 “机器人+”电梯应用突破空间限制 尽享“一键直达”
“机器人+”电梯应用突破空间限制 尽享“一键直达”

近日,【“机器人+”应用】标准《移动机器人电梯适用性要求及测试方法》第二次专家组研讨会顺利召开,思岚科技作为智能机器人行业领军企业,用领先的技术和成熟的落地方案在此次专家研讨会中建言献策,助力机器人乘梯安全、机器人-电梯接口与交互、机器人电梯适用性分级等标准的建设。
机器人乘梯跨楼层作业能力能够增强机器人应用灵活性,有效提升任务效率,因此智能机器人是否可以灵活乘挤电梯的问题也被广泛关注。
在此次研讨会上,思岚科技机器人测试安装部总监张丽萍向大家分享了思岚在智能机器人在梯控解决方案中的宝贵经验,并提出了三大方向:
01
乘梯任务循环测试的测试方法和要求
02
机器人跨越电梯缝隙的要求和测试方法
03
电池安全性及后续各电池类型的应用安全标准
针对机器人乘梯任务循环(包含导航避障,自主乘/“挤”梯,机器人-电梯接口与交互等,异常处理等),机器人如何跨越电梯缝隙,电池的安全性问题等这些难题,其实早在几年前,思岚就已经对智能机器人乘梯挤梯的技术进行了研究并且成功突破了技术难关。
2021年,思岚就发布了业内首个集成梯控的机器人底盘Hermes,成为了多楼层智能服务机器人开发的最佳“切入口”。2022年,思岚推出了同样搭载智能梯控方案的机器人移动底盘Athena2.0。并在今年9月份实现了全新升级,拥有Pro和Pro Max两大版本,助力机器人多楼层运动。
自主导航避障、乘挤梯让机器人任务更顺
自主导航避障
01
思岚的机器人移动底盘融合了激光+视觉等多重SLAM技术,采用双摄深度摄像头,能够灵活识别环境中的黑白物体、细小物体、高处物体等障碍物,对导航行为进行预判,即使在高峰时期也不会撞到人。
自主乘/挤电梯
02
Hermes/Athena2.0 独创性集成了智能电梯控制方案,可以实现自主呼叫电梯,自主搭乘/挤电梯,实现多楼层无障碍行动。同时,思岚提供全套的电梯加装和调试服务,安装简单快捷,助力开发者快速验证,实现机器人快速应用落地。
无需改装,适配90%以上电梯品牌
03
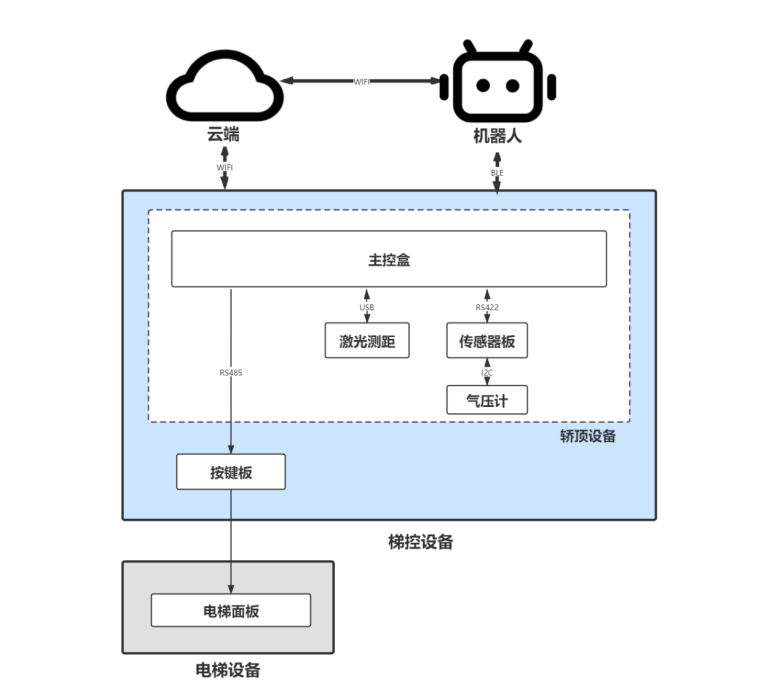
思岚的3.0梯控方案优化了滤波算法,可以支持市面上90%以上的电梯品牌,不需要改装电梯即可进行实时监控,通过内置的传感器以及自适应算法,就可以准确检测出电梯轿厢当前所在的楼层、上下行状态,实时性到了毫秒级,精确度达到96%以上,实现机器人智能呼唤,自主切换楼层地图,自主搭乘并上下电梯等功能,让机器人乘/挤电梯更加智能。
快速处理突发异常
04
为了解决梯控系统的快速应用,思岚将“轻部署,高可靠”做到极致。在使用思岚机器人底盘的同时,即可享受机器人平台服务,包括云后台服务、智能梯控硬件设备加装、调试服务。在智能机器人出现故障或异常时可以通过云端快速调整。
超强爬坡越障能力“通关”电梯缝隙
思岚在为客户部署智能机器人时,也遇到过很多问题,比如面对铺设厚地毯的电梯,以及电梯与地面存在一定高度的坡度或缝隙时,机器人需要有足够的爬坡越障能力才能顺利通行。
思岚显然注意到了这一点,Hermes和Athena2.0系列均拥有卓越的越障能力,通过这些“关卡”可谓如履平地。
全力做好电池的安全性保障
生命重于泰山,安全生产是民生大事。思岚的机器人底盘以及充电桩采用的都是阻燃材料,能够保护电池和机器人使用安全。
值得一提的是,10月,由思岚参与起草的《企业研发机构管理基本要求》团体标准审定会也召开完毕。该标准的评定将进一步促进企业创新,提高技术水平和市场竞争力,创造更多的商业价值和社会价值。
在标准制定的道路上,思岚一直在砥砺前行,用自己十年的技术迭代和场景积累,持续助力智能机器人产业的健康发展。
审核编辑:刘清
-
机器人
+关注
关注
213文章
30627浏览量
219715 -
智能机器人
+关注
关注
17文章
914浏览量
85413 -
SLAM
+关注
关注
24文章
456浏览量
33191
发布评论请先 登录
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
最新发布!泰科机器人发布首款自研双足人形机器人

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
盘点#机器人开发平台
联想集团聘请首位硅基员工 “联想乐享壹号”机器人上岗
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
开关柜一键顺控在一键停电、一键送电中的作用
短讯:全球首个!人形机器人技术新突破
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
移动机器人的技术突破和未来展望






 工商网监
工商网监
评论