 聊聊C2机器人的校零
聊聊C2机器人的校零

最近在校正C2机器人时遇到了一个小事故,机器人的EMT坏了,反复校正零点报校正超时.
今天我们就聊聊C2机器人的校零.
为什么要校零?
1.当机器人校正的时候,各个轴就可以运动到一个特定的机械位置,也就时所谓的机械零点。
2.一旦机器人运动到机械零点,各个轴上的绝对编码盘的值就被保存下来了。
机器人零位校正后,可以用直角坐标系移动机器人或运行程序;同时机器人也知道软限位的位置.
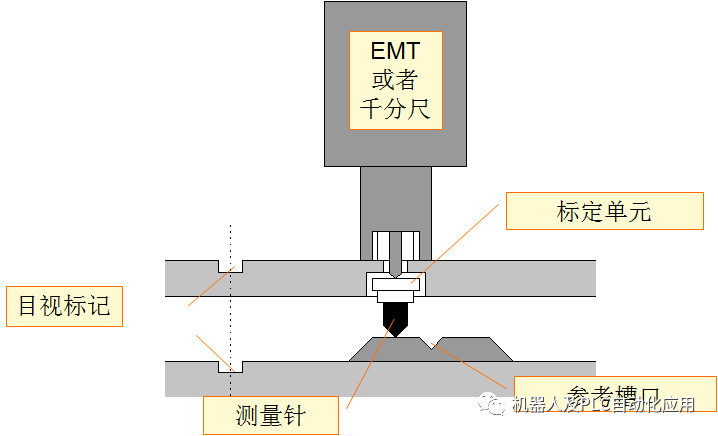
校零装置:
1.EMT
2.千分表
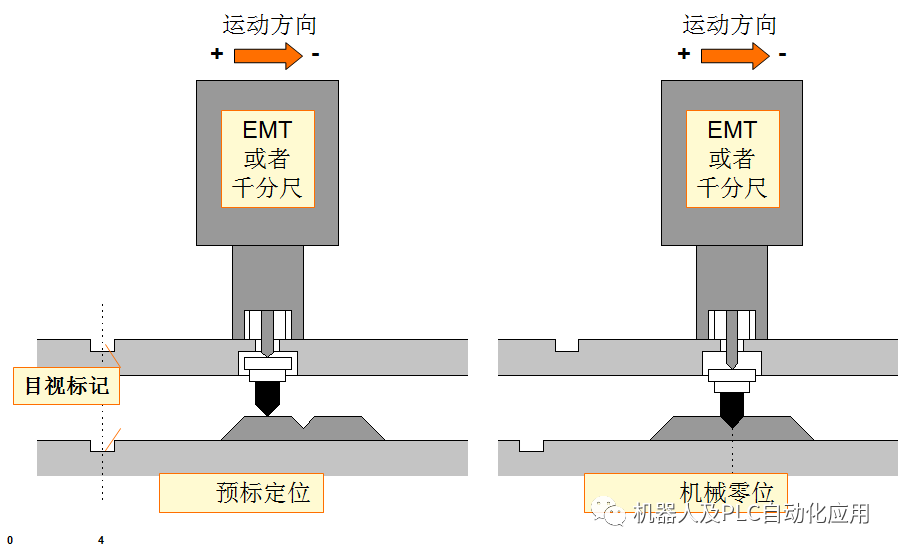
控制运行过程示意:
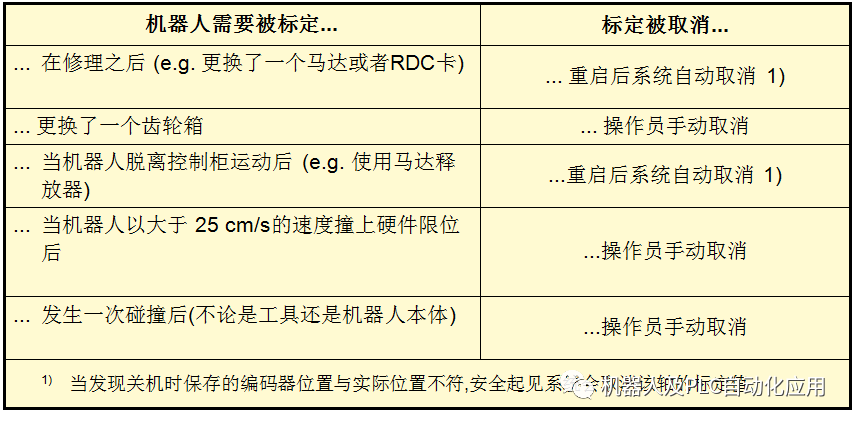
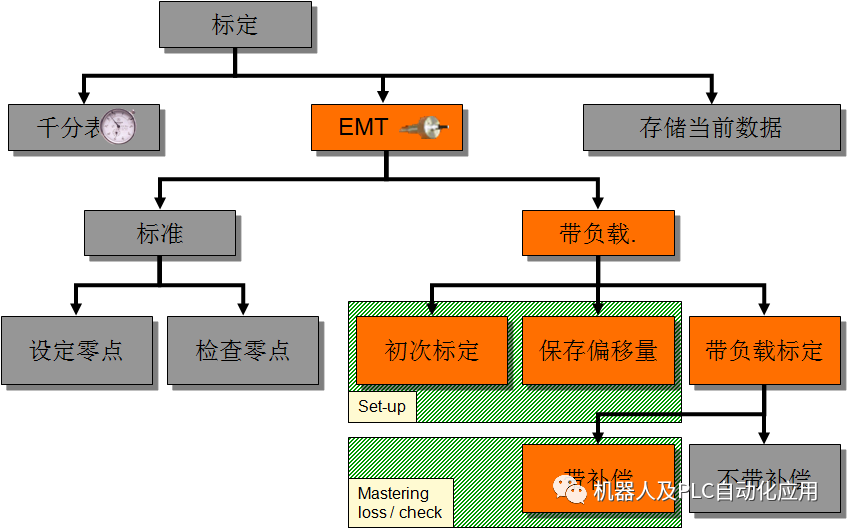
重新标定的情况:

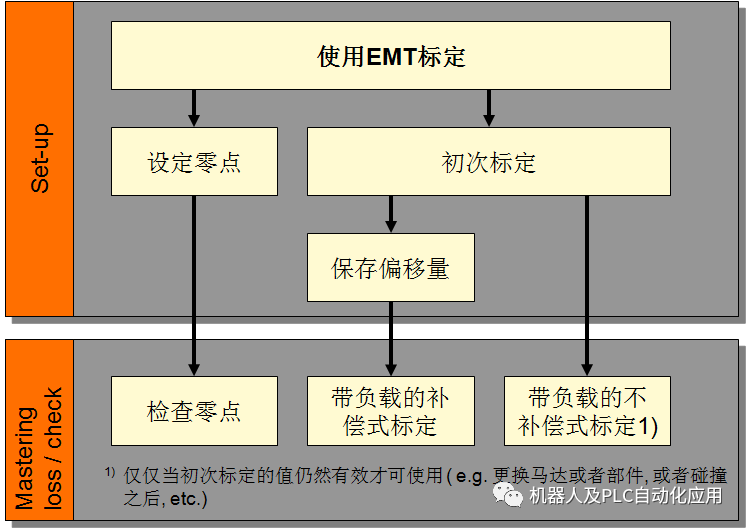
使用EMT标定:
•把需要标定的轴移动到预标定位 (如图所示白线位置)
•使用轴坐标系移动机器人各轴
•每个轴的标定是独立的

•从1轴开始往上标定
•每个轴总是从正向往负向运动
•仅仅在T1模式下!

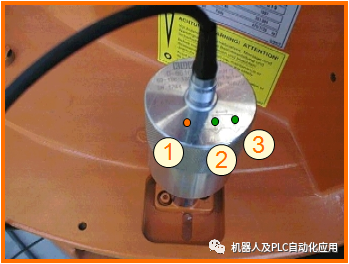
•摘掉标定单元的保护盖
•接上EMT 并连上信号线(另一端连接到机器人底座上的连接盒接口 X32上)

