 电机和电机驱动基础 -总结-
电机和电机驱动基础 -总结-

历经大约两年半的时间,共发布47篇文章的Tech Web Motor基础知识“电机驱动基础篇”将在本文告一段落。作为整体的总结,本文汇总了每篇文章的链接及其关键要点,供大家参考。
电机和电机驱动概述
电机驱动器所要求的四大要点
关键要点
全世界对电机的需求呈现强劲增长趋势。
高效率的电机驱动和控制方法对于解决世界能源问题来说非常重要。
电机驱动器要求的四大要点:“高可靠性”、“低功耗、高效率”、“静音、低振动”、“控制、便利性”
电机的种类与分类
关键要点
关于电机的种类,分类方法有很多种。
从使用电机的角度看,可根据能量转换介质、电源、结构、特性等进行分类。
小型电机的结构
关键要点
电机的基本组成部件主要为线圈、永久磁铁和转子。
根据电机种类,又分为线圈固定型和磁铁固定型电机。
各领域的电机驱动系统概述
关键要点
电机驱动系统因领域和应用产品而异。
应用产品和要求内容不同,所适合的电机和驱动/控制方法也各不相同。
电机的旋转原理和发电原理
电机的旋转原理
关键要点
电机的旋转原理遵循电流、磁场和力相关的定律(法则)。
电机的发电原理
关键要点
电机的发电作用与旋转动作一样,遵循电流、磁场和力的定律(法则)。
有刷DC电机
有刷电机的结构
关键要点
顾名思义,有刷电机中存在被称为“电刷”的电极。
电机由定子和转子组成,定子包括磁体,转子包括线圈和换向器。
旋转原理
关键要点
有刷电机是线圈由于电刷和换向器的连接状态、电流和磁场的产生、以及固定磁体和线圈外侧的极性关系而沿相同方向持续运动,从而使转子旋转的。
发电原理
关键要点
通过线圈在磁场中旋转来发电,并在电机引脚中产生直流电压。
短路制动
关键要点
通过使电机引脚短路,可以产生相反方向的旋转力,并且可以获得使旋转停止的制动效果。
有刷直流电机的特性
关键要点
当施加转矩时,转速会以恒定值下降。
当提高电源电压时,转速会上升。
当施加转矩时,电机电流会以恒定值增加。
最大转矩时=转速为零时=电机电流最大。
使用H桥电路驱动有刷直流电机:原理
关键要点
H桥电路是用来改变电机连接状态的电路。
使用4个开关(晶体管)进行4种连接状态的切换。
有刷直流电机的实际驱动电路由H桥电路和电压控制电路组合构成。
通过H桥电路驱动有刷直流电机:输出状态的切换
关键要点
可以通过2位逻辑来实现H桥四种连接状态的切换。
除H桥和控制逻辑电路外,许多实际的有刷直流电机驱动IC还具有电平转换和同时导通防止功能。
通过H桥电路驱动有刷直流电机:高边电压线性控制
关键要点
可以线性控制H桥电路高边电压的电路结构。
通过控制输出引脚的H电压,可以线性控制电机转速和转矩。
使用BTL放大器电路驱动有刷直流电机:线性电压驱动
关键要点
将BTL放大器应用于电机驱动的有刷直流电机线性电压驱动示例。
使用了BTL放大器的有刷直流电机驱动分为电压驱动和电流驱动两种。
使用BTL放大器电路驱动有刷直流电机:线性电流驱动
关键要点
