 AT32讲堂009 | 基于CmBacktrace库,如何快速追踪和定位产生HardFault的原因
AT32讲堂009 | 基于CmBacktrace库,如何快速追踪和定位产生HardFault的原因

概述
在使用ARM Cortex-M系列MCU时(如AT32 MCU),有时会出现程序运行异常。当通过编译器在debug模式查原因时,会发现程序跑到HardFault_Handler函数中,产生HardFault,即硬件错误。
图1. HardFault_Handler函数
本文档主要介绍一种基于CmBacktrace库,快速追踪和定位产生HardFault原因的方法。
HardFault产生原因
常见产生HardFault产生的原因大概有如下几类:
数组越界操作;
内存溢出,访问越界;
堆栈溢出,程序跑飞;
中断处理错误。
数组越界
程序中使用了静态数组,而在动态传参时数组赋值溢出。或者动态分配内存太小,导致程序异常。
内存溢出
重点检查RAM区域,程序编译后执行的RAM数据量大小为多少是否可能越界。一般不要设置到极致的情况,程序中的一些动态数组传参时会导致异常。
堆栈溢出
这在使用操作系统的代码中尤其容易发生,在操作系统中,任务的变量均分配放置在任务所申请的堆栈空间中。
例如FreeRTOS中调用xTaskCreate来创建任务,该函数以参数usStackDepth指定任务堆栈的大小,如果指定的堆栈太小,则会堆栈申请不足,进入HardFault。
中断处理异常
程序中开启了某些中断,例如USART,TIMER,RTC等。
但在程序执行中,满足中断条件,但并未能查找到该部分对应的中断服务函数,则可能会出现该异常。
HardFault分析方法
常见的分析方法是:发生异常之后可首先查看LR寄存器中的值,确定当前使用堆栈为MSP或PSP,然后找到相应堆栈的指针,并在内存中查看相应堆栈里的内容。由于异常发生时,内核将R0~R3、R12 Returnaddress、PSR、LR寄存器依次入栈,其中Return address即为发生异常前PC将要执行的下一条指令地址。
