 毫米波雷达的基础知识
毫米波雷达的基础知识

001毫米波雷达基础知识
毫米波雷达(mmWave Rader)采用毫米波作为电磁波发送信号,捕捉并处理电磁波经过路径障碍物的反射信号后可获取目标物体的速度、距离、方位角和高度等信息。
毫米波的波长范围为0-10mm,在电磁频谱中这种波长被视为短波长。采用毫米波作为电磁波信号能够获取高精度的测距信息,同时天线也可以做得更小和紧凑减小设备体积。工作频率为76–81GHz(对应波长约为4mm)的毫米波系统将能够检测小至零点几毫米的移动。
距离测量
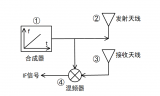
毫米波雷达距离测量的基本原理是,计算发射电磁波与接收反射电磁波之间的时间差,并通过电磁波传播速度估算目标物体距离,公式为 。如下图1所示为FMCW (Frequency Modulated Continuous Wave)雷达主射频组件的简化框图。
主要工作流程为:
①通过合成器生成线性调频脉冲;
②将线性调频脉冲通过发射天线发射出去;
③通过接收天线接收反射的电磁波;
④通过混频器将发射信号和接收信号合并到一起,生成中频(IF)信号,并通过IF信号计算时间差。
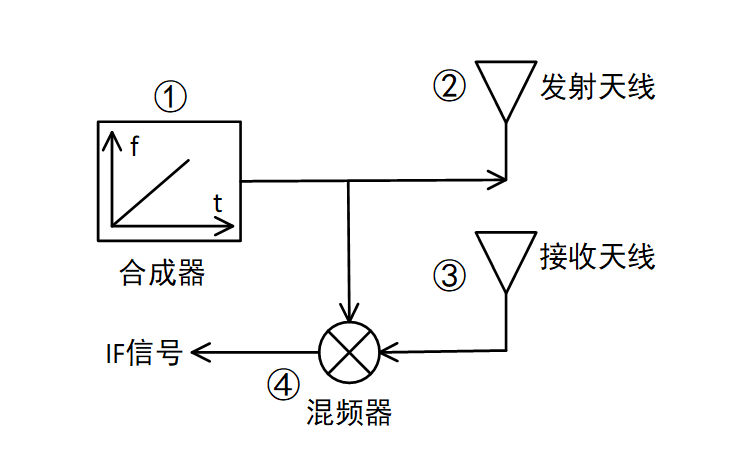
图1 FMCW雷达框图
混频器是一个电子组件能够将两个信号合并在一起并生成新的频率的信号,生成的新频率等于两个输入正弦信号频率差,相位差等于两个输入信号的相位差。图2所示为毫米波雷达经过以上流程后检测单个物体获取的IF信号。当电磁波经过路径有多个障碍物时,接收天线会接收到多个反射信号,生成多个信号频率固定的IF单音信号,通过傅里叶变换即可分离IF信号中不同单音,因此毫米波雷达能够同时检测多个目标物体的距离。
