 RJSII40关节模组——超大力矩,输出更强劲
RJSII40关节模组——超大力矩,输出更强劲

泰科智能机器人于2016年转型生产,作为一家以机器人关节研发为起点的机器人企业,一直致力于机器人关节研发,推出的多系列关节模组,并获得国内高校及机器人公司高度认可。
为应对协作机器人多变的工作环境,增强协作机器人适应性能,泰科在2019年底推出RJSII系列关节模组,采用全新的关节设计,具有更好的散热性能和力矩输出能力及稳定性,同时也提升了关节的防护等级,使之可以更好的应用于各种苛刻的工作环境,目前主要应用于小负载的协作机器人。
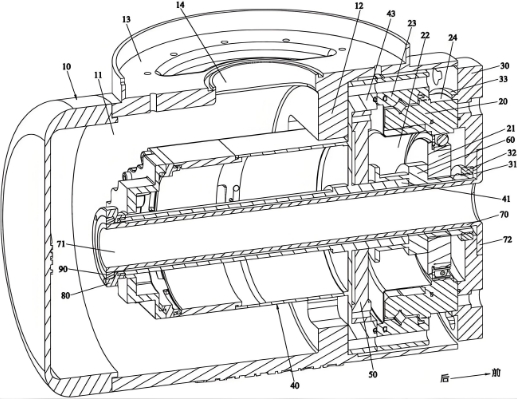
为满足大负载协作机器人需求,泰科最新推出RJSII系列新型RJSII40关节模组,采用额定功率为1050的无刷伺服力矩电机和品牌减速器,在确保RJSII40关节模组的输出性能及强大的负载转矩能力,更具稳定性。
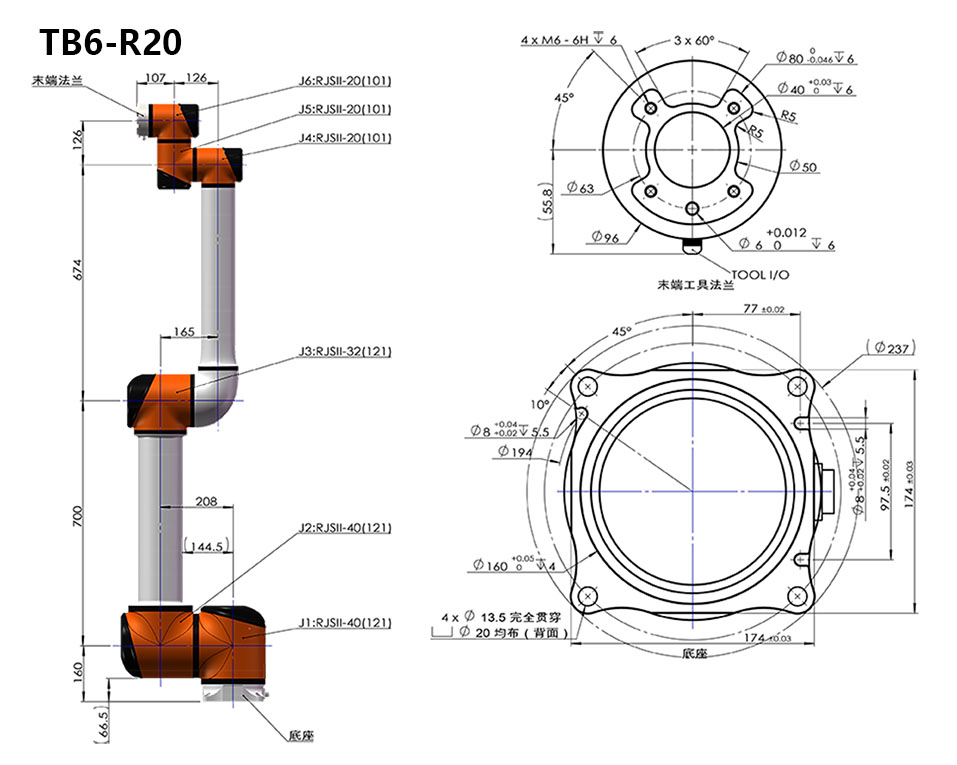
RJSII40模组本体重量高达17kg,专业应用于负载20kg工业协作机械臂上,在确保1500mm的工作半径同时,很好的降低了机械手臂的重心,增强了稳定性和提高臂的负载能力。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31442浏览量
223651 -
模组
+关注
关注
6文章
1797浏览量
32358
发布评论请先 登录
相关推荐
热点推荐
人形机器人关节模组关键技术解析,及产业链上游电机/传感器企业一览
置,用来控制机器人模仿人类头部、手臂、腿部等的旋转、俯仰、弯曲、伸展、摆动等动作。 人形机器人关节模组主要有旋转关节模组和线性关节

