 叉式移动机器人(AGV/AMR)整体解决方案
叉式移动机器人(AGV/AMR)整体解决方案

叉式移动机器人(AGV/AMR)是在叉车上加载各种导引技术,构建地图算法,辅以避障安全技术,实现叉车的无人化作业。

▲ 叉式移动机器人无人化作业
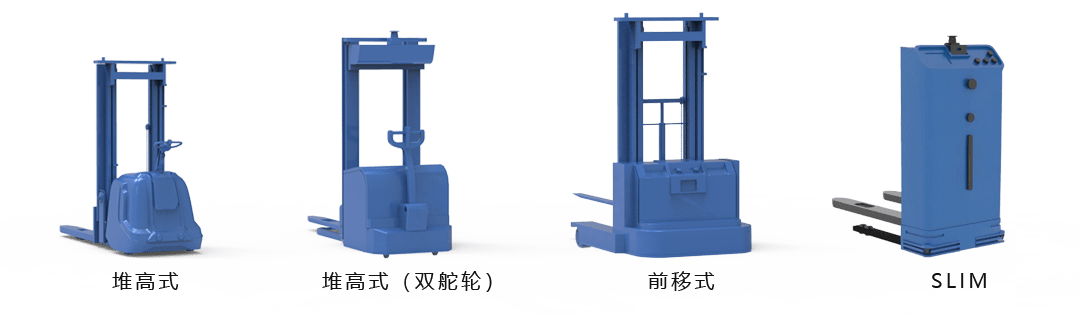
▲叉式移动机器人常见车型
叉式移动机器人在行业初期,各机构、企业所使用的控制系统大多来自海外,随着国家提出加强创新投入,规避产业链核心技术“卡脖子”风险,以及智能物流系统逐渐成熟和市场化需求的改变,物流设备智能控制管理系统的国产化成为行业共同关注的重点。
目前叉式移动机器人的一些关键零部件,如电机、驱动器、传感器和控制器仍然非常依赖国外进口,急需高品质的国产化方案。
科聪叉式移动机器人解决方案构成:
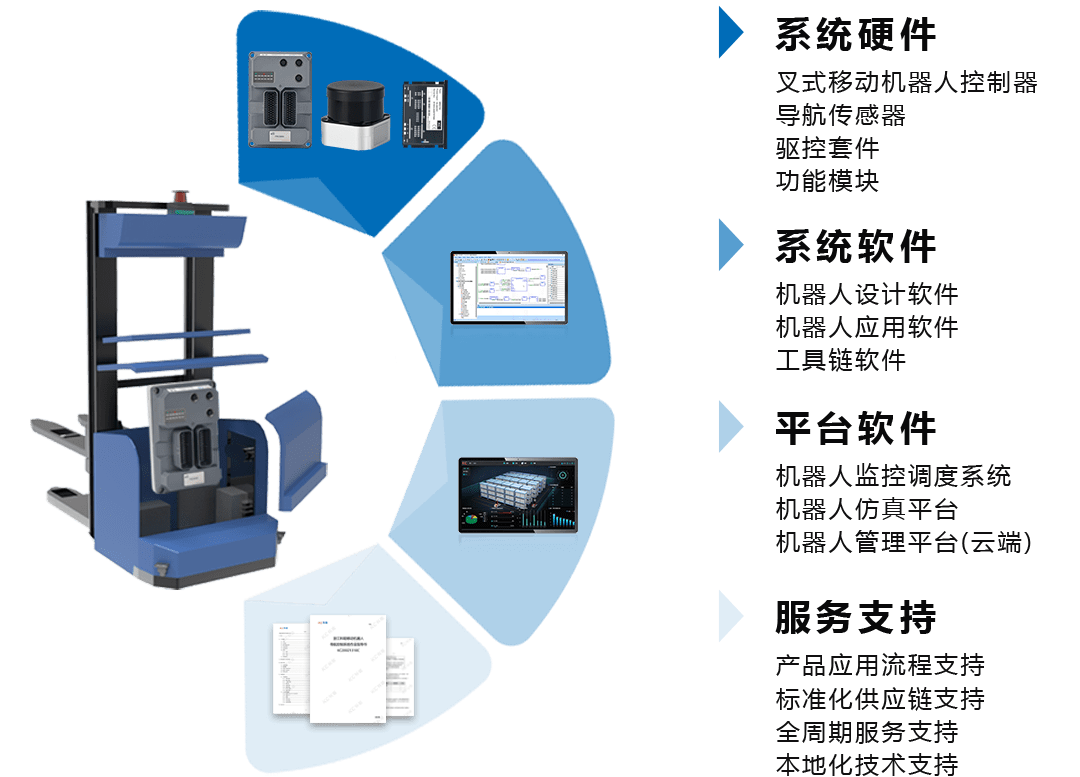
以科聪叉式移动机器人为核心的解决方案有何强势之处?