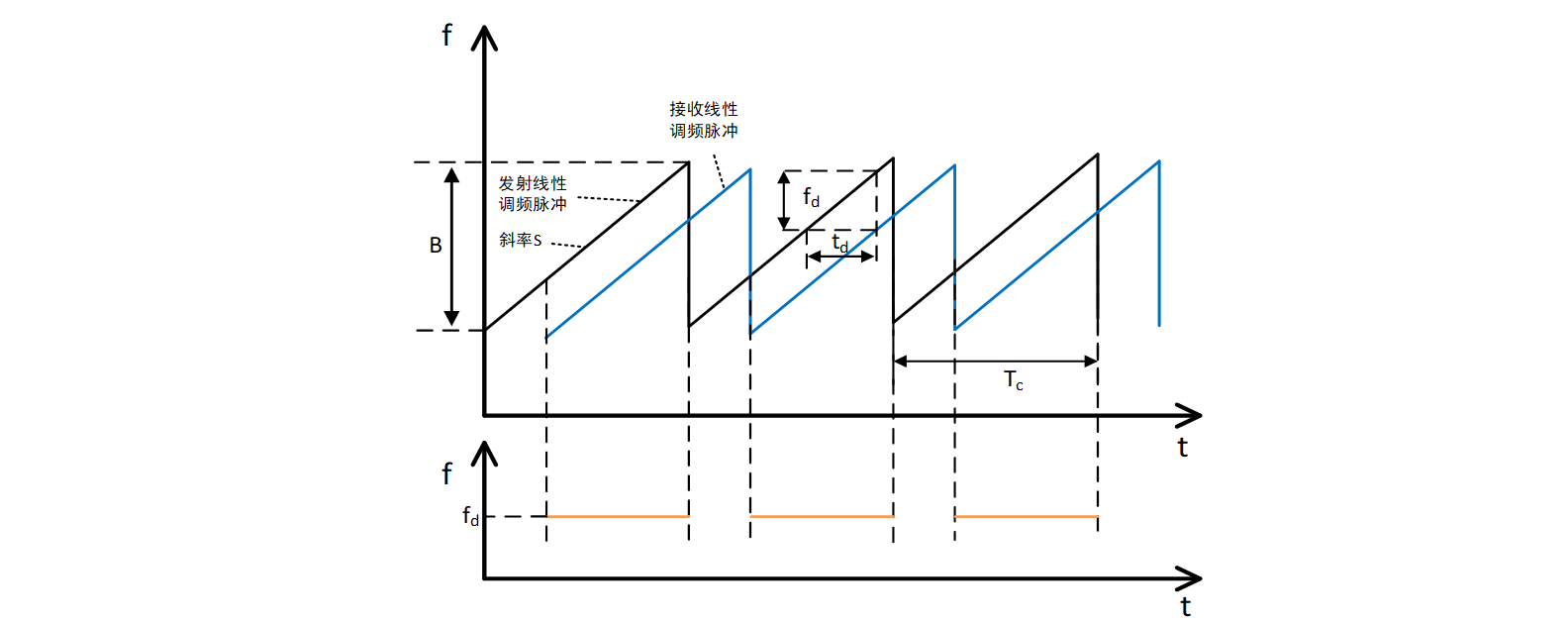
图2 毫米波雷达检测单个物体
速度测量
FMCW毫米波雷达会发射两个间隔为的线性调频脉冲用于测速,如下图6所示。每个反射的线性调频脉冲通过FFT处理后,可获取到物体的距离信息(距离FFT)。每个线性调频脉冲的距离FFT会在同一位置出现峰值相同,相位不同。测得相位差对应于速度为物体的移动。当有多个具有不同速度的物体在同一距离时,双线性调频脉冲速度测量方法将不起作用,需要发送N个线性调频脉冲并通过多普勒FFT可以计算出相同距离多个物体的速度。
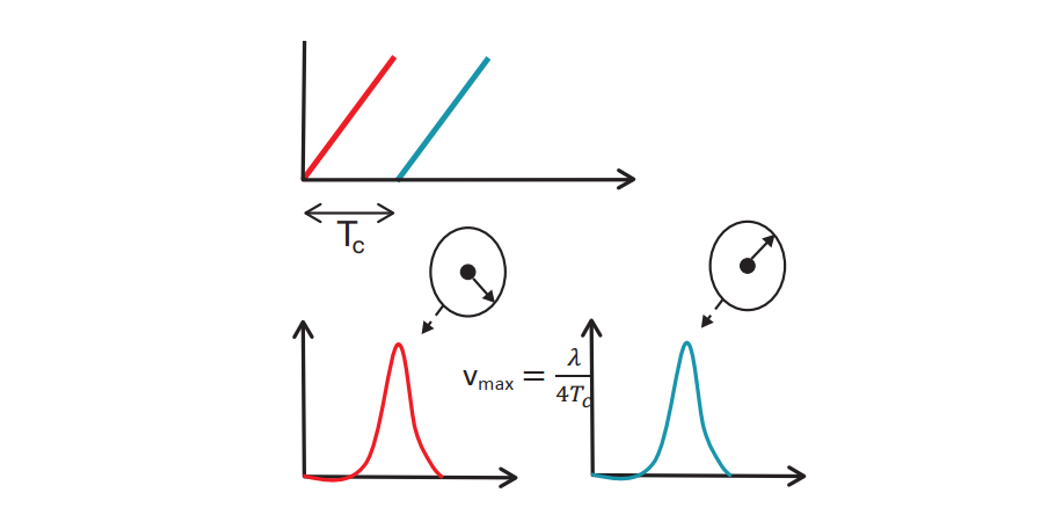
图3 双线性调频脉冲速度测量
角度检测
FMCW毫米波雷达至少需要两个接收天线才能测出目标物体角度信息。图4为毫米雷达角度检测原理,目标到天线的差分距离很小的变化就会导致距离FFT或多普勒FFT峰值相位的变化,该结果可被用于执行角度估算,进行角度估算至少需要两个天线。
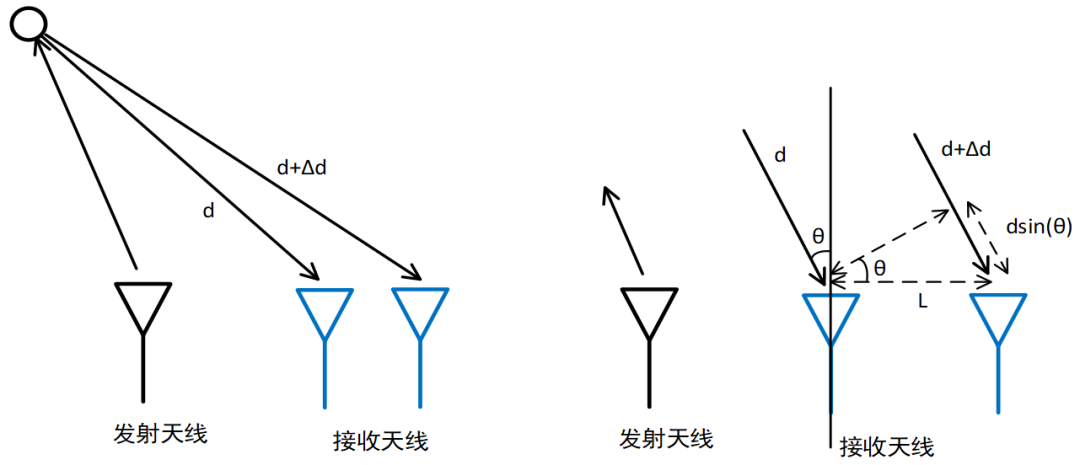
图4 FMCW毫米波雷达角度估算
相位变化与距离间的数据推导公式为:,假设接收天线接收的波形为平面波,接收天线之间的距离为,则。因此到达角可以根据公式计算出来。如下图5所示,取决于,是一种非线性依赖的关系,仅在的值很小时,才是线性近似。因此当接近0°时角度估算准确度最高,接近90°时角度估算准确度降低。
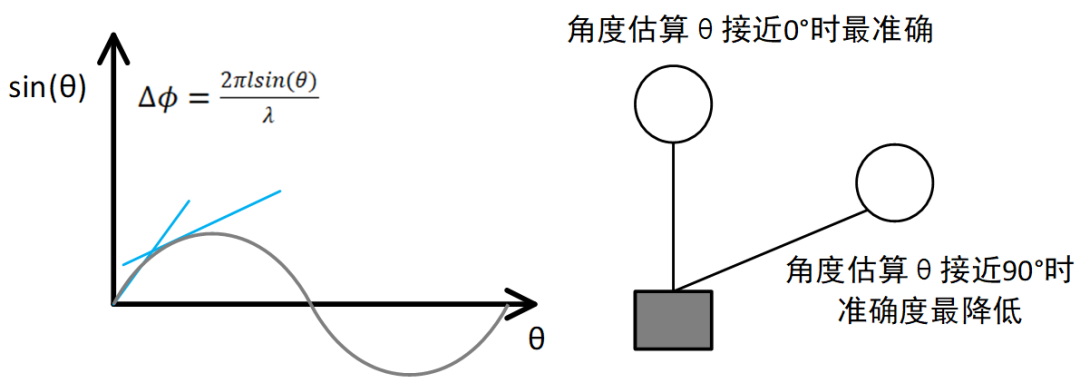
图5 角度准确度估计
002毫米波雷达机器人领域应用场景
