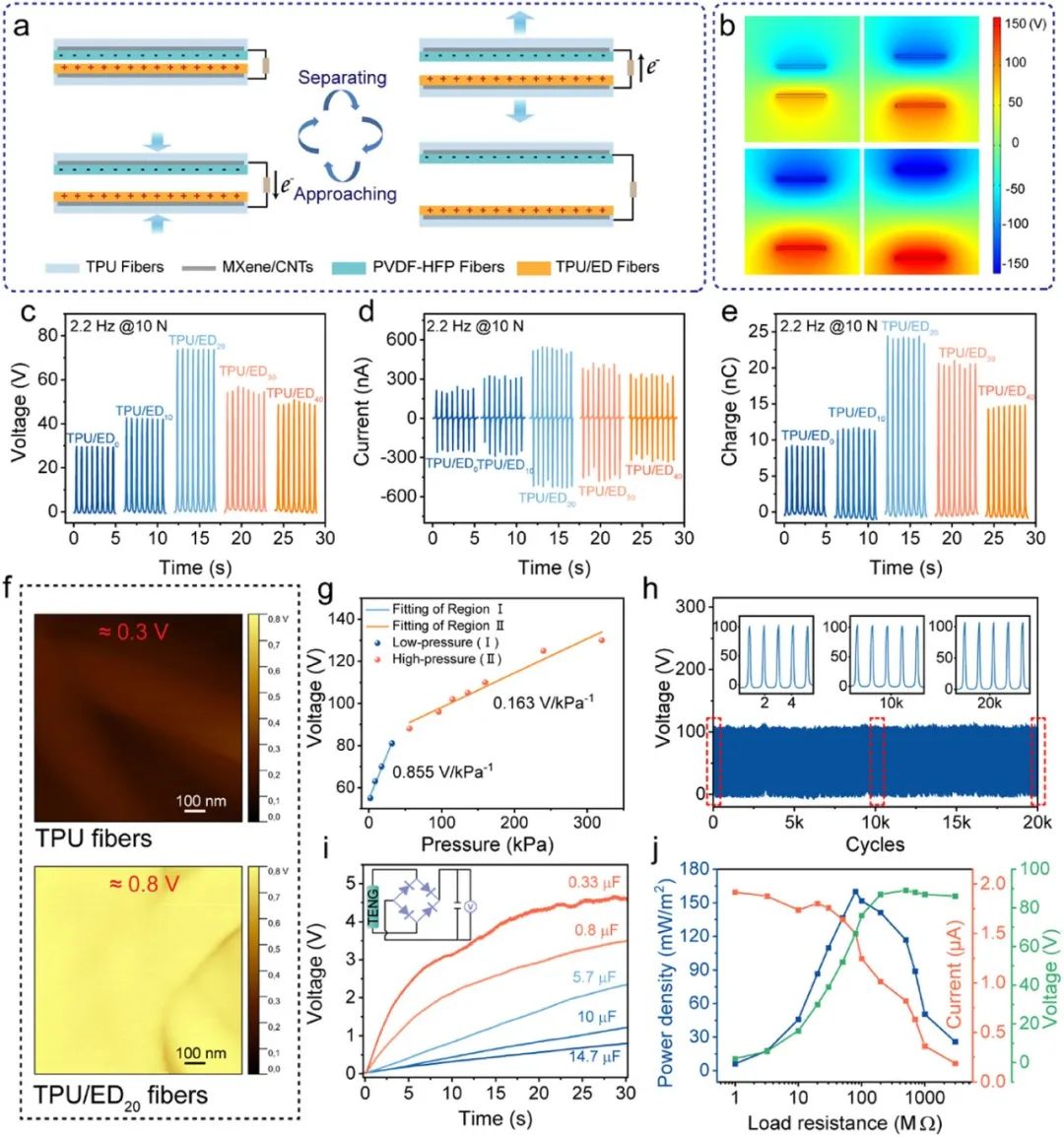
图4. 基于TPU/ED纤维(TPU/ED-TENG)的TENG的工作机理和摩擦电输出性能。a) TPU/ED-TENG工作原理示意图。b) COMSOL Multiphysics软件模拟了TPU/ED-TENG的相应电位分布。c) 开路电压,d)短路电流,e)在2.2 Hz的工作频率和10 N的机械力下,具有不同掺杂IL的TPU/ED-TENG的短路电荷转移。f) TPU纤维和TPU/ED20纤维的平均表面电位的KPFM结果。g) TPU/ED20-TENG在低压和高压范围内的开路电压随压力的变化和灵敏度分别为0.855和0.163 V kPa−1。h) TPU/ED20-TENG的输出电压在20000次接触-分离循环后没有退化,表现出优异的长期稳定性。i) TPU/ED20-TENG通过桥式电路对0.33至14.7 µF不同容量电容器的充电曲线。j) 电流、电压和峰值功率密度与1 MΩ至3 GΩ外部电阻的函数关系图。外部电阻为80 MΩ时,可实现最大峰值功率密度。