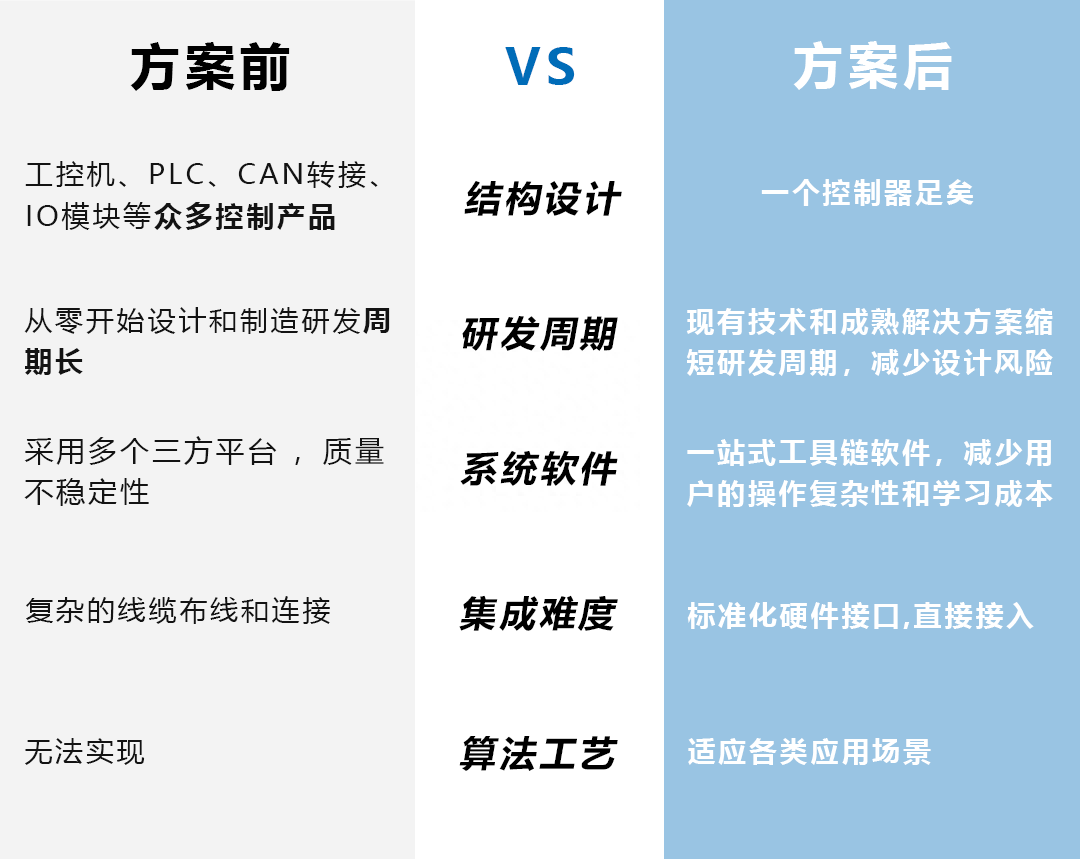
叉式移动机器人解决方案可以轻松面对不同叉车类型和众多应用场景的制造和应用。帮助制造商和终端用户降低构建移动机器人的复杂性,降低成本、提高生产效率、改善质量控制降低维修成本等。
关于叉式移动机器人控制器:
4核处理器,集成全自主可编程内核和图形化低代码应用开发环境编程器
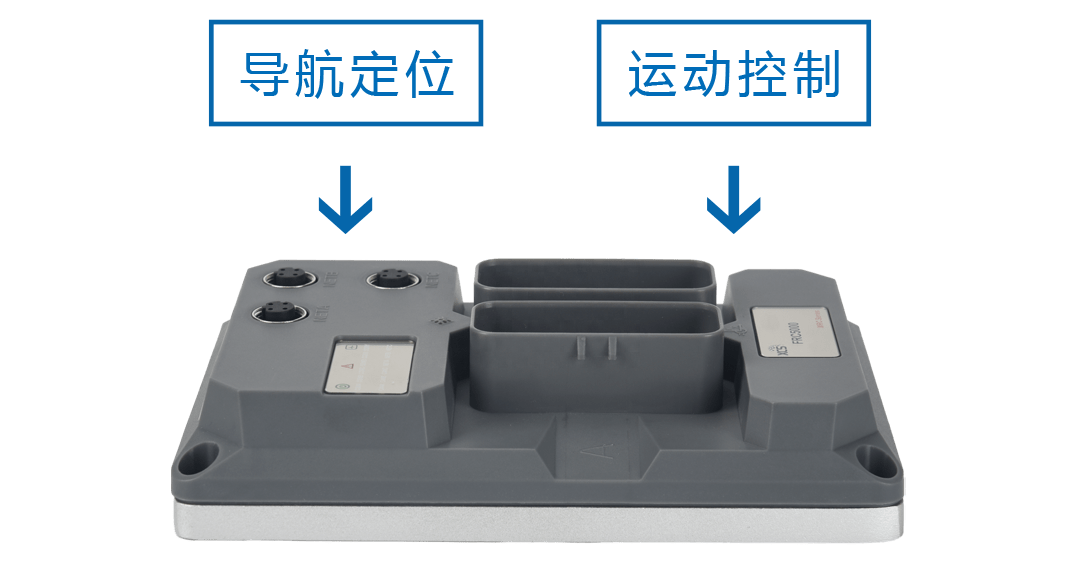
内嵌导航定位算法
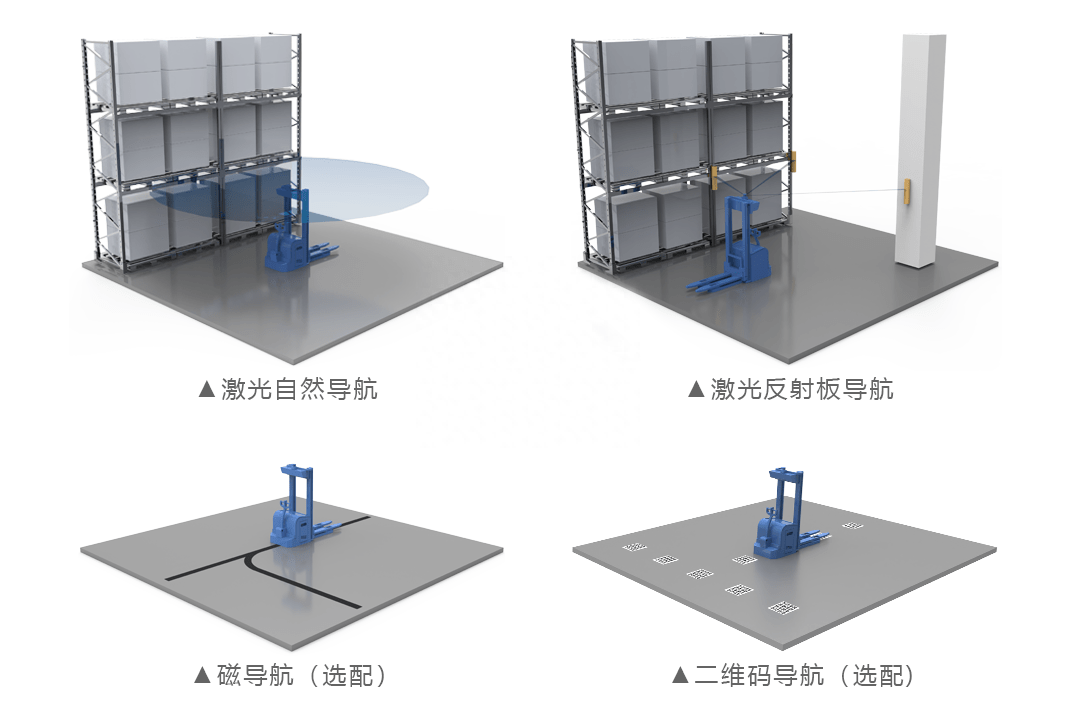
支持激光导航、磁导航(选配)、二维码导航(选配)
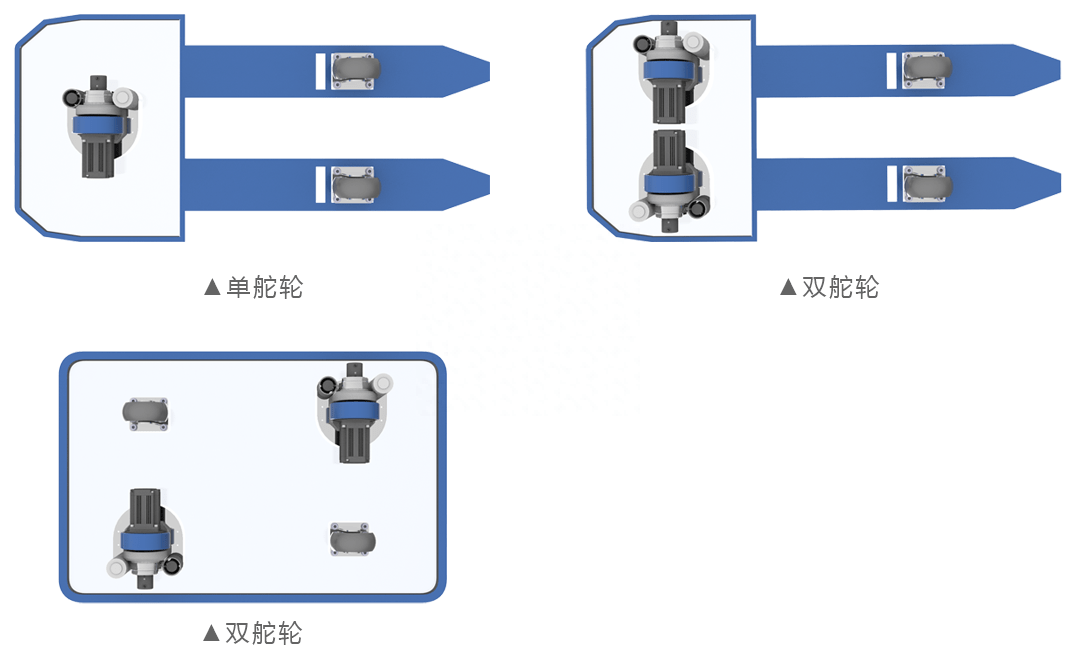
内嵌运动控制算法
支持单舵轮、双舵轮
内嵌工艺算法
支持各类型场景应用功能,栈板识别、视觉定位、标志物二次定位、导航激光辅助避障、3D视觉避障等
▲导航激光辅助避障
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
解决方案
+关注
关注
0文章
547浏览量
41766 -
AMR
+关注
关注
3文章
497浏览量
32349 -
移动机器人
+关注
关注
2文章
820浏览量
34978 -
AGV
+关注
关注
28文章
1587浏览量
43864
发布评论请先 登录
相关推荐
热点推荐