毫米波雷达目前常应用于汽车、消费、工业以及医疗等领域。汽车是其最早的商用场景,同时也是其目前最大的应用市场。随着近些年人工智能与机器人技术的发展,毫米波雷达应用于机器人场景的也越来越多,本文主要介绍毫米波雷达在机器人领域的应用场景。
导航与障碍物规避
采用毫米波雷达作为机器人感知传感器,可实现机器人的导航与障碍物规避,与IMU、里程计、摄像头等传感器融合后可以实现对环境的建图等功能。如下视频1为TI公司工程师在ROS中使用毫米波雷达实现机器人的障碍物避障与导航效果,视频中机器人能够快速地避开障碍物并能够检测到路径中的玻璃挡板。毫米波雷达作为感知模块相较于摄像头和激光雷达等传感器,能够识别玻璃并能穿透浓雾,因此在机器人导航与避障时增加毫米波雷达能够增加整个系统的鲁棒性。
 与导航效果
与导航效果
移动平台下的多目标跟踪
多目标跟踪算法能够根据传感器的数据对多个目标进行跟踪和识别,这类传感器可以是摄像头、激光雷达和毫米波雷达等,也可以是几种传感器的组合。毫米波雷达在多目标跟踪算法中可以通过计算到目标的速度、方向和距离等参数,对目标进行分组和检测,并跟踪目标物体的运动。
所展示的为TI实验室采用毫米波雷达在移动机器人上进行障碍物跟踪与识别的效果,算法将毫米波雷达获取到的数据处理后输出点云信息和障碍物的位置信息,视频中可以看到毫米波雷达可以很轻松地在静止或移动的情况下识别并跟踪目标障碍物。
与识别的效果
在多目标跟踪算法中毫米波雷达相比摄像头优势在于能够直接获取到检测目标的速度,并能在黑夜和大雾环境下实现检测目标物体的检测与跟踪。下图6所示为毫米波雷达在黑夜环境下对微小无人机的识别效果,红框中的为摄像头检测到的无人机,黄框中为毫米波雷达检测到的无人机点云数据。
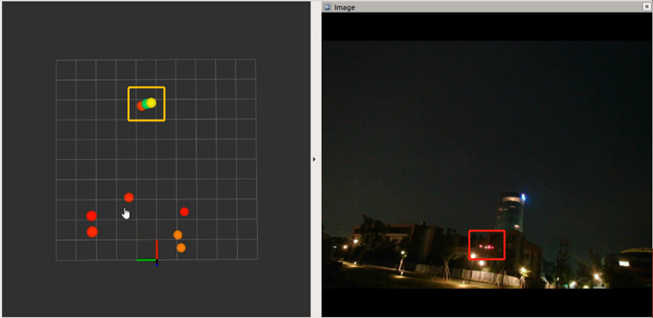
图6 毫米波雷达黑夜环境下的无人机检测
3D感知与建图