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
。有了扭矩传感器,机器人能实时检测力的大小和方向,自动调整姿态。例如,在人形机器人的腿部关节,传感器以1千赫兹的频率感知地面反作用力,瞬间调整输出扭矩,实现稳定行走和上下斜坡。2. 安全协作:碰撞即停
发表于 04-17 17:27

从“能动”到“好用”,人形机器人关节模组决定性能,也决定未来
关节模组是机器人的“运动枢纽”, 连接并驱动各个部件,实现流畅的运动。根据机械工程原理,关节模组的关键在于将电能转化为机械运动,并且确保精确控制和稳定性,这直接决定了动作的精确度和可靠

高性能人形机器人关节模组选型的关键技术要素
人形机器人关节模组一般是集传动装置、驱动器、电机、抱闸、编码器以及力矩传感器等于一体的精密部件,负责驱动和控制人形机器人各个关节精确实现拟人化动作的核心执行单元,其性能直接决定了机器人

协作机器人关节模组空间紧张?高密度MLCC与功率电感方案
本文解析平尚科技高密度MLCC与功率电感集成方案,通过超薄堆叠MLCC、非晶磁粉电感及共腔封装技术,在8×8mm空间实现100μF+22μH的超紧凑设计。结合关节模组实测数据,展示体积缩减78%、纹波降低76%的突破,并阐述激光微孔与真空焊接工艺对可靠性的保障。
力矩电机在机器人身上发挥什么作用?
什么是力矩电机 是一种用于直接驱动荷载且无需任何传输机制的电机。它们主要通过高能永磁产生高力矩。而应用在机器人上我们要用到无框架的力矩电机,它可以很好的集成到系统内。 力矩电机应用作

机器人关节模组:类型、设计、工作原理及应用
机器人关节模组是一种用于驱动机器人关节转动、轮子旋转或控制夹爪运动的装置。根据负载需求,机器人关节模组有多种类型。负载通常涉及扭矩、精度、操

基于MT6816单芯片磁编码的机器人关节模组一体化设计
随着机器人技术的快速发展,关节模组的性能直接决定了机器人的运动精度和响应速度。传统的光电编码器虽然精度较高,但在抗污染、抗振动等方面存在明显短板。本文将详细介绍一种基于MT6816单芯片磁编码器
电机带负载是直接用轴连接输出力大还是用齿轮输出力矩大?
在工业生产和机械设计中,电机作为动力源的核心部件,其输出方式的选择直接影响整个系统的性能表现。关于电机带负载时采用直接轴连接还是齿轮传动更有利于输出力或力矩的问题,需要从传动原理、机械特性、应用场

小身材,大力气!名片大小的插板式模组200W以上功率输出!
工业场合,可靠性为王!ZIOC-E0016D插板式模块通过插入定制分线底板的从站模组,可驱动16组24V灯泡,输出功率达200W/8A。它是如何实现驱动的?本文将为您详细讲解。插板式模组为满足个性化

嵌入式力矩电机的设计方法研究
与力矩的关系曲线,然后提出适合于机床部件嵌入式力矩电机的力短设计经验参考公式。通过有限元款件对电机模型的分祈和对样机输出力矩的测试,验证了设计的合理性。
纯分享帖,需要者可点击附件免费获取完整资料
发表于 06-11 15:08
混合励磁同步电机低速大力矩控制策略的研究
纯分享帖,需要者可点击附件免费获取完整资料~~~*附件:混合励磁同步电机低速大力矩控制策略的研究.pdf【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!
发表于 05-29 14:07
102.85Nm/kg扭矩密度突破!无框力矩电机如何定义人形机器人关节性能极限
电子发烧友网报道(文/李弯弯)无框力矩电机是一种将传统电机的定子和转子分离设计、去除外壳和轴承的电机形式,具有高集成度、高扭矩密度和灵活安装的特点,广泛应用于机器人关节、航空航天、高端数控机床等领域
为什么直流力矩电动机转矩大、转速低?
直流力矩电动机是一种特殊设计的直流电机,其核心特点在于能够提供大转矩而保持较低的转速。这种特性使其在需要精确控制和高扭矩输出的场合(如机器人关节、航空航天设备、医疗仪器等)中具有不可替代的优势。要




评论