大象机器人正式发布myAGV Plus新一代移动机器人平台
恰逢教育部等五部门联合发布《“人工智能+教育”行动计划》,推动人工智能人才培养体系全学段重构的关键节点,大象机器人正式发布myAGV Plus——面向教学实验、科研开发、算法验证、智能巡检及机器人竞赛等场景的新一代移动机器人平台
为移动机器人量身定制的RK3588工控机,保障AGV与AMR稳定运行
随着智能制造与智慧物流的迅猛发展,AGV和AMR已成为工厂和仓库中不可或缺的“搬运工”。这些移动机器人的核心,是一套集导航定位、运动控制、环境感知、任务调度于一体的强大控制系统。针对这一特殊应用场景,NIS-5130-

基于瑞芯微RK3588的高性能AMR机器人核心计算平台解决方案
一、 方案概述 随着自主移动机器人(AMR)在工业物流、商业服务、特种作业等领域的广泛应用,其对核心控制器的算力、实时性、扩展性和可靠性提出了前所未有的高要求。传统的解决方案往往面临算

探索 NXP MR - CANHUBK344 评估板:为移动机器人应用赋能
探索 NXP MR - CANHUBK344 评估板:为移动机器人应用赋能 在电子工程的世界里,不断有新的硬件产品涌现,为我们的设计带来更多的可能性。今天,我要和大家深入探讨一款专为移动机器人
MR-BMS771参考设计:适用于移动机器人的电池管理系统
MR-BMS771参考设计:适用于移动机器人的电池管理系统 一、引言 在移动机器人领域,可靠的电池管理系统(BMS)至关重要。NXP的MR - BMS771参考设计为工程师提供了一个出色的解决方案
