 突破移动机器人技术瓶颈,解决动态地图实时更新难题
突破移动机器人技术瓶颈,解决动态地图实时更新难题

重中之重 为什么动态定位建图技术这么关键?
工信部发布的《“十四五”机器人产业发展规划》,提到重点研制AGV、无人叉车、分拣、包装等移动机器人,提高移动机器人的智能化水平,促进巡逻检查、定位导航、消防救援等公共服务机器人的创新应用。
对于移动机器人来说,重中之重的智能化评判标准为定位导航——SLAM (simultaneous localization and mapping),即时定位与地图构建,或并发建图与定位。
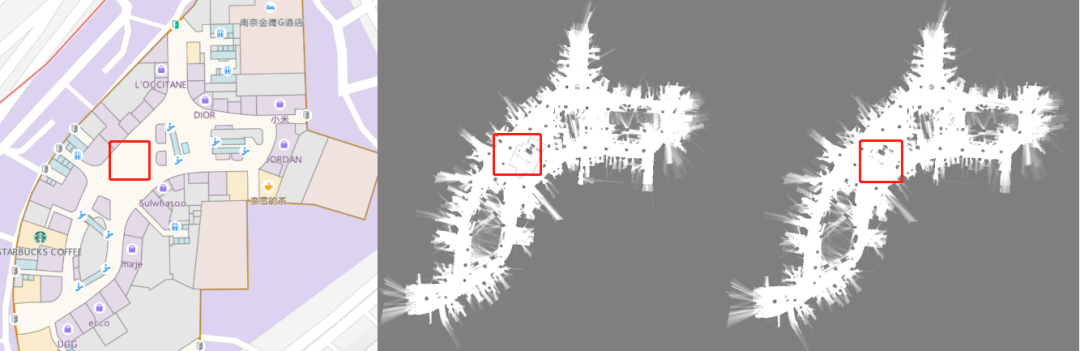
现有的导航定位算法是基于预先建好的地图进行定位,然而移动机器人的工作环境不是一成不变的,例如商场环境,随着时间的推移,店铺以及柜台都会发生变化,并且会增加一些活动场景,都会大幅度改变现有的移动机器人工作环境,从而使得移动机器人无法正常稳定执行工作。


激流勇进 集萃智造突破移动机器人动态建图关键技术
正是为了应对动态环境没有成熟、稳定的解决方案这一现状,集萃智造整合传统SLAM技术与领先算法,提出了全新的动态建图技术方案,能完成动态环境下的定位建图能力,并完整地考虑、覆盖了机器人导航应用需求及功能。
尤其在商业环境下,针对其动态环境的高频变化,新技术能够动态地对环境特征进行分析与特征提取,构建完善的动态实时分析机制,并较好提高识别准确率,完成任务的同时,可以更高效动态更新环境地图。

能够自主导航,高精度定位的集萃智造清洁机器人
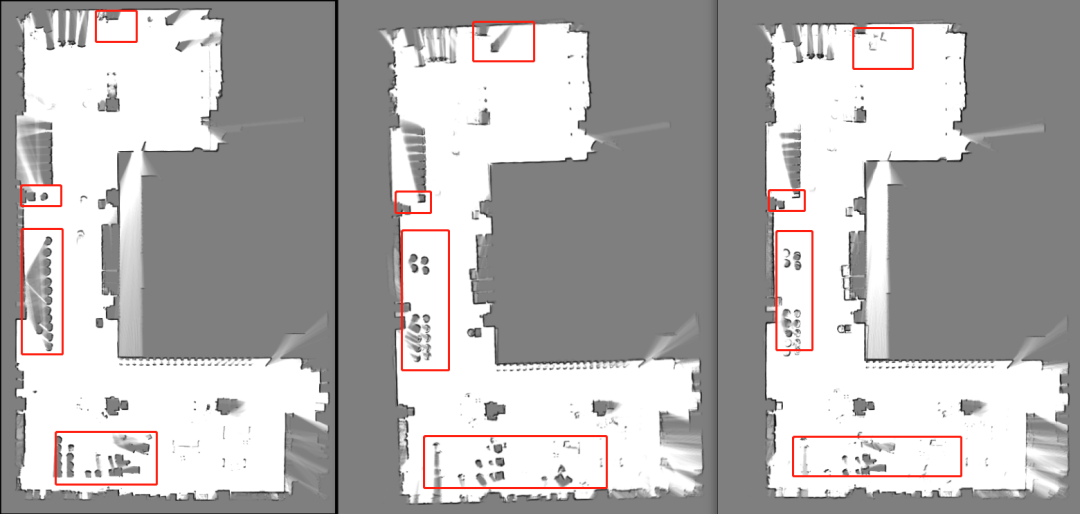
集萃智造动态建图实时更新
该技术主要是基于机器人原始全局定位地图,通过利用机器人运行时的激光雷达感知周围环境中的障碍物,得到激光数据,形成实时子地图;然后将实时子地图与原始全局定位地图对应的全局子地图进行匹配,更新当前全局定位地图。