毫米波雷达可以发射毫米波信号,并通过测量信号的反射时间和强度来获取目标物体的位置、速度和角度等信息。这使得毫米波雷达能够实现对周围环境的精确三维感知。通过对多个角度和方向的扫描,毫米波雷达可以生成一个准确的三维点云,其中包含了物体的位置、形状以及相对速度等信息。利用毫米波雷达的感知数据,可以创建环境地图,这些地图通常被称为环境建图或感知地图。这些地图可以显示道路、建筑物、障碍物等环境特征,有助于自动驾驶系统做出决策和规划路径。毫米波雷达的高分辨率使其能够检测到较小的物体,如行人和自行车,从而提供更详细和准确的地图数据。
下图7为四个毫米波雷达分别朝四个方向安装在TurtleBot上,实现机器人3D感知与建图的效果图,3D建图能够提供小于1°的角度分辨率,在建图的同时能够获取到机器人室内实时的定位数据。
003毫米波雷达未来发展
毫米波雷达具备在机器人、自动驾驶等技术领域引发重大变革的潜力,然而尚未达到成熟阶段。毫米波雷达的未来发展趋势可能主要受以下几个因素影响:
1)点云质量的提升:毫米波雷达点云在数据格式中最为常见,但其质量相较于其他传感器较低,下图8展示了毫米波雷达与当前常用感知传感器性能的对比。雷达的多径效应等特性严重影响点云数据质量。急需改善信号处理流程中的信息损失,特别是通过采用精心设计的基于学习的方法替代恒虚警率自适应检测(CFAR)。基于学习的方向估计(DOA)方法,而非波束赋形(DBF)方法,也可用于超分辨率角度估计。
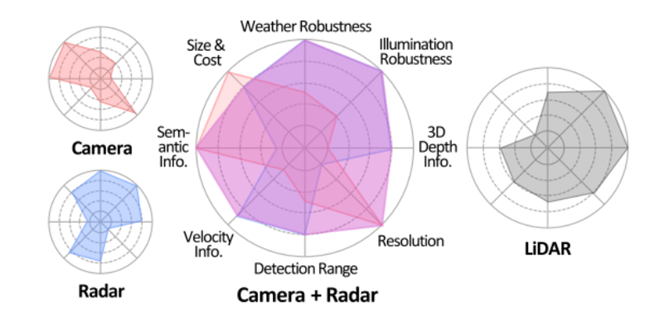
图8 常用感知传感器性能对比