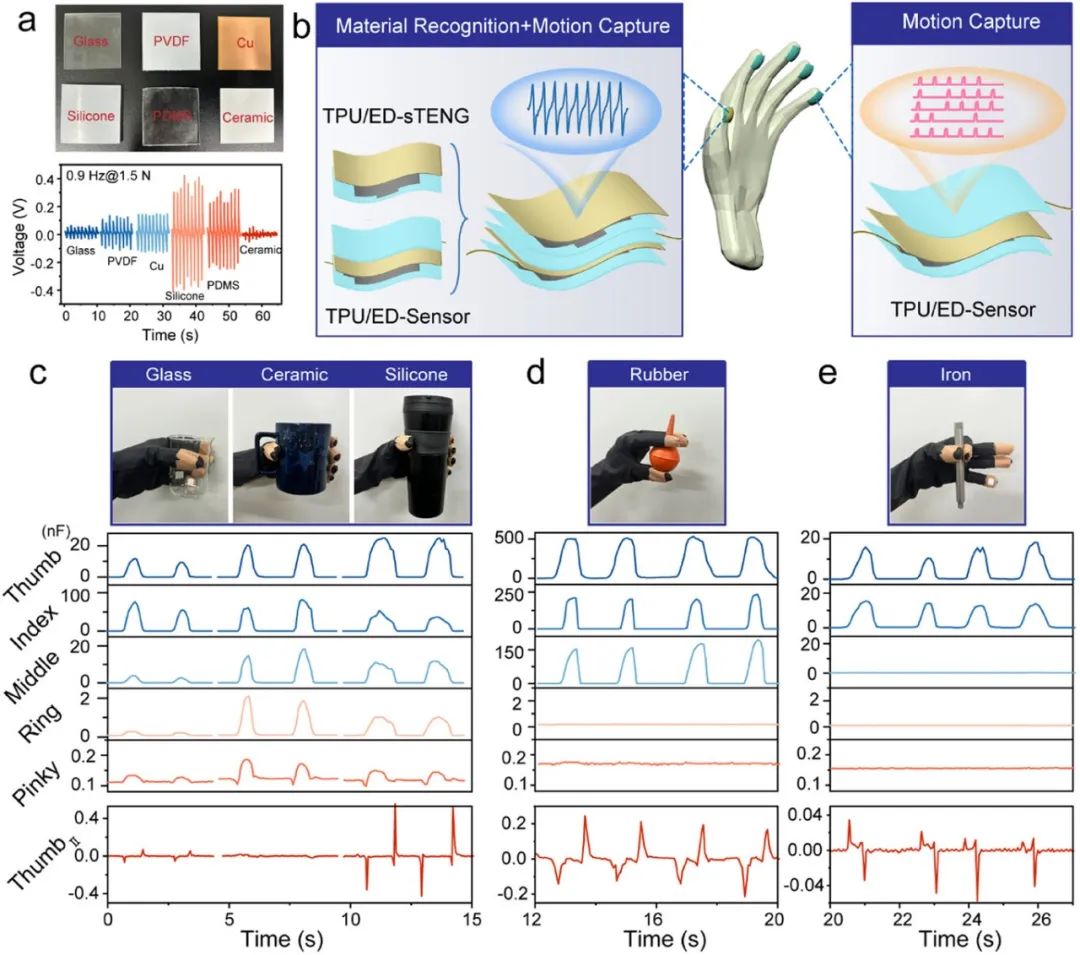
图5. a) TPU/ED sTENG对不同材质物体的信号输出。b) 拇指集成的TPU/ED sTENG和TPU/ED传感器以及其他手指集成的TPO/ED传感器的示意图。当c)握住由玻璃、陶瓷和硅胶制成的杯子d)按下洗耳球e)握住铁棒时,手套上的六个传感器的输出信号变化曲线。
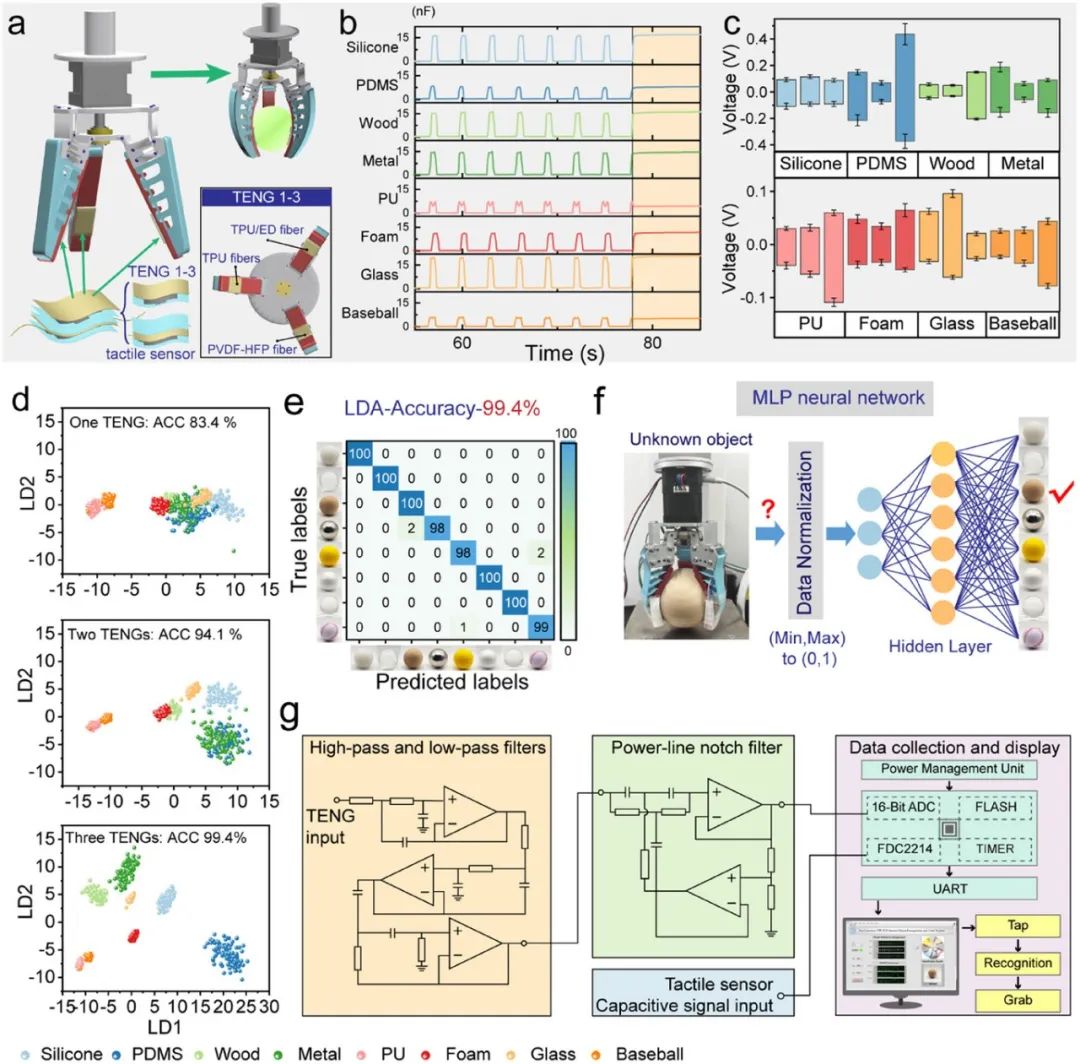
图6. 机械夹具系统的机器学习辅助对象识别分类a)安装有三组单电极TENG和触觉传感器的机械夹具示意图。b) 传感器3抓取八个物体并拾取它们的电容变化曲线。c) 三个TENG抓取八个物体100次产生的摩擦电压的峰值分布。d) LDA绘制了不同数量的TENG夹持八种材料的数据可视化图。e) TENG 1-3对8个物体的识别准确率为99.4%的混淆矩阵。f) 一种用于识别未知对象的MLP神经网络模型。g) 基于TPU/ED光纤的传感器物体识别与抓取系统的电路原理图。
审核编辑 黄宇
-
传感器
+关注
关注
2573文章
54372浏览量
786087
发布评论请先 登录
中国科学院金属研究所:柔性单通道多功能热电半导体传感器件研究取得重要新进展

力传感器在工业自动化机器人中的应用:精确抓取/装配作业/搬运作业/柔顺控制

【「AI芯片:科技探索与AGI愿景」阅读体验】+具身智能芯片
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
韩国蔚山科学技术院:多层离子电子传感器,具有受控的电荷梯度,可实现高性能、自供电的触觉传感
南京工业大学:仿生触觉传感系统让机器人拥有“人类指尖”般的细腻感知
超声波多功能气象传感器:精准感知,气象监测新利器
中国科学院:电鳗启发离子电子人造皮肤,具有多模态感知和传感器内储层计算功能
昆虫触角启发研发双模触觉传感器
仿生触觉传感器:触碰未来的科技奇迹
广西大学:用于高温应用中的压力和温度传感的摩擦电触觉传感器
半导体光纤多功能传感器模拟人类感官
提出纸做的触觉传感器
研究一种基于纳米纤维屈曲的微型弯曲敏感纤维





 工商网监
工商网监
评论