 对齐X型气动焊钳上的扁平电极臂及更换极臂.
对齐X型气动焊钳上的扁平电极臂及更换极臂.

对齐 X 型焊钳上的扁平电极臂
在对齐固定式电极臂后必须注意要重新计算 TCP 点。
在对齐前要注意焊钳随附资料中的报告和图纸。
第 1 步:切断机器人焊钳电流,释放压力并排出气动元件的气体。
第 2 步:关闭冷却水循环。
第 3 步:将带焊钳的机器人移至一个安全的维护位置。或者分离机器人焊钳与机器人,并将机器人焊钳定位至适合进行维护工作的基架上。
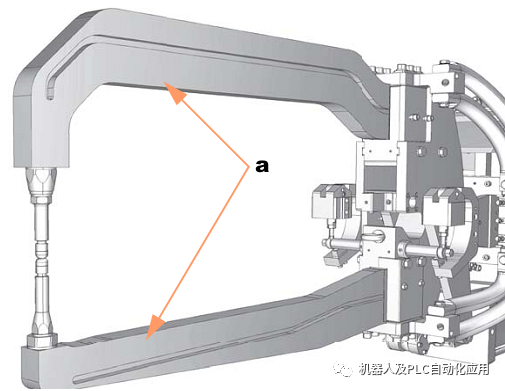
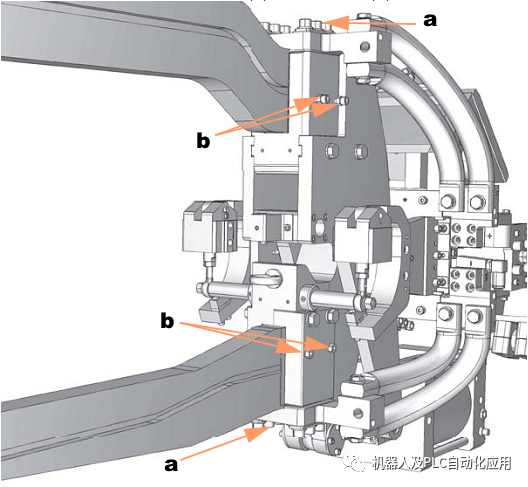
第 4 步:在带扁平电极臂的 X 型焊钳上可对齐两根电极臂 (a)。
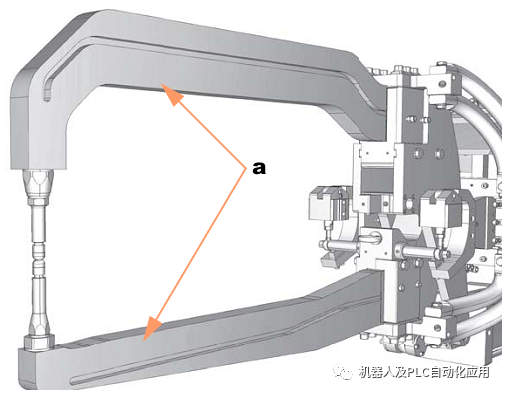
在对齐固定式电极臂时必须重新计算 TCP 点。移动式电极臂可在固定式电极臂上对齐。
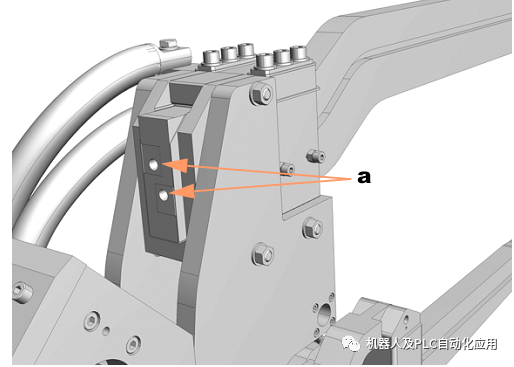
第 5 步:松开需对齐电极臂上的夹紧螺栓 (a或 b) 。
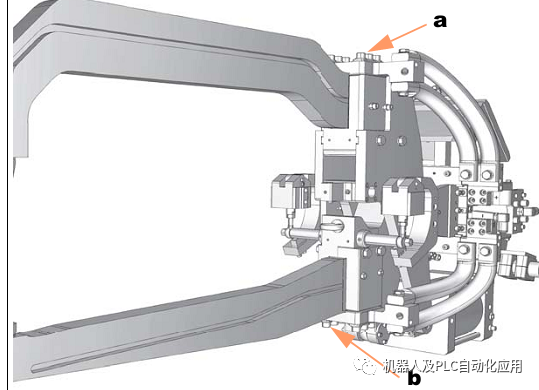
第 6 步:然后即可纵向移动松开的电极臂。进行侧面对齐时请使用侧面调节螺栓 (a 或 b)。
在使用调节螺栓时要注意在对齐后重新装上电极臂上的所有调节螺栓。
第 7 步:在夹紧电极臂前要检查所有绝缘件,确保没有损坏。
必要时更换绝缘件!
第 8 步:计算 TCP 点。为此要注意焊钳随附资料中的报告和图纸。
第 9 步:拧紧需对齐电极臂上的夹紧螺栓 (a或 b) 。
完成对齐。
更换 X 型焊钳上的扁平电极臂
如果两根电极臂都必须更换,我们建议您首先更换与旧电极臂对齐的电极臂,然后再更换第二根电极臂。
第 1 步:切断机器人焊钳电流,释放压力并排出气动元件的气体。
第 2 步:关闭冷却水循环。