Infineon移动机器人电机控制方案深度解析
和稳定性。今天,我们就来深入探讨Infineon的移动机器人电机控制解决方案,具体涉及DEMO_IMR_MTRCTRL_V1和DEMO_ANGLE_SENS_V1这两款开发板。 文件下载
Infineon DEMO_IMR_BMSPWR_V1:移动机器人电池管理系统的卓越之选
Infineon DEMO_IMR_BMSPWR_V1:移动机器人电池管理系统的卓越之选 在当今科技飞速发展的时代,移动机器人在物流、仓储、医疗等众多领域发挥着越来越重要的作用。而电池管理系统
Infineon DEMO_IMR_BMSCTRL_V1:助力移动机器人电池管理的创新方案
Infineon DEMO_IMR_BMSCTRL_V1:助力移动机器人电池管理的创新方案 在当今科技飞速发展的时代,移动机器人在各个领域的应用越来越广泛,从物流仓储到医疗服务,它们的身影无处不在
移动机器人“芯”引擎爆发,禾赛、海思新品逆袭
GGII预计,2025年中国移动机器人销量有望达到12.6万台,总量同比增长约12.7%。这也催生了对上游激光雷达的需求。本文将重点介绍智能物流体系中移动机器人的雷达性能要求和新品。

安森美产品如何助力打造下一代自主移动机器人
类员工严格隔离的。不过,细心的小伙伴会发现,随着新一代自主移动机器人(AMR)的出现,机器人在人们心目中的刻板形象正在被打破,它们正在被赋予新的含义,并开始真正走入我们的生活。
