 KUKA-C2机器人-校零
KUKA-C2机器人-校零

最近在校正C2机器人时遇到了一个小事故,机器人的EMT坏了,反复校正零点报校正超时.
今天我们就聊聊C2机器人的校零.
为什么要校零?

1.当机器人校正的时候,各个轴就可以运动到一个特定的机械位置,也就时所谓的机械零点。
2.一旦机器人运动到机械零点,各个轴上的绝对编码盘的值就被保存下来了。
机器人零位校正后,可以用直角坐标系移动机器人或运行程序;同时机器人也知道软限位的位置.
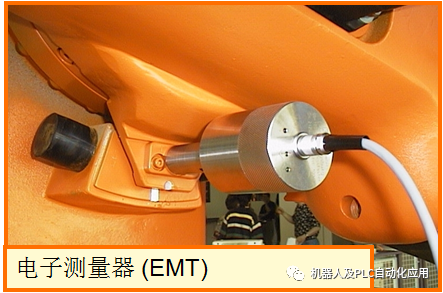
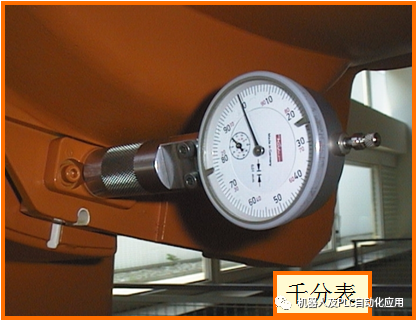
校零装置:
1.EMT

2.千分表
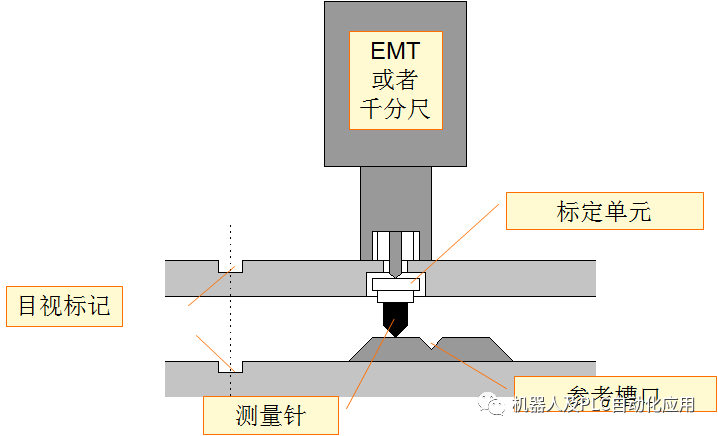
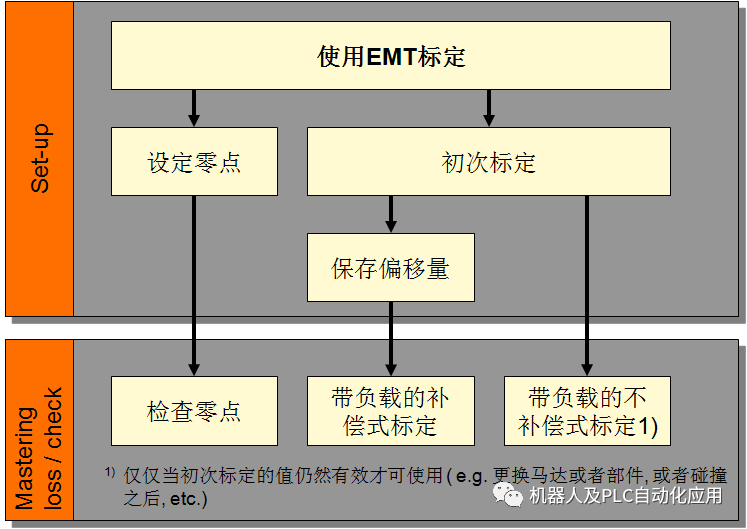
控制运行过程示意:
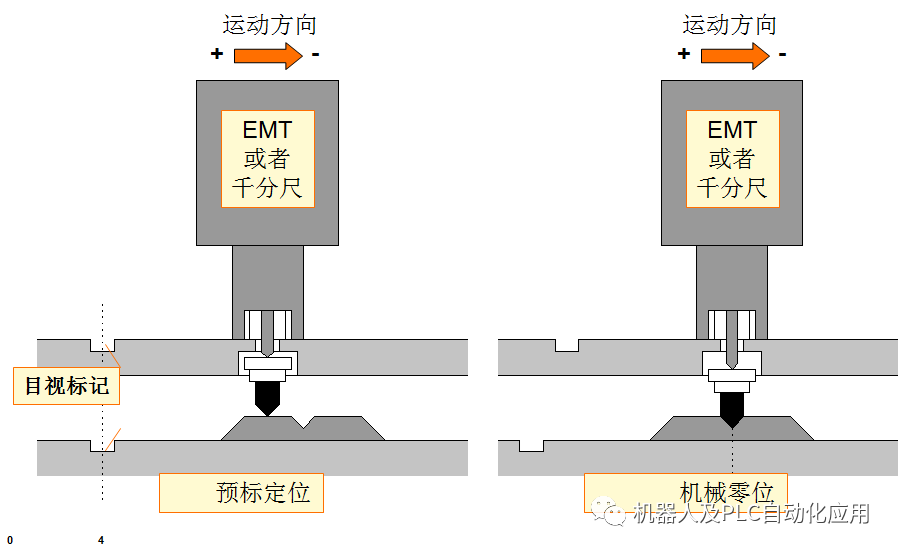
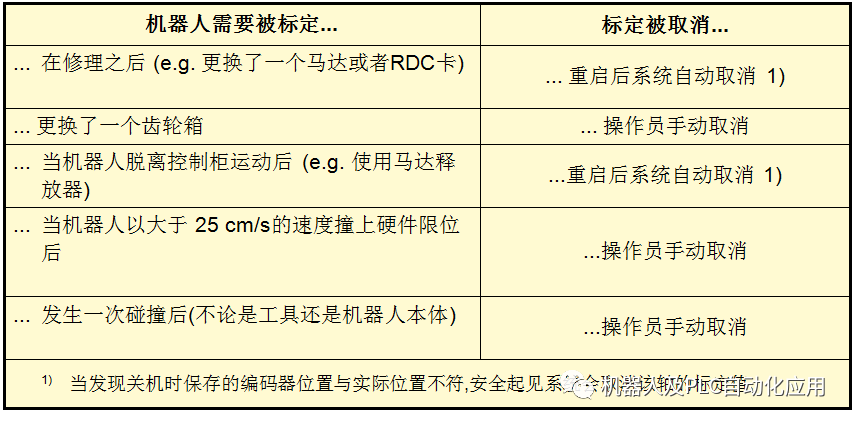
重新标定的情况:

使用EMT标定:
•把需要标定的轴移动到预标定位 (如图所示白线位置)
•使用轴坐标系移动机器人各轴
•每个轴的标定是独立的

•从1轴开始往上标定
•每个轴总是从正向往负向运动
•仅仅在T1模式下!

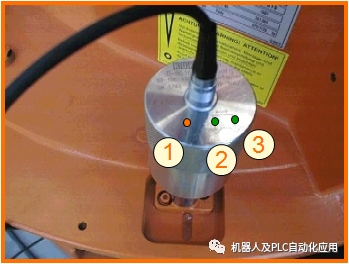
•摘掉标定单元的保护盖
•接上EMT 并连上信号线(另一端连接到机器人底座上的连接盒接口 X32上)

•EMT上有三个指示灯:
1. 红色 - 错误
2.绿色 - 下降沿
3. 绿色 - 上升沿
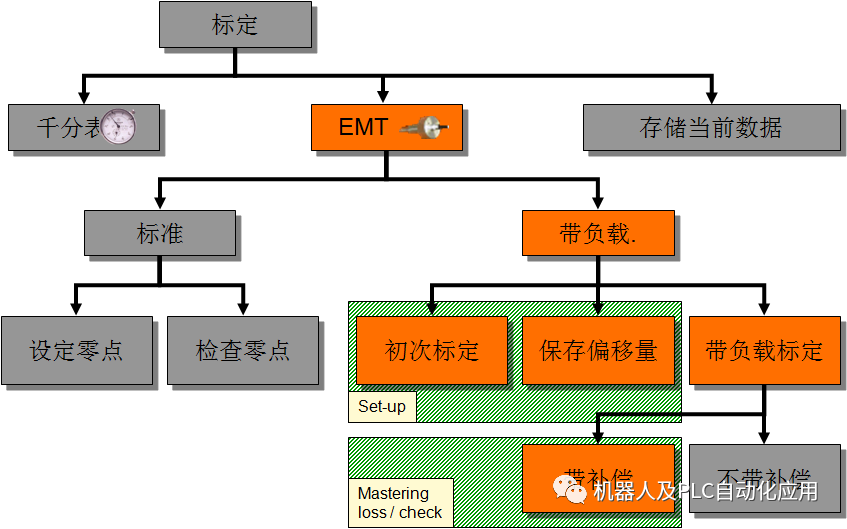
标定菜单:
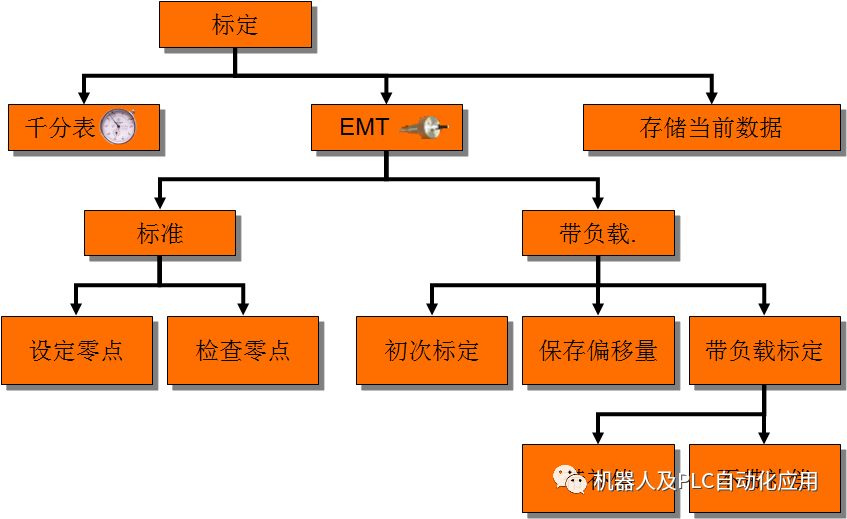
对于精确定位机器人的标定:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31444浏览量
223667 -
编码盘
+关注
关注
0文章
8浏览量
7443 -
KUKA
+关注
关注
3文章
218浏览量
17512
原文标题:KUKA-C2机器人-校零
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
零基础玩转工业机器人
,使读者快速掌握DELTA并联机器人的系统设计方法和编程应用,实现理论和实践的有机结合。2、工业机器人技术基础及应用本书以国际工业机器人四大家族ABB、
发表于 10-29 17:03
工业机器人的末端关节旋转该精确控制?
机器人的传动和布局设计从理论上讲应该是比较成熟的领域,如果有样机,拆开一看就可以知道大部分的结构。但是在结构优化设计经验、装配规范的标准化、零配件的按需定制以及供应链优化等方面国内厂商还需要很长
发表于 11-01 11:08
KUKA机器人问题解答
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
发表于 07-15 07:48
库卡KUKA机器人四种启动方式介绍
机器人先到达BCO安全参考的,然后在按下启动按钮,机器人就可以正常运行程序。 (2)操作步骤 A:编写程序并且调试程序等; B:手动状态选择需要运行的程序; C:手动状态时候上电运行程
发表于 09-04 15:45
KUKA库卡机器人伺服驱动器相关型号举例
KUKA库卡机器人伺服驱动器(Servo Drive)是KUKA运动控制的重要组成部分,被普遍应用于工业机器人及数控加工中心等自动化设备中。是用来控制伺服电机的一种控制器,其作用类似于
发表于 09-08 16:30
KUKA焊接机器人伺服电机常见故障及维修处理
KUKA焊接机器人伺服电机常见故障及维修处理1、库卡机器人伺服电机的基本检查由于库卡机器人伺服电机内含有精密检测器,因此,当发生碰撞、冲击时可能会引起故障,在对库卡
发表于 09-26 16:51
工业机器人组成结构相关资料分享
工业机器人是近两年机械行业最热的字眼,随着企业工业机器人的增多,很多机械工程师对于工业机器人充满了好奇。作为机器人四大家族之一的KUKA,已
发表于 07-05 06:44
机器人系统与控制需求简介
第二章 机器人系统与控制需求简介2.1 工业机器人的系统组成机械本体:精密减速机、伺服电机、伺服驱动器、控制系统(核心零部件)控制柜示教盒2.2 机器人本体结构与传动方式简介四大家族:
发表于 09-08 07:44
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
发表于 10-21 20:59




评论