第 3 步:将带焊钳的机器人移至一个安全的维护位置。或者分离机器人焊钳与机器人,并将机器人焊钳定位至适合进行维护工作的基架上。
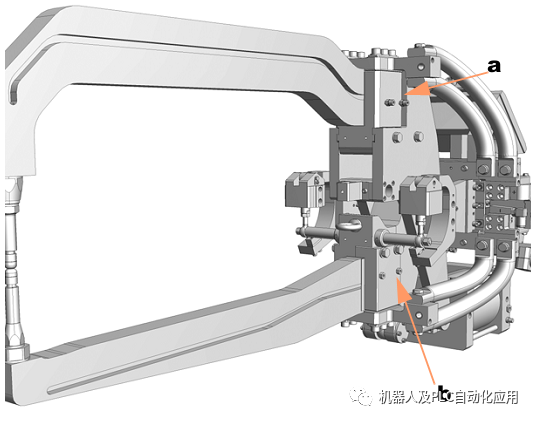
第 4 步:在带扁平电极臂的 X 型焊钳上可更换两根电极臂 (a)。
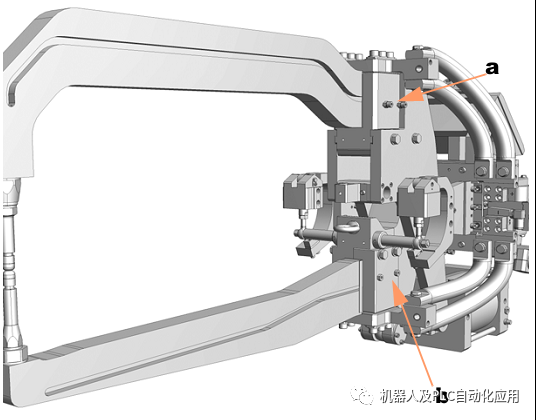
第 5 步:取下电极臂上的冷却水连接 (a)。
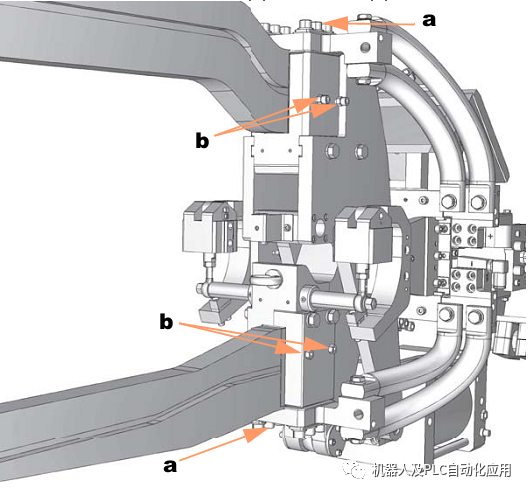
第 6 步:松开需更换电极臂的夹紧螺栓 (a) 和调节螺栓 (b)。
第 7 步:拉出电极臂并装入新电极臂。
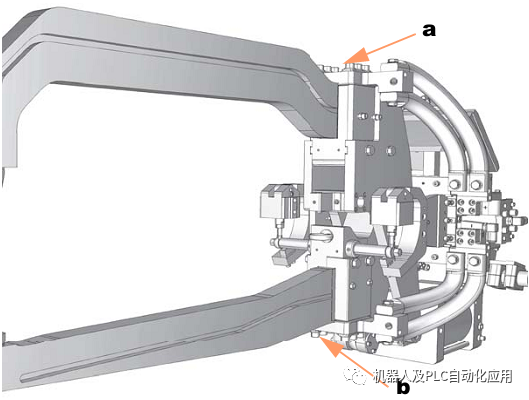
第 8 步:然后即可纵向移动更换后的电极臂。进行侧面对齐时请使用侧面调节螺栓 (a 或 b)。
在使用调节螺栓时要注意在对齐后重新装上电极臂上的所有调节螺栓。
第 9 步:在夹紧电极臂前要检查所有绝缘件是否损坏。
第 10 步:拧紧更换后电极臂的夹紧螺栓 (a) 和调节螺栓 (b)。
第 11 步:重新接上冷却水软管。
第 12 步:计算 TCP 点。为此要注意焊钳随附资料中的报告和图纸。
电极臂更换完毕
审核编辑 :李倩
-
机器人
+关注
关注
213文章
31391浏览量
223547 -
电极
+关注
关注
5文章
904浏览量
28453 -
焊钳
+关注
关注
0文章
16浏览量
1518
原文标题:对齐 X 型气动焊钳上的扁平电极臂及更换极臂.
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
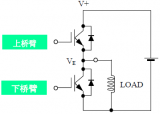
IGBT模块上桥臂驱动电路原理详解
IR2136S 无刷电机驱动板,上桥臂全部输出高电平,求解?
术中透视C型臂是什么,有哪些作用
c形臂x光机的使用规范有哪些
中型C形臂X光机的应用及优势

机器人对齐电极臂前的执行步骤




评论