将BTL放大器应用于电机驱动的有刷直流电机线性电流驱动示例。
使用了BTL放大器的有刷直流电机驱动分为电压驱动和电流驱动两种。
使用PWM输出方式驱动有刷直流电机:PWM驱动的原理
关键要点
有刷直流电机的PWM驱动会反复施加电压和电流再生动作。
有多种使用H桥进行电流再生的方法。
使用PWM输出方式驱动有刷直流电机:PWM驱动时的电流再生方法
关键要点
有刷直流电机的PWM驱动会反复施加电压和电流再生动作。
使用H桥的电流再生方法有多种,再生电流路径不同损耗也不同。
使用PWM输出方式驱动有刷直流电机:损耗和注意事项
关键要点
关于有刷直流电机的PWM驱动损耗,可以从施加电压时、电流再生时和转换时三个状态来考虑。
如果提高开关速度(转换速率),效率会提高,但噪声会增加。
当提高PWM频率时,可以减少电流纹波,但效率会降低。
使用PWM输出方式驱动有刷直流电机:H桥电路PWM驱动
关键要点
支持PWM驱动的H桥有刷直流电机驱动器IC有几种类型。
可以直接将PWM信号输入至IN1/IN2的类型。
配有由Vref引脚、三角波发生器及比较器组成的PWM信号生成电路的类型。
使用PWM输出方式驱动有刷直流电机:H桥恒流驱动
关键要点
H桥PWM恒流驱动的一种方法是使用电流检测电阻检测电机电流,并通过比较器将其与基准电压进行比较的PWM控制方法。
由于电流检测电阻中会产生较大的电流变化,因此可能会产生噪声电压并引发误动作。
有一种通过设置消隐时间来抑制误动作的方法。
使用PWM输出方式驱动有刷直流电机:BTL放大器输入形式驱动
关键要点
使用BTL放大器输入形式的H桥PWM驱动中,利用VIN的电压差来控制占空比。
如果有防止同时导通的电路,当占空比为0%或100%左右时,可能无法保持线性控制。
另外还应注意,第一级放大器、三角波振荡器和比较器均具有偏移量变化,因此占空比相对于输入电压存在偏差。
单开关电路驱动、半桥电路驱动
关键要点
单开关电路驱动通过一个开关控制旋转和空转两种状态。
在单开关电路驱动中将功率晶体管用作开关时,由于晶体管可能会因反电动势而受损,故需要使用钳位二极管。
半桥电路可以控制旋转、空转和制动三种状态。
当使用MOSFET作为开关时,半桥电路可以通过MOSFET的寄生二极管实现制动动作。单开关电路和半桥电路均适用PWM驱动和电流驱动。
有刷直流电机的驱动电路总结
步进电机的结构
关键要点
步进电机是一种可以与脉冲信号同步准确地控制旋转角度和转速的电机,也称为“脉冲电机”。
步进电机的基本结构是线圈固定、永磁体可以旋转的结构。
步进电机的基本工作原理
关键要点
在两相双极步进电机中,按顺序逐相进行线圈励磁会使电机旋转。
按相反的顺序励磁可以使电机反向旋转。
步进电机:微步驱动原理
关键要点
步进电机可以通过微步驱动来实现更精细的步距角控制。
微步驱动的优点是可以进行微小角度的位置控制,并且可以减少低速范围的振动和噪声。
步进电机的基本特性
关键要点
