 布局位置感知
布局位置感知

UWB场景化定位
从2G转到2B,市场和产品都是全新的认知;从做项目级产品到做满足广泛需求的产品,对于研发、营销、推广、生产更是全新的挑战。
什么是项目级产品:满足特定市场和特定客户需求的产品
此类产品往往比较依赖资源关系,产品利润可以保证,适合产品公司起步,原始积累;但从长期看有问题,不太适合产品公司发展壮大,过于依赖资源关系,产品的市场充分竞争不够,导致后劲不足;
往往这类公司发展方向:为特定市场客户提供产品+服务的发展模式;巨视公司前十年都是项目级产品服务特定市场的政府客户,我们先后为世博、迪斯尼、北京亚运会、六十年大庆、北京/上海/深圳平安城市、江苏高速公路、上海地铁等行业客户提供产品。
这几年国家的投资从政府转向涉及到国计民生的大型企业,从国家基础建设投资转向重点领域企业和行业投资,从国企央企做大到做强,从平安中国到数字中国,未来企业和涉及电力、能源、化工、钢铁等涉及资源类行业的科技创新以及数字化将是投资和发展的趋势;
这也驱动着我们调整产品思路,探索满足广泛需求产品的产品公司发展道路;

什么是满足广泛需求的产品:基于某一种技术,解决一类需求,具有广泛市场机会,产品具备广泛复制性;
这类产品一种是走生产制造、规模化成本优势道路;另一种是基于本身技术优势,技术和产品都同时具备长期发展迭代升级趋势,以市场不断发展,机会不断扩大的趋势;
第一类产品PK的生产制造以及成本管理控制;第二类产品PK的技术路线的选择,以及产品方向的把握、以及技术和产品不断迭代;
安防行业在发展初期的时候,视频监控还没有被广泛认知,当时海康和大华从视频采集卡布局,伴随着十多年的视频监控被广泛认知、视频技术和标准不断发展,带动了安防产业的壮大,造就了产品系列化、规模化以及国际影响力的大公司;这是技术方向、产品思路以及机会把握和伴随公司不断运作壮大的成功典范。
华为更是从语音交换机到光纤通讯、网路交换机到Wireless产品,再到终端以及5G,布局AI等,每个阶段需求和技术方向准确把握才能有机会成为有底蕴、有竞争力的、国之栋梁的伟大公司。华为是所有科技产品公司的学习榜样和典范。
布局位置感知、着眼UWB产品
位置信息是出来语音、数据、视频以外又一个和每个人息息相关的数据,市场前景可能不如语音、视频那么广泛,但也是一个不可小视的属性;
基于GNSS的室外定位技术,依托导航应用,已经被广泛认知;室内和区域位置空间感知还是在发展初期阶段,由于技术路线包括RFID、蓝牙、UWB等,从技术到方案,从解决具体需求问题到融合赋能其他系统,还在被市场逐步认知的过程阶段;
相比RFID、蓝牙,UWB在位置感知的技术优势过于明显,也意味UWB技术才是未来室内和区域位置空间感知的关键技术。