•EMT上有三个指示灯:
1. 红色 - 错误
2.绿色 - 下降沿
3. 绿色 - 上升沿
标定菜单:
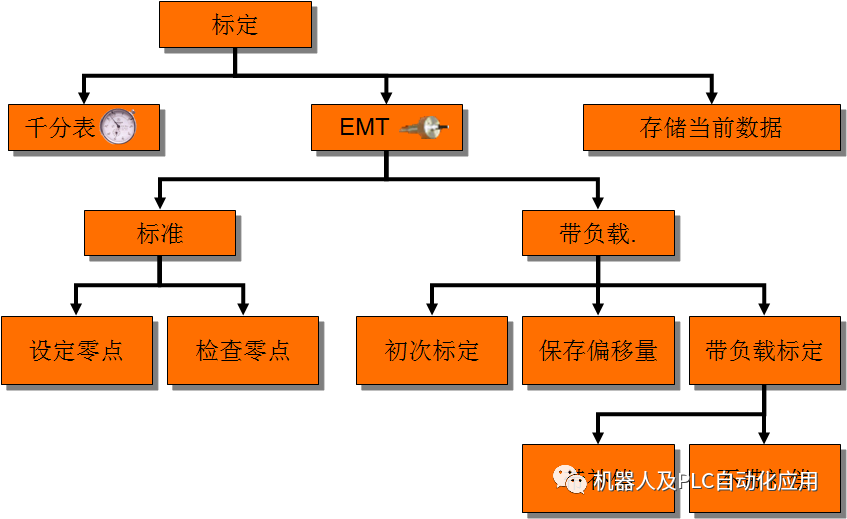
对于精确定位机器人的标定:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
215文章
31723浏览量
224773 -
机械
+关注
关注
8文章
1777浏览量
44122 -
自动校零
+关注
关注
0文章
2浏览量
5610
原文标题:KUKA-C2机器人-校零
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
揭秘人形机器人成本构成:这三个核心零部件,决定了它能走多远
,人形机器人的本质是一台极其精密的 机电一体化系统。它能不能走稳、能不能抓牢、聪不聪明,不取决于外壳多好看,而取决于三大核心零部件——它们也是人形机器人成本最高的部分(合计占比超过60%-70
发表于 06-01 17:54
人形机器人关节扭矩传感器的详细应用场景及解决方案
详细应用场景
高精度力控与柔顺操作(上肢与手部)
场景描述:机器人需要抓取鸡蛋、拧螺丝、装配精密零件或使用人类工具。若仅靠位置控制,极易损坏物体或自身。
传感器作用 :实时感知末端工具与工件接触
发表于 05-20 17:40
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
你有没有好奇过:机器人是怎么做到像人手那样精细装配零件的?人形机器人又为什么能稳稳捏住一颗鸡蛋,却不会把它捏碎?
答案其实藏在一个小小的“秘密武器”里——它叫 六维力传感器 ,你可以把它想象成
发表于 04-29 16:29
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
机器人在每毫秒都能“感知”到自己被推、拉或碰到东西。
正是这种连续、精准的力觉反馈,让机器人实现了三大关键能力:
1. 柔顺控制:像人手一样“顺着来”
传统机器人遇到意外阻力会硬顶,容易损坏零
发表于 04-17 17:27
在 VisionFive 2 上实现机器人伺服控制
据StarFive介绍,开发者已经在VisionFive/VisionFive 2上成功实现了机器人伺服控制,具体说明如下:
1. Preparation
Development board
发表于 03-05 07:09
小型自重构机器人能不能帮忙做一个?
要 **哪种小型自重构机器人**?
我给你选了3个最容易做的:
1. **微型蛇形自重构(最简单,推荐)**
2. **双向铰链模块(最标准)**
3. **磁吸拼接小车(最酷)**
你说**1 / 2 / 3**,我立
发表于 02-21 19:24
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
科技:《武 BOT》:H2人形机器人31个高精度关节、单臂7自由度,完成醉拳、双截棍、舞剑,同步误差**< 0.1秒;核心是高功率密度伺服电机+高速控制+**强散热。
**魔法原子:《智造
发表于 02-17 14:07
资讯速递 | 具身智能PMC(筹)发布“零成本”开源鸿蒙智能机器人系统
面向具身智能机器人系统与应用开发,Ubuntu 等操作系统可以用 ROS2 生态、机器人仿真器、英伟达算力。 然而在国产化方面,开源鸿蒙操作系统缺失 ROS2 支持、缺失与

机器人内部零配件的生产加工厂从哪找?
机器人内部零配件生产厂家哪里找?东莞力存科技为您揭秘数控车床加工的关键要素
随着机器人文化在中国的快速普及,机器人市场呈现出爆发式增长态势。据最新市场数据显示,2025 年全球智能
发表于 12-09 18:22
探索RISC-V在机器人领域的潜力
利用Gazebo仿真环境(在x86主机上运行)和MUSE Pi Pro上的ROS 2节点进行了联合仿真。
• 场景: 在PC的Gazebo中运行一个TurtleBot3机器人模型,MUSE Pi
发表于 12-03 14:40
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
2025 世界人形机器人运动会于 8 月 17 日圆满收官,赛场上机器人在跑步、跳跃、抓取等项目中的精彩表现,背后是运动控制、环境感知等技术的迭代升级。而在这些技术中,磁传感器芯片凭借独特优势,成为
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
江智机器人公司自制的常用机器人及其主要零部件检测装备
1宗旨江智机器人公司自2016年开始生产机器人至今近10年,已根据自己机器人实际订单需要,自行研制开发生产了机器人以及主要零部件的出厂检验用




评论