“牵入转矩特性”也称为“启动转矩特性”,表示可以使停止状态的电机启动的频率(脉冲频率)与负载转矩之间的关系。
牵入转矩曲线内的区域称为“自启动区域”,是可以启动、停止和反转的区域。
将负载转矩为零的频率=可以启动电机的极限频率称为“最大自启动频率”。
“失步转矩特性”也称为“连续特性”或“牵出转矩特性”,表示在自启动后增加负载转矩时可以继续旋转的频率,其值高于牵入转矩特性的值。
电机可以连续运行的极限称为“最大连续运行频率”。
牵入转矩特性和失步转矩特性都是负载转矩会随着脉冲频率的增加而降低。
保持转矩是在通电状态下在电机停止时即使施加外力,电机也试图保持停止位置的力。
步进电机的牵入转矩特性和失步转矩特性会因励磁方法和驱动电路而异。
混合式步进电机的结构和工作原理
关键要点
混合式步进电机是兼具VR型和PM型电机优点的步进电机。
混合式步进电机使用VR型结构来实现精细的步距角,并且可以通过与永磁体相结合来增加转矩。
步进电机通过切换两对线圈的通电状态(4步),可以使转子旋转一个齿距。
步进电机的驱动:双极连接和单极连接
关键要点
双极连接
采用电流在一个绕组中双向流动的驱动方式(双极驱动)。
结构简单,但驱动电路复杂。
绕组利用率好,且可以进行精细的控制,因此能够获得很高的输出转矩。
可以减小在线圈中产生的反电动势,因此可以使用耐压低的电机驱动器。
单极连接
具有中心抽头,采用电流在一个绕组中始终沿固定方向流动的驱动方式(单极驱动)。
结构复杂,但驱动电路简单。
绕组利用率差,与双极连接相比,只能获得约一半的输出转矩。
由于会在线圈中产生较高的反电动势,因此需要使用高耐压的电机驱动器。
两相双极步进电机的驱动其1
关键要点
可使用双通道的H桥驱动电路来驱动两相双极步进电机。
两相双极步进电机驱动的电流再生模式包括Slow Decay、Fast Decay及Mix Decay。
两相双极步进电机的驱动其2
关键要点
在两相双极步进电机的驱动中,与Fast Decay相比,Slow Decay的电流纹波更小,因此噪声更小,平均电流更大,故可以获得更大的转矩。但是,在高脉冲频率情况下表现不佳。
在两相双极步进电机的驱动中,与Slow Decay相反,Fast Decay在噪声和转矩方面虽然表现逊色,但在高脉冲频率方面则更具优势。
在两相双极步进电机的驱动中,Mix Decay可以结合Slow Decay和Fast Decay的优点来优化波形。
两相单极步进电机的驱动
关键要点
与两相双极步进电机的驱动电路相比,两相单极步进电机的驱动电路在输入段配置、内部逻辑及控制电路和驱动电路使用双通道方面基本相同,但是输出段的配置不同。
两相双极步进电机使用双通道H桥来驱动,而两相单极步进电机则使用双通道的2个开关(MOSFET)来驱动。
在输出关断的瞬间,会产生瞬态电压,并且由于结构上的原因,变压器耦合会产生(2×VM)以上的电压,因此需要注意驱动器的耐压。
步进电机总结
三相无刷电机
三相全波无刷电机的结构
关键要点
三相无刷电机的线圈被固定在电路板上,并缠绕在铁芯上。