但以上方法要求对ARM内核比较熟悉,且操作较为繁琐。
以下重点介绍采用开源库CmBacktrace作为快速分析的方法。
基于CmBacktrace库分析方法
CmBacktrace(Cortex Microcontroller Backtrace)是一款针对ARM Cortex-M系列MCU的错误代码自动追踪、定位,错误原因自动分析的开源库。主要特性如下:
支持的错误包括:
1) 断言(Assert)
2) 故障(Hard Fault, Memory Management Fault, Bus Fault, Usage Fault, Debug Fault)
故障原因自动诊断:可在故障发生时,自动分析出故障的原因,定位发生故障的代码位置,而无需再手动分析繁杂的故障寄存器;
适配Cortex-M0/M3/M4/M7 MCU;
支持IAR、KEIL、GCC编译器;
支持FreeRTOS、UCOSII、UCOSIII、RT-Thread等OS;
基于MDK的CmBacktrace库使用流程
基于MDK的移植方法按如下步骤进行:
步骤一 添加cm_backtrace库文件到MDK中
图2. cm_backtrace库文件夹
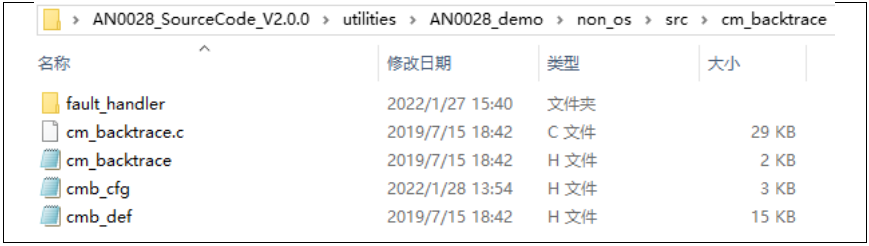
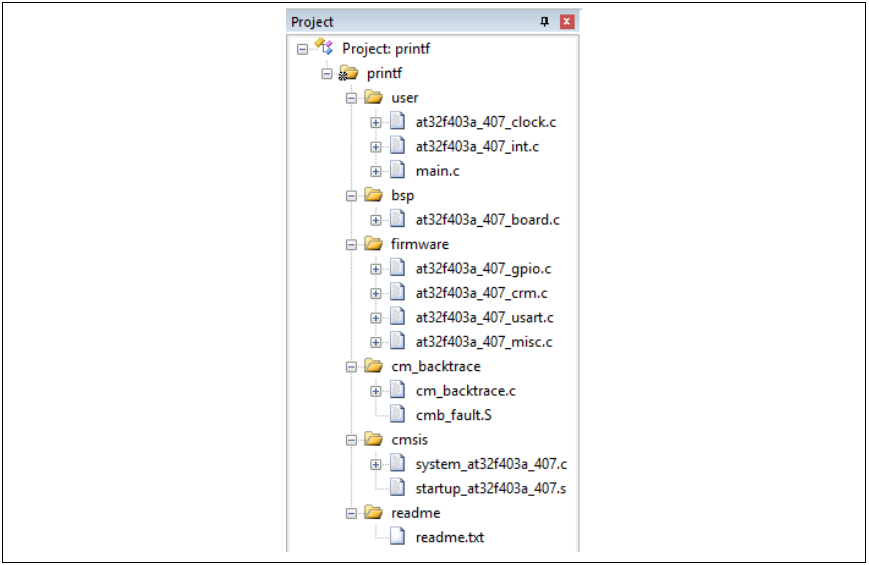
把cm_backtrace文件夹复制到我们的工程目录下,并添加至keil工程中。
图3. 添加cm_backtrace后keil工程目录
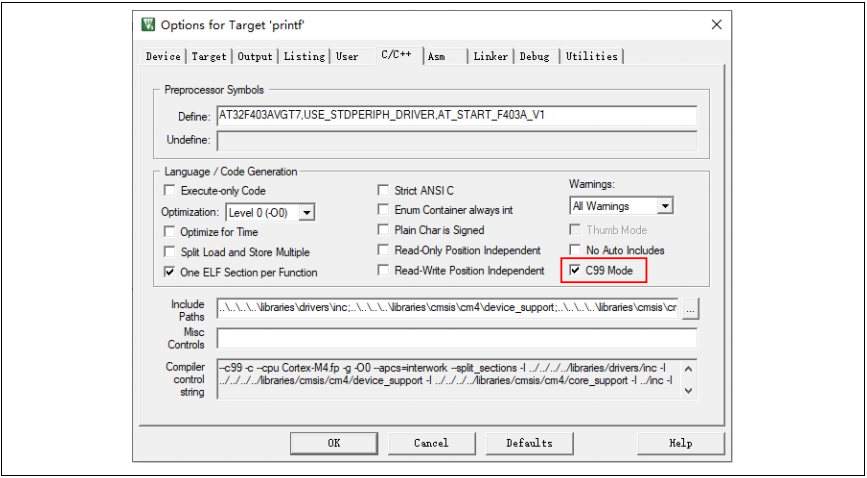
步骤二 添加头文件、勾选C99模式
图4. Keil中配置C99和头文件