2)应用算法重新设计:除了改进毫米波雷达点云,信号处理后的应用算法也至关重要。目前,许多毫米波雷达的应用算法是在相应激光雷达算法的基础上修改而来。毫米波雷达的特殊性,如速度测量能力和在极端环境下的自适应能力,需要未来进一步研究。在感知任务方面,多模态融合无疑是未来的发展方向。然而,在极端天气条件下,雷达与其他传感器的集成是否会降低其稳健性,仍需深入探讨。对于毫米波雷达的定位和地图绘制,与激光雷达和相机的融合仍有巨大的创新空间。
3)充分利用前端数据:针对毫米波雷达信号处理中的独特数据格式,如原始ADC数据、RD图和4D张量,利用这些数据进行感知、定位和映射是一个有趣且尚未被充分探索的领域。基于学习的模型有望从这些数据中获取丰富信息,同时保持良好的实时性能,这可能会成为未来研究的一个重要方向。
4)扩充数据集:与其他基于数据驱动的研究领域一样,数据集在毫米波雷达的相关研究中扮演着关键角色。然而,目前可用的毫米波雷达数据集还相对有限,数据格式和场景丰富性有待进一步扩展。为此,我们需要在数据集方面投入更多的努力,以支持毫米波雷达研究的深入发展。
审核编辑:汤梓红
-
混频器
+关注
关注
11文章
903浏览量
50189 -
雷达
+关注
关注
52文章
3450浏览量
124811 -
电磁波
+关注
关注
21文章
1507浏览量
56003 -
毫米波
+关注
关注
21文章
2067浏览量
68111 -
毫米波雷达
+关注
关注
110文章
1188浏览量
66482
原文标题:从原理到应用,教你了解毫米波雷达
文章出处:【微信号:雨飞工作室,微信公众号:雨飞工作室】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
毫米波雷达方案对比
车载毫米波雷达的技术原理与发展
车载毫米波雷达的原理是什么?
ADAS系统无人驾驶的眼睛毫米波雷达
毫米波雷达基础知识

毫米波雷达基础知识详解,毫米波雷达机器人领域应用场景



评论