线圈固定,永磁体(转子)旋转。
可使用霍尔元件来检测转子(磁体)的位置。
三相全波无刷电机的旋转原理
关键要点
通过三个线圈的电流流入和流出使磁场发生变化,从而使转子旋转。
三相全波无刷电机的位置检测
关键要点
三相全波无刷电机的位置检测方法有两种:使用霍尔元件的方法和不使用霍尔元件而使用电机线圈的感应电压的方法。
三相全波无刷电机的驱动:有传感器、120度激励线性电流驱动
关键要点
120度激励驱动是各相位差120度、并反复进行“120度导通(H)、60度关断、120度导通(L)、60度关断”的循环来实现驱动的。
三相全波无刷电机的驱动:有传感器、正弦波PWM驱动
关键要点
正弦波激励驱动是各相位差为120度的正弦波驱动。
正弦波驱动由于不会像120度激励驱动那样产生尖峰噪声而在噪声方面更具优势。
通过PWM驱动实现高效率。
三相全波无刷电机的驱动:超前角控制
关键要点
当磁铁磁场的相位比绕组磁场的相位滞后90 度时,可以获得电机的最大转矩。
当相感应电压的相位与相电流的相位相同时,即满足上述条件,从而可获得最大转矩。
然而,如果在与相感应电压相同的相位施加电压,则相电流会出现相位滞后并产生负转矩。
超前控制是一种通过使相施加电压的相位超前以使相电流的相位与相感应电压的相位匹配的方法。
三相全波无刷电机的驱动:如何使施加于电机的电压更大
关键要点
在三相全波无刷电机的正弦波驱动中,如果只是单纯的正弦波驱动,那么施加于电机的电压只有电源电压的0.87倍。
可以使施加于电机的电压更大的手法有两种:
将正弦波下方圆弧的一半分别加到其他两相上方进行驱动。
将三次谐波加到基波(正弦波)上。
三相全波无刷电机的驱动:无传感器120度驱动
关键要点
在无传感器驱动中,有一种使用线圈的感应电压代替霍尔元件来检测电机位置的方法。
该方法利用了三个线圈中点处的信号CT。
通过捕获该CT信号和A1、A2、A3信号并输入驱动电路,并由比较器进行比较,来生成各输出。
这种无传感器驱动方式与有传感器驱动基本相同,不同之处在于该方式使用感应电压。
无传感器120度驱动的启动方法一:通过检测同步运行时的感应电压来启动
关键要点
要启动三相全波无刷电机无传感器120度驱动时,由于停止时的永磁体位置未知而需要采用以下方法:
①通过检测同步运行时的感应电压来启动
②通过检测永磁体停止位置来启动
方法①是无论永磁体的位置如何,都在旋转方向上形成合成磁场,通过在一定时间内进行切换,使永磁体开始旋转,从而产生的感应电压,检测到该感应电压并将其应用到正常控制中。
这种启动方法存在以下问题:
由于生成合成磁场时不考虑永磁体的位置,因此在某些状态下,可能会施加反向转矩,在某些永磁体停止位置,启动时需要时间。
本来,产生足够转矩的永磁体与合成磁场的位置关系是90度,但由于生产合成磁场时不考虑永磁体的位置,所以会从比如70度或60度等角度开始,所以无法获得固定的较大启动转矩。
作为对策,可以采取方法②。
无传感器120度驱动的启动方法二:通过检测永磁体停止位置来启动