步骤三 编译和调试
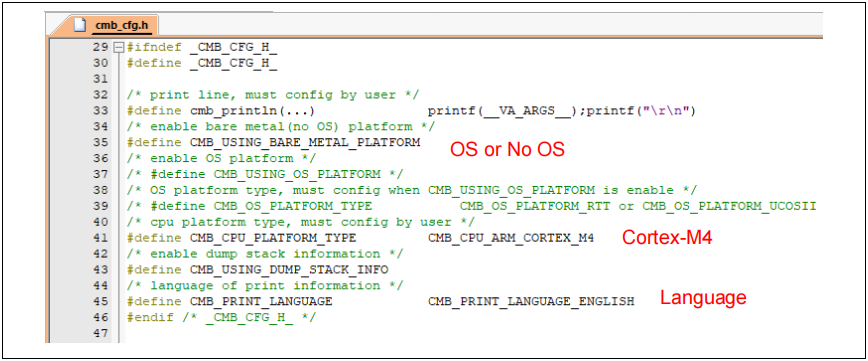
首先,cmb_cfg.h文件按以下提示配置修改。
图5. cmb_cfg.h文件配置
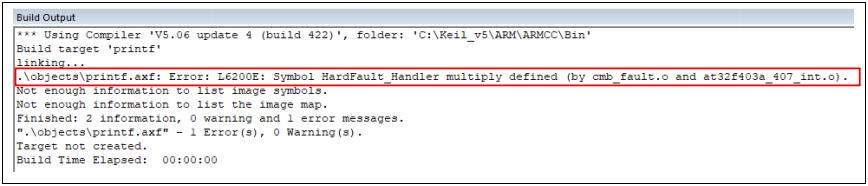
这时候编译有一个错误,这是因为cmb_fault.c与at32f4xx_int.c中的HardFault_Handler函数重复定义:
图6. at32f4xx_it.c编译报错
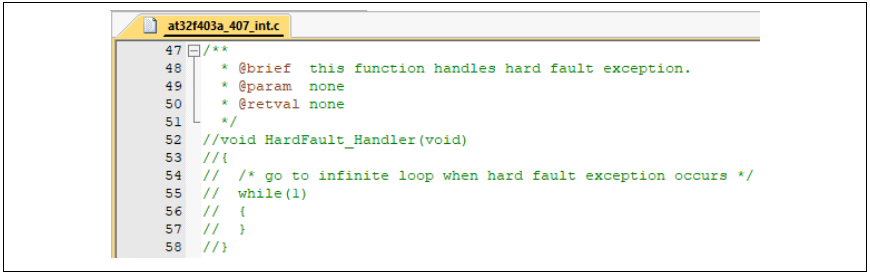
需要把at32f4xx_int.c中的HardFault_Handler函数屏蔽掉。
图7. HardFault_Handler函数屏蔽
步骤四 测试与查看
这时候就可以编译通过了。下面测试这个库的功能。
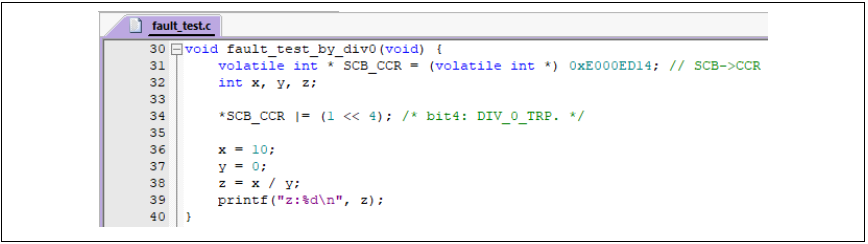
测试函数如下:
图8. 编写除零错误函数
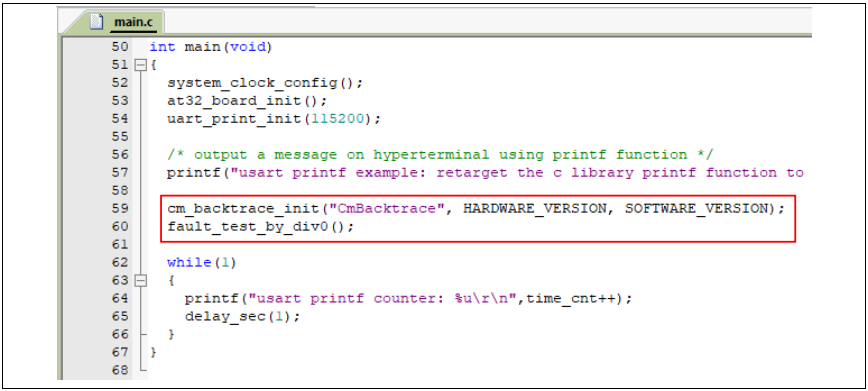
然后在主函数中调用cm_backtrace_init();来初始化cm_backtrace,并调用该测试函数:
图9. main函数调用除零错误函数
下载运行程序,PC端接收串口信息:
图10. 串口助手输出错误信息
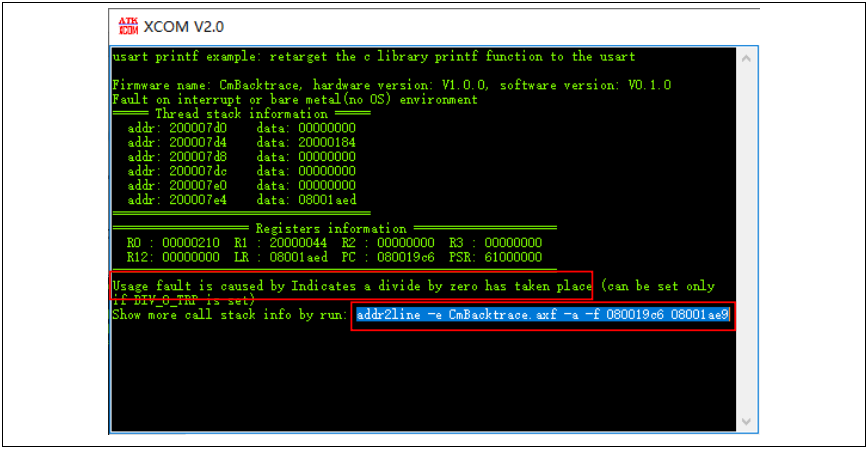
可以看到,列出了出错原因(除0)和一条命令。运行这个命令需要用到addr2line.exe工具,该工具在tools文件夹中:
图11. 定位addr2line.exe位置

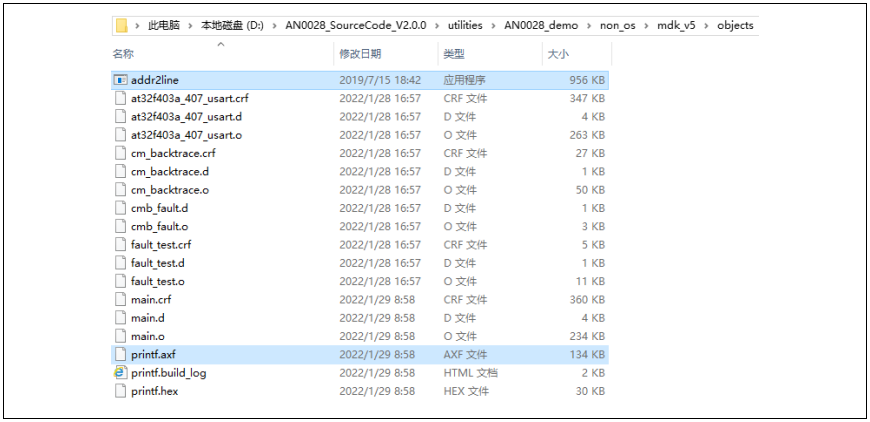
有32bit和64bit两个版本,根据环境选择,并拷贝到keil工程目录下的.axf文件所在的文件夹中,如demo中所附工程,则拷贝到如下目录:
AN0028_SourceCode_V2.0.0\utilities\AN0028_demo\non_os\mdk_v5\objects
图12. 拷贝addr2line.exe工具
进入到cmd窗口,转到上述文件夹位置,运行串口助手中的那条命令:
addr2line -e CmBacktrace(此处要依据用户的工程名修改).axf -a -f 080019c6 08001ae9
如demo中工程名为printf,命令则应修改为addr2line -e printf.axf -a -f 080019c6 08001ae9
图13. 调用CMD运行addr2line.exe工具
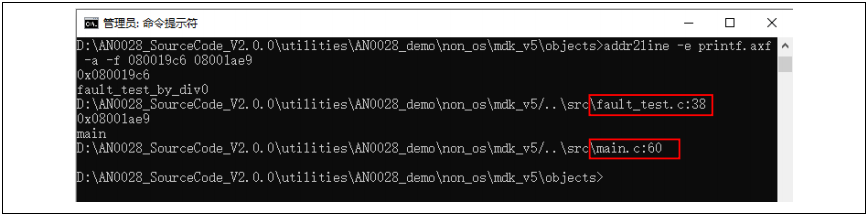
可以看到addr2line.exe工具定位出了错误相关的代码行号,查看对应行的代码:
图14. 确认错误代码区域
可以看到addr2line.exe工具定位出了错误相关的代码行号,main.c的第60行,fault_test.c的第38行,查看对应行的代码:
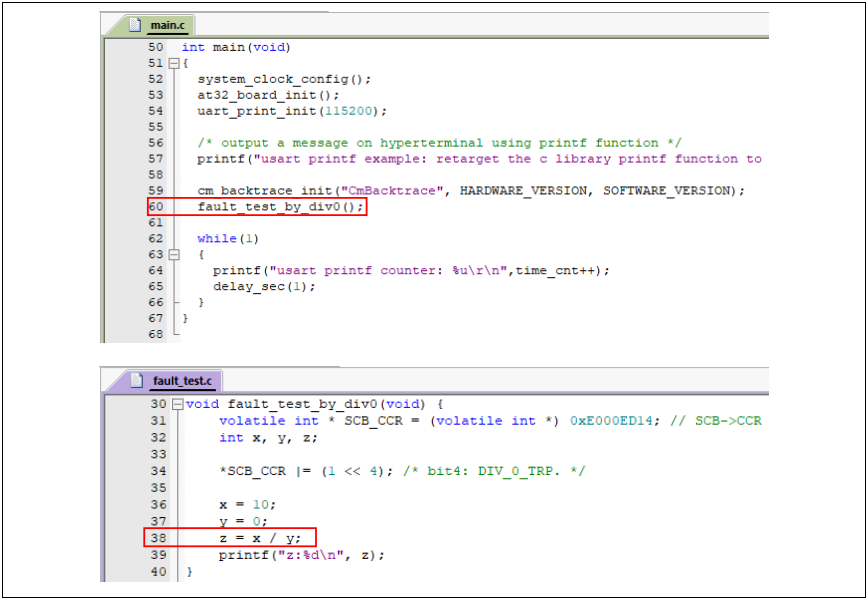
可见,对应的行号正是出错的地方,使用这个CmBacktrace库能帮助用户有效、快速地定位到HardFault之类的错误。
案例展示
案例一 无OS除零错误
工程位置:AN0028_SourceCode_V2.0.0\utilities\AN0028_demo\non_os
测试内容:在裸机上除零错误
案例二 FreeRTOS上除零错误
工程位置:AN0028_SourceCode_V2.0.0\utilities\AN0028_demo\os\freertos
测试内容:在FreeROTOS上除零错误,需注意tasks.c中有注释/**/的三处为针对CmBacktrace做出的修改
案例三 USOCⅢ上非对齐访问错误