独具一格 集萃智造动态建图关键技术的领先性
►领先的环境感知系统——多传感器数据融合算法
集萃智造自主研发的移动机器人系列也是基于惯导传感器(IMU),激编码器(encoder),光雷达,视觉里程计等多种传感器融合算法核心技术,能够实现高精准定位,确保运行安全性。
导航采用全局路径规划与局部路径规划并行操作,实现安全可靠的运行。激光、视觉、超声、防碰撞、防跌落、红外等多传感器数据的融合能力,能够实现对动态环境的精准感知,在精确性、场景分析、避障、建图面积以及成本方面提供完美方案。



►高精度动态建图,构建细节精密化
基于强大的环境感知和建图能力,集萃智造移动机器人可在大多数场景地点进行开机识别、全局定位,达到高精度的定位建图。
► 高效建图能力再进化,多种复杂场景通用
集萃智造移动机器人采用了多传感器融合技术,能够适应不同的环境,实现精准定位的同时,也可以选配搭载机器人电梯物联模块,能够自动乘梯,实现跨楼层服务作业等,满足了多楼层复杂环境的需求。

永无止境 集萃智造移动机器人多应用领域探索
与传统的SLAM技术相比,集萃智造新技术实时性更高,能够快速响应环境变化,并及时更新地图。此外,该技术还采用了高效的算法,大大提高了地图的精度和稳定性。
该技术的应用范围广泛,可用于室内巡逻、清洁消毒、家庭服务、机器人配送、陪伴/看护等领域,为机器人的智能化和自主化提供了更加可靠和高效的技术支持。


因为这些场景下机器人自主移动通常会存在环境复杂、粒度细、无法使用GPS等困难,而集萃智造动态地图实时更新的关键技术可以有效地解决这些问题。
审核编辑 :李倩
-
移动机器人
+关注
关注
2文章
820浏览量
34934 -
SLAM
+关注
关注
24文章
459浏览量
33419
原文标题:集萃智造 | 突破移动机器人技术瓶颈,解决动态地图实时更新难题
文章出处:【微信号:im_robotic,微信公众号:机器人在线订阅号】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
探索 NXP MR - CANHUBK344 评估板:为移动机器人应用赋能
MR-VMU-RT1176快速上手:开启移动机器人车辆管理单元设计之旅
MR-BMS771参考设计:适用于移动机器人的电池管理系统
Infineon移动机器人电机控制方案深度解析
Infineon DEMO_IMR_BMSPWR_V1:移动机器人电池管理系统的卓越之选
Infineon DEMO_IMR_BMSCTRL_V1:助力移动机器人电池管理的创新方案
中科创达旗下晓悟智能斩获十年荣耀移动机器人工程应用典范奖
移动机器人“芯”引擎爆发,禾赛、海思新品逆袭

安森美产品如何助力打造下一代自主移动机器人
移动机器人技术的发展历程
恩智浦自主移动机器人设计要点

瑞芯微 RK3568/3588:为移动机器人注入智慧动力引擎
轮式移动机器人电机驱动系统的研究与开发
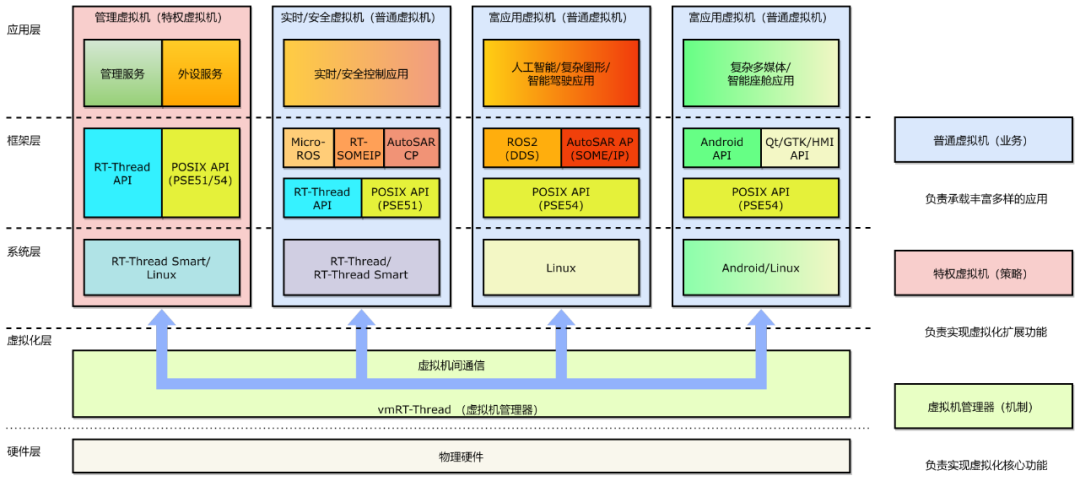
通过vmRT-Thread和ROS2赋能机器人智能开发



评论