UWB技术特点
安全通信- 与一般无线电通信信号相比,超宽带信号可能更为隐秘,也更难检测到,UWB信号相当于白噪声。超宽带信号占用较大带宽,信号能量分布在极宽频带范围内,一般其功率谱密度低于自然的电子噪声,检出UWB信号较为困难,而采用编码对脉冲参数进行伪随机化后,脉冲的检测将更加困难。
多径效应- 在复杂的环境中,UWB由于具有较宽的传输带宽,可以抵御多径衰落。由于常规无线通信的射频信号大多为连续信号或其持续时间远大于多径传播时间,多径传播效应限制了通信质量和数据传输速率。而超宽带无线电发射的是持续时间极短的单周期脉冲且占空比极低,多径信号在时间上是可分离的。
精准无线测量-基于TWR测距精度可达10厘米以内、纳秒级精度的达到时间、高达1度以内的到达角测量;
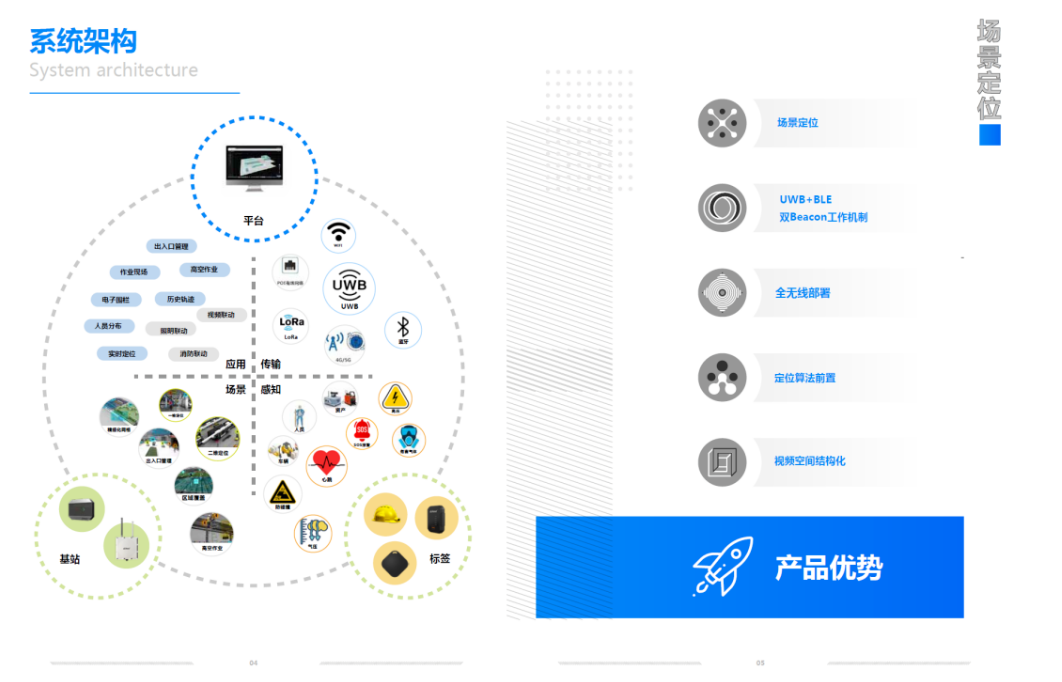
巨视UWB产品技术路线
场景定位而非坐标定位
不同于行业内的UWB定位解决方案场景,立足UWB的TOF测距精度以及稳定性优势、TOA纳秒级的高精度优势、PDOA小型化和高精度角度测量优势;抛弃了传统的三角定位技术路线,集合上海交通大学、武汉大学以及上海海事大学的算法研究优势,推出了基于UWB及其学习和深度学习的全新的定位算法技术路线;
实现各种场景下的位置感知,包括出入口、电子计时、网格化、电子围栏、防碰撞、多智能体自定位等各种场景化位置感知,同时兼容一维和二维坐标定位;
更是积极和海康、大华、霍尼韦尔等国内外知名的安防监控综合解决方案供应商配合,提供目前位置空间感知数据,赋能视频监控系统,实现基于目标的视频跟踪和录像快速检索的功能;

对于UWB技术,以及室内或区域位置空间感知,市场还有个认知过程,需求和解决问题还是一个探索过程,在这个阶段不易采用传统的投入大、实施复杂的UWB坐标定位系统,而是从小的碎片化场景位置感知需求从发,让市场了解UWB技术特点,以及能解决的问题,才能为未来UWB技术广泛使用打好基础。
快速部署位置感知:全无线部署+定位算法前置
巨视一致致力于探索和研发快速部署位置感知系统,基于定位算法前置基站、全无线通讯方式部署以及基站内置电池等设计,实现了类似电力变电站维修/检修、铁路检修工地等流动性工地现场的人、车、物的位置空间感知的功能,实现了科学的技防手段提升管理效率;
巨视是目前市面上UWB技术方案厂家为数不多的,不需要定位引擎服务器,将各种定位算法的实现都前置在定位基站的厂家;也是为数不多支持全无线部署的UWB方案厂家;这都为简化系统实施部署,提高系统的稳定性以及第三方集成带来优势。
产品是一条艰辛的市场过程:产品验证技术,市场检验产品;提供解决需求的高性价比的产品才是市场真正需要;
审核编辑 黄宇
-
蓝牙
+关注
关注
119文章
6226浏览量
177573 -
定位
+关注
关注
5文章
1554浏览量
36523 -
UWB
+关注
关注
32文章
1245浏览量
64668
发布评论请先 登录
2025瑞声科技感知技术峰会成功举办
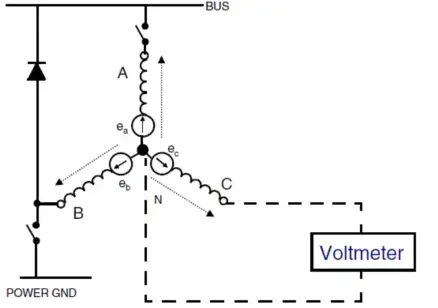
CW32电机控制基础——无感BLDC的转子位置检测
自动驾驶感知不一致是怎么发生的?

网格布局介绍
HarmonyOS NEXT应用元服务布局优化ArkUI框架执行流程
HarmonyOS NEXT应用元服务布局合理使用布局组件
绝对位置感知的机器人多关节模组高精度运动学解算与动态误差补偿
从控制到感知,一文读懂纳芯微的人形机器人布局(上篇)

DC-DC 的 PCB布局设计小技巧
VirtualLab Fusion应用:光导布局设计工具
使用安森美NCS32100PCB设计工具提高位置传感器系统精度
射频电路布局有哪些原则
40个激光雷达!苹果布局机器人感知系统,让碰撞降低63.7%

无人AGV叉车是怎么判断货物位置的?建议收藏






 工商网监
工商网监
评论