工程位置:AN0028_SourceCode_V2.0.0\utilities\AN0028_demo\os\ucosiii
测试内容:在UCOSⅢ上非对齐访问错误,需注意os_cfg.h中#define OS_CFG_DBG_EN为1u
关于雅特力雅特力科技于2016年成立,是一家致力于推动全球市场32位微控制器(MCU)创新趋势的芯片设计公司,专注于ARM Cortex-M4/M0+的32位微控制器研发与创新,全系列采用55nm先进工艺及ARM Cortex-M4高效能或M0+低功耗内核,缔造M4业界最高主频288MHz运算效能,并支持工业级别芯片工作温度范围(-40°~105°)。雅特力目前已累积相当多元的终端产品成功案例:如微型打印机、扫地机、光流无人机、热成像仪、激光雷达、工业缝纫机、伺服驱控、电竞周边市场、断路器、ADAS、T-BOX、数字电源、电动工具等终端设备应用,广泛地覆盖5G、物联网、消费、商务及工控等领域。
-
mcu
+关注
关注
147文章
19258浏览量
405243
发布评论请先 登录
AR1106 声源定位模组|精准声源追踪・极简集成方案・智能交互核心部件

PCBA加工中产生不良的原因有哪些?
pcba板短路怎么快速检出原因
色差是什么?它产生的原因是什么?
SL3160HB GPS 定位器专用芯片:150V 宽压 + 1.8A 输出,车载 / 户外定位稳定供电核心
蓝牙定位追踪技术:从技术原理、核心优势详解(一)
雅特力AT32 MCU推动低空经济发展

MCU调试典型问题与解决方法
LuatOS下GNSS定位开发实战:初识定位、NMEA解码与位置追踪上报
Cortex-M0+处理器的HardFault错误介绍
使用RT-Thread Studio在程序进Hardfault时怎么方便的查看调用栈?
简化定位,从exgnss扩展库开始:GNSS开发从此“轻装上阵”



评论