 地平线旭日X3派试用-玩转串口通信
地平线旭日X3派试用-玩转串口通信

旭日X3派开发板提供了40PIN标准接口,方便用户扩展外围设备。其中物理引脚编号8和10为串口通信发送和接收使用(8-TXD,10-RXD)。
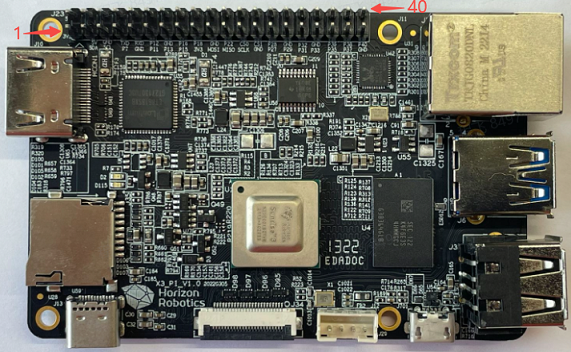
40PIN引脚功能和位置编号如下:

串口转USB设备引脚和功能描述如下:
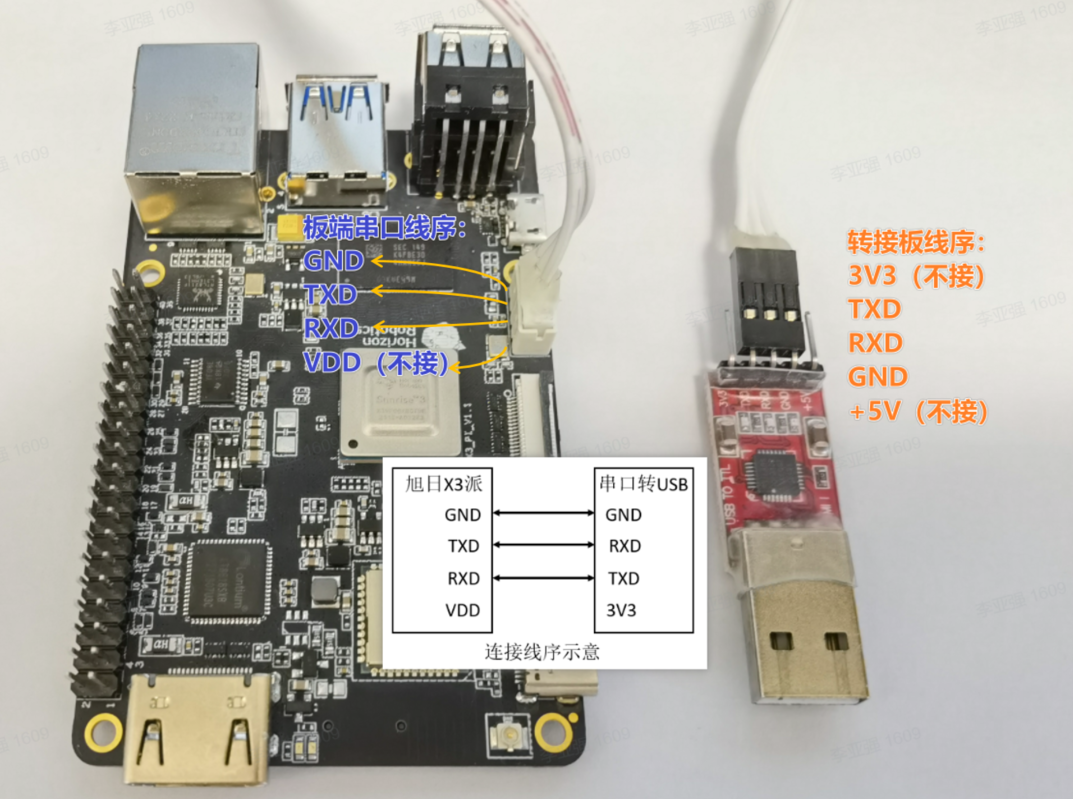
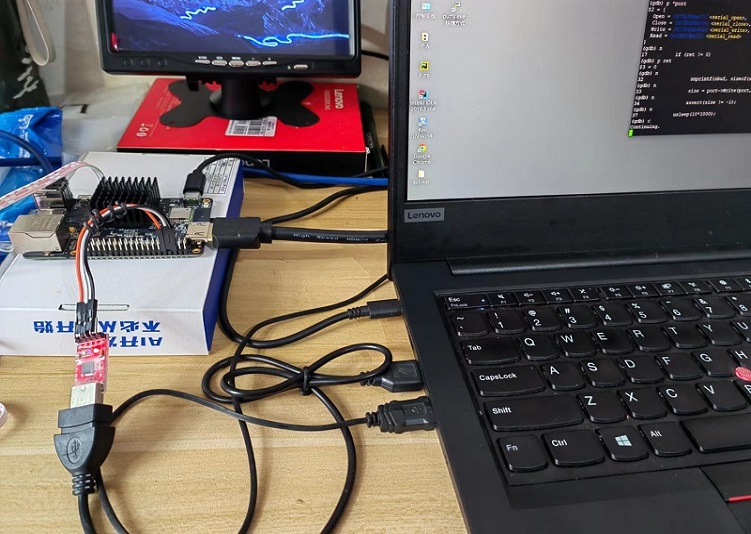
我们可以使用3根杜邦线 + 一个串口转USB设备(旭日X3派开发包附赠) + 一台笔记本电脑 + putty(串口工具)搭建串口通信开发环境。
如下图示:
1)6号管脚和串口转USB GND连接
2)8号管脚和串口转USB RXD连接
3)10号管脚和串口转USB TXD连接
从40PIN管脚功能图我们知道,8号和10号管脚为UART3,对应的设备文件为 /dev/ttyS3。
环境搭建完成后,我们来编写一个简单的程序库操作串口。
//头文件
#ifndef SERIAL_H#define SERIAL_Htypedef struct Serial Serial;struct Serial{ int (*Open)(Serial *pDevice, const char *sDevice, int baudrate); void (*Close)(Serial *pDevice); int (*Write)(Serial *pDevice, const char *buf, int len); int (*Read)(Serial *pDevice, char *buf, int len);};Serial* CreateSerialDevice();void DestroySerialDevice(Serial *pDevice);#endif //SERIAL
//实现文件
#include #include #include #include #include #include #include #include "serial.h"typedef struct SerialImpl{ Serial base; int handle; int baudrate; char sDevice[64];}SerialImpl;int speed_arr[] = {B1500000, B1152000, B1000000, B921600, B576000, B500000, B460800, B230400, B115200, B57600, B38400, B19200, B9600, B4800, B2400, B1800, B1200, B600, B300, B200, B150, B134, B110, B75, B50, B0};int baudrate_arr[] = {1500000, 1152000, 1000000, 921600, 576000, 500000, 460800, 230400, 115200, 57600, 38400, 19200, 9600, 4800, 2400, 1800, 1200, 600, 300, 200, 150, 134, 110, 75, 50, 0};int serial_setting(Serial *pDevice, int baudrate);void serial_close(Serial *pDevice);int serial_comspeed_get(int baudrate){ for (int i = 0; i < sizeof(baudrate_arr)/ sizeof(baudrate_arr[0]); ++i) { if (baudrate_arr[i] == baudrate) { return speed_arr[i]; } } return -1;}int serial_open(Serial *pDevice, const char *sDevice, int baudrate){ int handle = -1; SerialImpl *impl = (SerialImpl*)pDevice; if (!impl) { return -1; } if (!sDevice || sDevice[0] == '\0') { return -2; } handle = open(sDevice, O_RDWR, 0); if (-1 == handle) { perror("open"); return -3; } impl->handle = handle; snprintf(impl->sDevice, sizeof(impl->sDevice), "%s", sDevice); if (0 != serial_setting(pDevice, baudrate)) { serial_close(pDevice); return -4; } return 0;}int serial_setting(Serial *pDevice, int baudrate){ int handle = -1; int speed = 0; struct termios options; SerialImpl *impl = (SerialImpl*)pDevice; if (!impl) { return -1; } handle = impl->handle; if (handle <= 0) { return -2; } speed = serial_comspeed_get(baudrate); if (speed < 0) { return -3; } impl->baudrate = baudrate; if (tcgetattr(handle, &options) != 0) { perror("tcgetattr"); return -4; } if (cfsetispeed(&options, speed) != 0 || cfsetispeed(&options, speed) != 0) { perror("cfsetispeed"); return -5; } //no partity options.c_cflag &= ~PARENB; options.c_iflag &= ~INPCK; //8bits options.c_cflag |= CS8; //stop 1bits options.c_cflag &= ~CSTOPB; //no flow control options.c_cflag &= ~CRTSCTS; options.c_cflag &= ~CSIZE; if (tcsetattr(handle, TCSANOW, &options) != 0) { perror("tcsetattr"); return -6; } return 0;}int serial_read(Serial *pDevice, char *buf, int len){ int handle = -1; int size = 0; SerialImpl *impl = (SerialImpl*)pDevice; if (!impl) { return -1; } handle = impl->handle; if (handle <= 0) { return -2; } if (!buf || len <= 0) { return -3; } size = read(handle, buf, len); if (-1 == size) { perror("read"); return -4; } return size;}int serial_write(Serial *pDevice, const char *buf, int len){ int handle = -1; int size = 0; SerialImpl *impl = (SerialImpl*)pDevice; if (!impl) { return -1; } handle = impl->handle; if (handle <= 0) { return -2; } if (!buf || len <= 0) { return -3; } size = write(handle, buf, len); if (-1 == size) { perror("write"); return -4; } return size;}void serial_close(Serial *pDevice){ int handle = -1; SerialImpl *impl = (SerialImpl*)pDevice; if (!impl) { return; } handle = impl->handle; if (handle != -1) { close(handle); }}Serial* CreateSerialDevice(){ SerialImpl *pDevice = (SerialImpl*)malloc(sizeof(SerialImpl)); if (pDevice) { pDevice->base.Open = serial_open; pDevice->base.Close = serial_close; pDevice->base.Write = serial_write; pDevice->base.Read = serial_read; pDevice->handle = -1; pDevice->baudrate = 0; pDevice->sDevice[0] = '\0'; } return (Serial*)pDevice;}void DestroySerialDevice(Serial *pDevice){ if (pDevice) { pDevice->Close(pDevice); free(pDevice); }}
//测试文件
#include #include #include #include #include "serial.h"int main(int argc, char *argv[]){ char sbuf[128]; int count; int size; int ret; Serial *port = CreateSerialDevice(); assert(port != NULL); ret = port->Open(port, "/dev/ttyS3", 921600); assert(ret == 0); while (1) { snprintf(sbuf, sizeof(sbuf), "%d", count++); size = port->Write(port, sbuf, strlen(sbuf)); assert(size != -1); usleep(1000*1000); } port->Close(port); DestroySerialDevice(port); return 0;}
//工程文件
cmake_minimum_required(VERSION 3.0)project(serial)set(CMAKE_BUILD_TYPE "Debug")add_library(serial SHARED serial.c)add_executable(echo echo.c)target_link_libraries(echo serial)
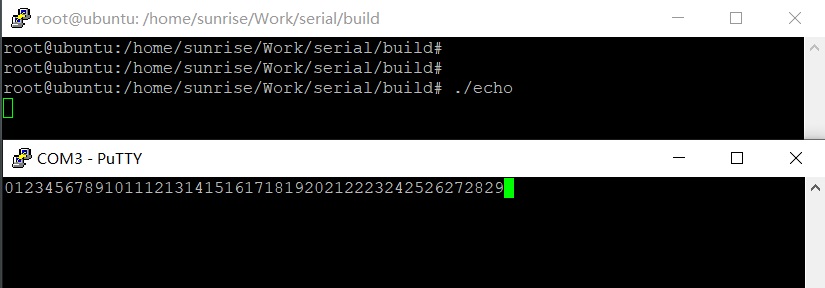
测试结果:
X3派侧echo每隔1s发送一次递增数据,PC侧putty接收并打印。
文中所有文件,均已打包在附件中。欢迎大家一起来玩转串口通信吧
「地平线旭日X3派,开启你的嵌入式开发之旅」,欢迎正在阅读的你申请试用,一起交流开发心得
本文转自地平线开发者社区
原作者:大道至简
原链接:https://developer.horizon.ai/forumDetail/98129540173361338
-
嵌入式
+关注
关注
5210文章
20680浏览量
337398 -
AI
+关注
关注
91文章
41326浏览量
302707 -
人工智能
+关注
关注
1821文章
50367浏览量
267060
发布评论请先 登录
iCAR首发搭载地平线舱驾融合整车智能解决方案

博泰车联网与地平线达成战略合作

地平线11篇论文强势入选CVPR 2026

地平线正式开源HoloBrain VLA基座模型




评论