移动机器人技术的发展历程
本白皮书聚焦于移动机器人领域的进展与挑战,重点探讨三个核心主题:机器人运动控制、复杂环境中的感知与导航,以及在适应新任务时的模块化与灵活性。此外,文中还重点介绍了机器人系统从简单的固定机械臂到复杂人形
恩智浦自主移动机器人设计要点
长期以来,自动化机器人一直被视为科幻小说中的概念,而如今这一技术已成为现实,并正在大规模部署。在机器人技术领域,自主移动机器人 (AMR) 是发展最快的创新技术之一。

自主移动机器人千亿市场角逐,谁在抢占C位?
全球电商爆发、劳动力成本攀升与柔性供应链需求浪潮,正强力驱动仓储自动化升级。在这一追求存储密度、拣选效率和灵活部署的变革中,自主移动机器人(AMR)凭借无与伦比的柔性与可扩展性,迅速赢得市场认同
瑞芯微 RK3568/3588:为移动机器人注入智慧动力引擎
移动机器人,正从科幻想象快步走入现实生活。它们依据应用场景与功能,主要分为三大类: 工业移动机器人: 如AGV(自动导引车)、AMR(自主移动机器人
轮式移动机器人电机驱动系统的研究与开发
系统,开发了一套二轮差速驱动转向移动机器人电机驱动系统,完成了系统各部件的整体装配和调试。试验结果表明,该设计方案可行、系统运行稳定可靠、成本低廉、所用元件易于购置,具有较好的实用的价值和应用前景。
纯
发表于 06-11 14:30



评论