 科瑞特(CRT)3~6轴抛光运动控制示教系统
科瑞特(CRT)3~6轴抛光运动控制示教系统

一、CRT3-6轴控制系统功能及应用简介
系统采用全示教操作方式,降低用工门槛,大屏触摸操作,傻瓜化、上手快;
硬件可选3~6轴。多轴联动,轻松实现3轴螺旋插补,3~6轴直线插补;
大存储空间,内置512个程序自由切换,每个程序默认200个动作步序;
可针对客户做定制开发以满足特殊需求;
适用于拉丝、打磨、抛光等工艺,可用于手机壳毛边打磨、不锈钢餐具抛光、表壳抛光等。
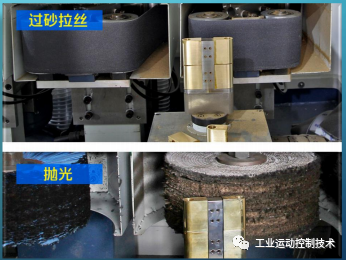
过砂拉丝抛光
二、系统操作界面功能介绍
1、主界面
手动操作、参数设置、程序浏览、运行画面,四个模块组成。
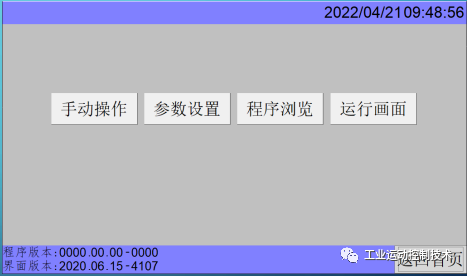
主界面
2、手动界面
实现各轴手动操作和IO点的状态显示。
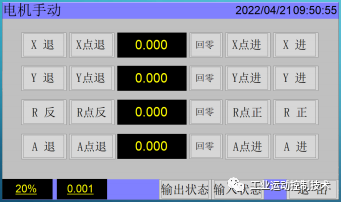
电机手动
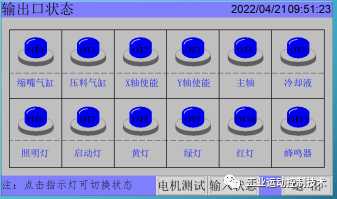
输出状态

输入状态
3、运行状态界面
运行状态监控,整机启停操作。

运行状态
4、参数设置界面
基本运动参数、各轴硬件参数、系统功能配置参数、用户权限参数。
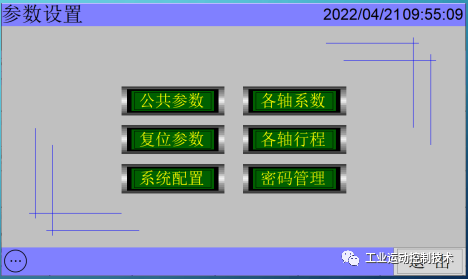
参数设置
5、程序编辑界面
程序选择与切换,动作步序的编辑;
基本动作:轴单动、直线联动、圆弧联动、IO动作、延时、循环,支持自由定制。

程序示教编辑
基本动作选项:轴单动、直线联动、圆弧联动、IO动作、延时、循环,支持自由定制。

基本动作选项
6、绝对坐标定位
3轴绝对坐标螺旋插补示教。
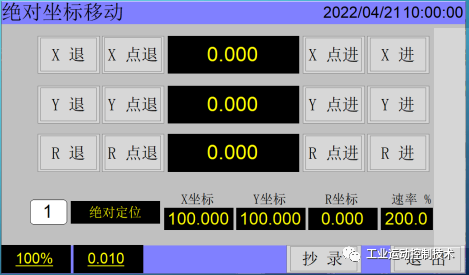
绝对坐标移动
7、自定义循环示例
20个计数器自定义循环,支持嵌套。

自定义循环
CRT示教控制系统具备强大的运算能力、极高的输出频率、大容量可扩展的数据储存空间,完全符合各种专用机及标准机发挥更高性能、更高效率的应用需求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制
+关注
关注
5文章
1035浏览量
125962
发布评论请先 登录
相关推荐
热点推荐
TMCM-3212:3 轴 ×3A×256 微步,双斜坡运动更平滑
3轴×3A×256微步TMCM-3212双斜坡运动更平滑一块板子管三个电机,选型时可以多看一眼。工程师做多轴方案时常面临一个取舍:用三块单

SDI录像机CM8004B:赋能示教领域,驱动技能教学数字化升级
在医学手术培训、工业自动化操作教学等示教领域,高清、稳定、精准的音视频记录与传输是保障教学质量的核心前提。传统示教设备常面临画质模糊、信号延迟、多设备适配性差等问题,制约了教学效果的提
TDK InvenSense IIM-20670:工业级6轴运动追踪MEMS器件的卓越之选
TDK InvenSense IIM-20670:工业级6轴运动追踪MEMS器件的卓越之选 在工业应用领域,对于高精度、高可靠性的运动追踪器件需求日益增长。TDK InvenSense
TDK IIM - 42653:工业应用中的高性能6轴智能运动跟踪MEMS器件
工业应用设计的高性能6轴智能运动跟踪MEMS器件,它集成了3轴陀螺仪和3
TDK IIM - 42653:高性能工业级6轴运动跟踪MEMS设备解析
TDK IIM - 42653:高性能工业级6轴运动跟踪MEMS设备解析 引言 在工业应用的浪潮中,对高精度、高性能运动跟踪设备的需求日益增长。TDK的IIM - 42653作为一款
IAM-20680HV:高性能汽车6轴运动跟踪设备解析
IAM-20680HV:高性能汽车6轴运动跟踪设备解析 在汽车电子领域,对于精确运动跟踪的需求日益增长。TDK的IAM-20680HV作为一款专为汽车非安全应用设计的
GraniStudio:单轴Jog运动例程
1.文件运行 导入工程 双击运行桌面GraniStudio.exe。 通过引导界面导入单轴Jog运动例程,点击导入按钮。 打开单轴Jog运动例程所在路径,选中单

GraniStudio:单轴PTP运动例程
打开,完成导入。 2.功能说明 实现轴1复位、单轴以相对运动模式走10毫米以及绝对运动走10毫米。 2.1通过初始化运控板卡算子连接格拉尼总线型运控卡,导入工程自动进行连接,此算子为使

运动控制轴和单轴控制区别怎么选?工业自动化工程师一文讲透!
在工业自动化项目里,运动控制这件事是绕不过去的技术核心。无论你是在做机器人、自动点胶机,还是搞多轴联动的数控系统,都会遇到一个让很多技术人员头大的问题:




评论