 综述:基于柔性致动器的跳跃运动
综述:基于柔性致动器的跳跃运动

在自然界中,袋鼠、青蛙和跳蚤等生物通常借助瞬间跳跃来捕捉食物或躲避危险。它们主要通过调节自身形状以达到所需的跳跃高度或距离,这为研究人员设计跳跃机器人提供了灵感。与传统的刚性机器人相比,软机器人由于其灵活性、重量轻、可编程、多功能性和适应性等特点,被应用于结构化、非结构化环境中。柔性致动器作为软机器人的主要构造部分,可在外部环境刺激下如光、电场、蒸汽等,产生可逆机械变形,在跳跃运动领域具有巨大的潜力。
近日,南开大学刘遵峰教授等人近期在Advanced Functional Materials期刊上发表题为“Recent Development of Jumping Motions Based on Soft Actuators”的综述文章。文章第一作者为武汉纺织大学青年教师李晶晶博士,通讯作者为南开大学刘遵峰教授和中国药科大学周湘副教授,武汉纺织大学为第一完成单位。该成果得到了国家自然科学基金等项目的支持。
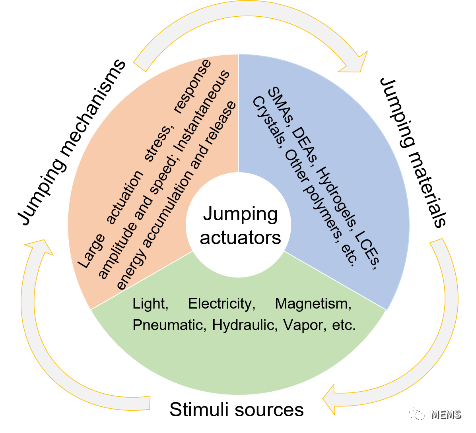
图1 关于跳跃柔性致动器的研究进展重点阐述内容分类
该综述文章系统总结了近年来柔性致动器在跳跃运动领域的研究进展。首先作者讨论了柔性致动器的跳跃机制,重点介绍了两种跳跃驱动机制(大致动力或大变形速度,能量储存-瞬时释放),并对不同柔性材料(形状记忆聚合物、介电弹性体、液晶弹性体、水凝胶及其他高分子聚合复合物)和不同刺激(光、湿气、电场、磁场、液压及气动驱动等)响应跳跃柔性致动器进行了详细分类总结。最后,作者对当前实现柔性致动器的跳跃运动面临的挑战和未来发展前景作了阐述。
审核编辑 :李倩
-
致动器
+关注
关注
0文章
35浏览量
4409 -
软机器人
+关注
关注
0文章
26浏览量
7251
原文标题:综述:基于柔性致动器的跳跃运动
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
高压放大器ATA-7030在电致变形柔性致动器表情机器人控制实验中的应用
压电陶瓷致动器在直线运动应用中的解决方案

压电致动器的应用
制动器和致动器的关系
线性致动器的原理
ATA-7030高压放大器在电致变形柔性致动器表情机器人实验中的应用




评论