 功率放大器在驱动介电弹性体机器人的应用
功率放大器在驱动介电弹性体机器人的应用

研究方向:仿生学
实验内容:通过高压施加在机器人驱动部分,观察机器人在一个电压周期内的运动过程
测试目的:利用介电弹性体驱动器制成可以奔跑的仿生软体机器人
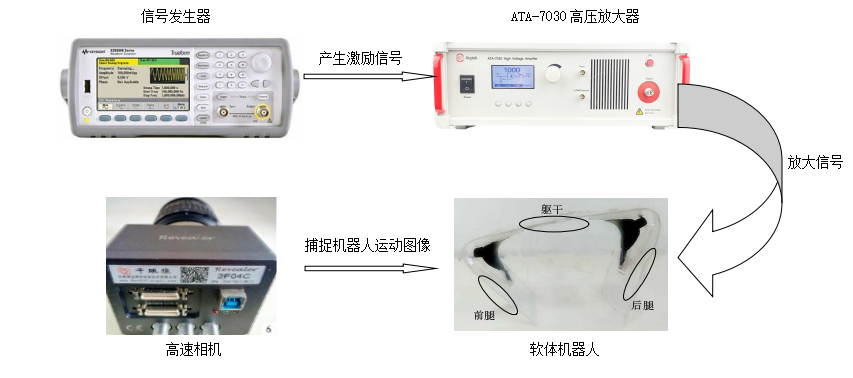
测试设备:信号发生器,功率放大器AigtekATA-7030,介电弹性体机器人,高速运动相机。
实验过程:
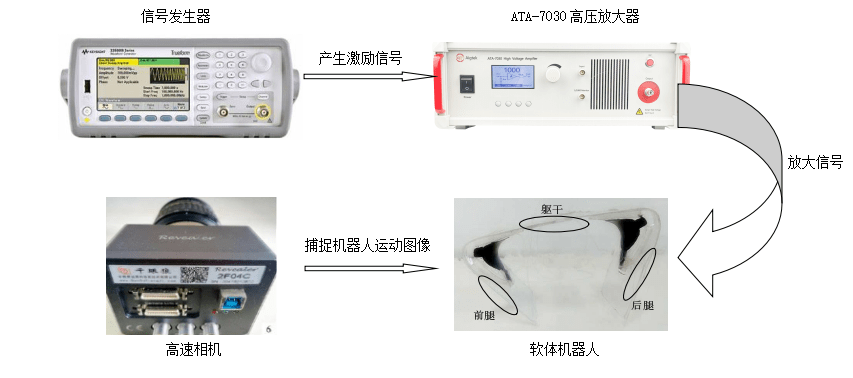
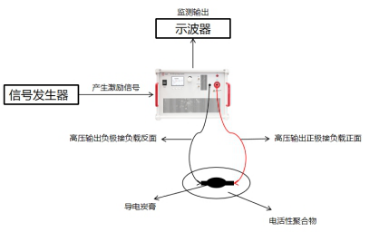
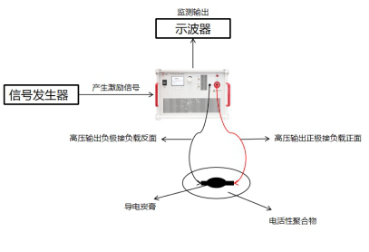
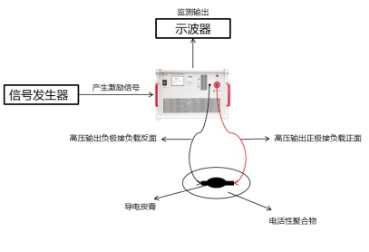
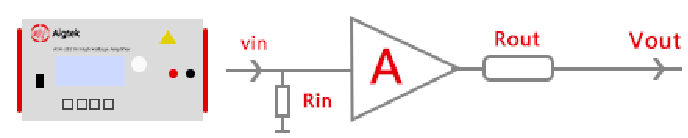
如上图所示为,其中包括一台信号发生器,用以产生频率为3HZ,波形为方波的激励信号;一台高压放大器ATA-7030,接受信号放大为5.5KV的电压,给机器人后退加电,使软体机器人运动,然后用高速相机捕捉机器人运动图像。
实验结果:
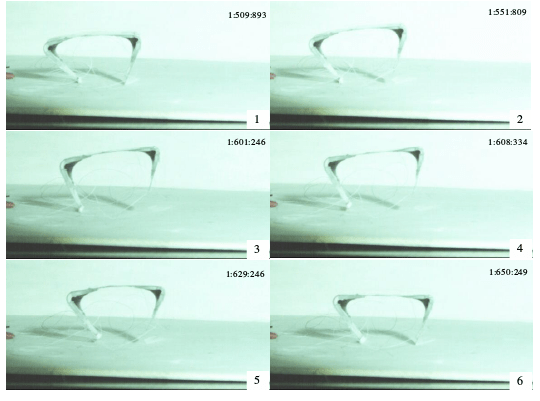
1:机器人初始通电状态,
2:机器人后脚抬起身体上扬,
3:机器人上扬角度达到最高状态,
4:机器人断电起跳,
5:机器人身体腾空,
6:机器人落地。
ATA-7030高压功率放大器参数指标:

审核编辑黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31444浏览量
223662 -
功率放大器
+关注
关注
104文章
4389浏览量
140430 -
信号发生器
+关注
关注
28文章
1727浏览量
113660
发布评论请先 登录
相关推荐
热点推荐
高压放大器如何成为介电弹性体驱动的能量心脏
介电弹性体被誉为有前途的“人工肌肉”材料,其工作原理类似于三明治结构:上下两层柔性电极,中间夹着一层高分子弹性体薄膜。当通过高压放大器对电极

高压放大器在介电弹性体驱动器性能测试中的应用
机制,从带有迟滞和蠕变的临时控制信号中获取近似的实际控制信号。首先,针对介电弹性体驱动器构建了一个带有蠕变的蝶形迟滞特性模型。最后,通过应用初始化技术
高压放大器在介电弹性体软体机器人中的应用
实验名称: 柔性驱动器的性能测试 研究方向: 机器人的发展史已经超过了100年,机器人也逐渐从复杂笨重,功能单一的传统机器人进化为更为智能、微型且高集成的多功能

高压放大器在介电弹性体制成的软机器人研究中的应用
实验名称:介电弹性体肌肉制成的受水蛭启发的软机器人研究 研究方向:水蛭运动的特点是吸盘附着和身体收缩交替,在复杂地形上提供了高度的适应性和稳

介电弹性体软机器人研究:高压放大器的应用实践
实验名称:介电弹性体肌肉制成的受水蛭启发的软机器人研究 研究方向:水蛭运动的特点是吸盘附着和身体收缩交替,在复杂地形上提供了高度的适应性和稳

看视频答题抽好礼 | 功率放大器应用知多少?线上有奖问答等你来战!
,今天就请跟随我们的视频走进功率放大器的经典应用,一起看视频,涨知识吧!介电弹性体:柔性驱动的新引擎介
驱动未来 | 一文速览功率放大器基础知识及经典应用!
正文有点长,可以收藏慢慢看INTRODUCE关于功率放大器功率放大器的概念&组成概念:在给定失真率条件下,能产生最大功率输出以驱动一些阻性、容性、感性负载(如压电陶瓷、换能器、电磁线圈
高压功率放大器使用技巧介绍
在现代电子系统中, 高压功率放大器 扮演着至关重要的角色,用于放大和控制高压电信号,例如用于医疗成像设备、工业机器人、通信系统和能源转换器等领域。以下是一些使用高压



评论