关键要点
“通过检测永磁体停止位置来启动的方法”可以避免“通过检测同步运行时的感应电压来启动的方法”所存在的课题——反转和低转矩启动,并改善了启动时间较长的问题。
要检测永磁体的停止位置,需要在电机不旋转的短时间内进行6种模式的通电,并确认最大(或最小)电源电流的模式。
总结:三相全波无刷电机的特征与用途
关键要点
三相全波无刷电机最大的优点是没有电刷,因此电气噪声和机械噪声很小,可靠性高,寿命长。
三相全波无刷电机的缺点是整流功能需要复杂的电子电路和传感器,成本更高。
小型电机的选型方法
小型电机的特点、性能、特性比较
关键要点
可以将小型电机的特点、性能、特性比较结果用作电机选型时的参考。
同一类别的电机中又包括多种规格,因此小型电机的特点、性能、特性比较结果仅用作参考。
最终还是需要通过各电机的技术规格书来确认详细信息。
电机驱动器IC的绝对最大额定值
电机规格与电机驱动器IC绝对最大额定值之间的关系
关键要点
半导体元器件的绝对最大额定值的术语定义,遵循“JIS C 7032 晶体管通则”中的术语定义。
绝对最大额定值的定义是“即使一瞬间也不可超过的极限值,是不允许任何两个项目同时达到的极限值”。
进行电机驱动器IC选型时,基本上要根据电机规格和使用条件来选择满足要求的驱动器IC。
如果超过绝对最大额定值,可能会导致驱动器IC的特性恶化、寿命缩短、甚至会损坏IC。
即使在绝对最大额定值范围内,使用环境条件越严苛,驱动器IC的可靠性越低。
审核编辑黄宇
-
驱动器
+关注
关注
54文章
9012浏览量
153353 -
电机
+关注
关注
143文章
9485浏览量
153175 -
电机驱动
+关注
关注
60文章
1374浏览量
89087
发布评论请先 登录
DRV8821 双路步进电机控制器与驱动器技术文档总结
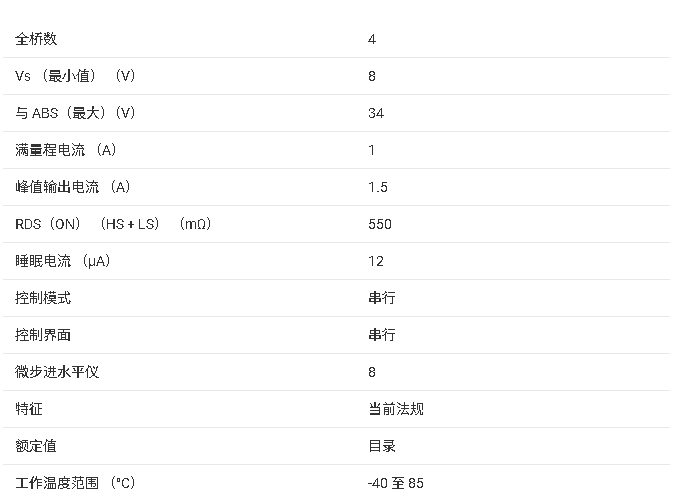
DRV8823 四桥串行接口电机驱动器技术文档总结
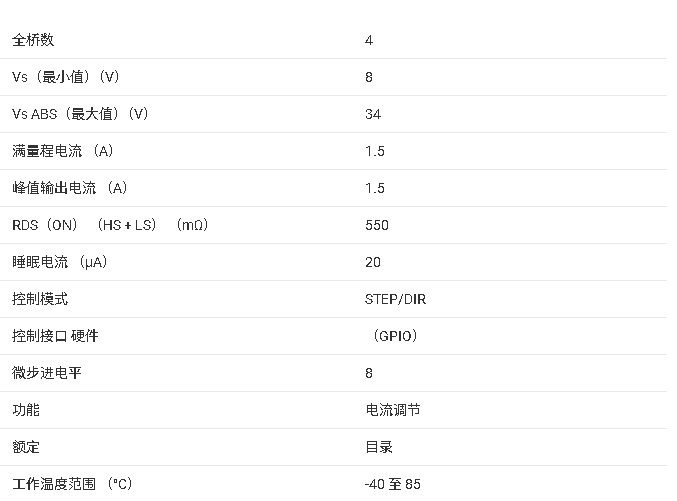
DRV8825 步进电机驱动IC技术文档总结

TPIC2050 电机驱动IC技术文档总结

TPIC2060A 9通道电机驱动器技术文档总结

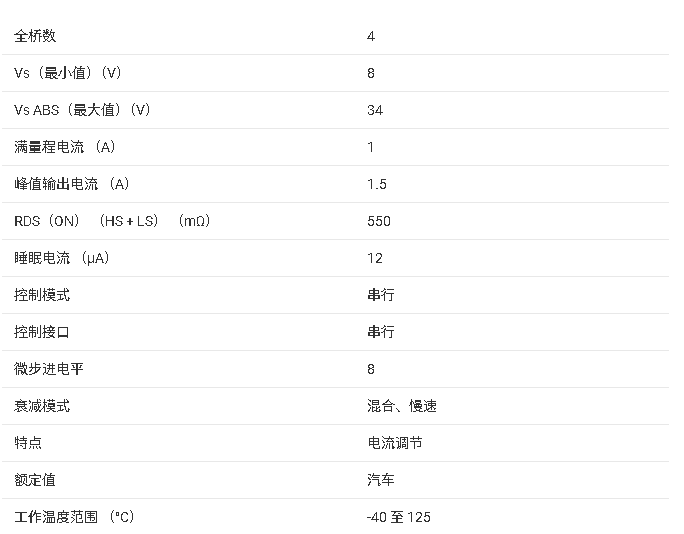
DRV8823-Q1 4桥串行接口电机驱动器技术文档总结
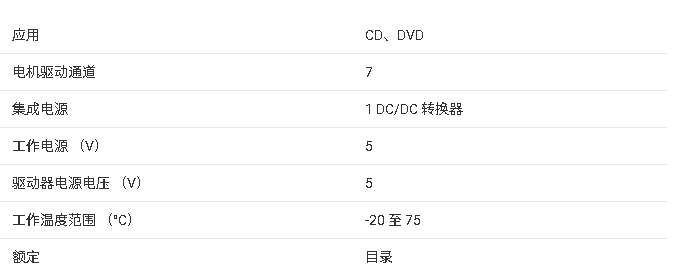
TPIC2040 7通道电机驱动IC技术文档总结
DRV8832-Q1 低电压电机驱动IC技术文档总结
DRV8824-Q1 汽车级步进电机驱动器技术文档总结
DRV8428E/P 双H桥电机驱动器技术文档总结
DRV8845 电机驱动器技术手册总结
DRV8262 电机驱动器技术手册总结
电机驱动和舵机驱动?
单片机怎么驱动电机?
有刷电机与无刷电机的区别工作总结






 工商网监
工商网监
评论