 小米足式机器人专利曝光:前后双弹簧设计
小米足式机器人专利曝光:前后双弹簧设计

近日,北京小米移动软件有限公司“足式机器人的小腿结构和足式机器人”专利获授权。
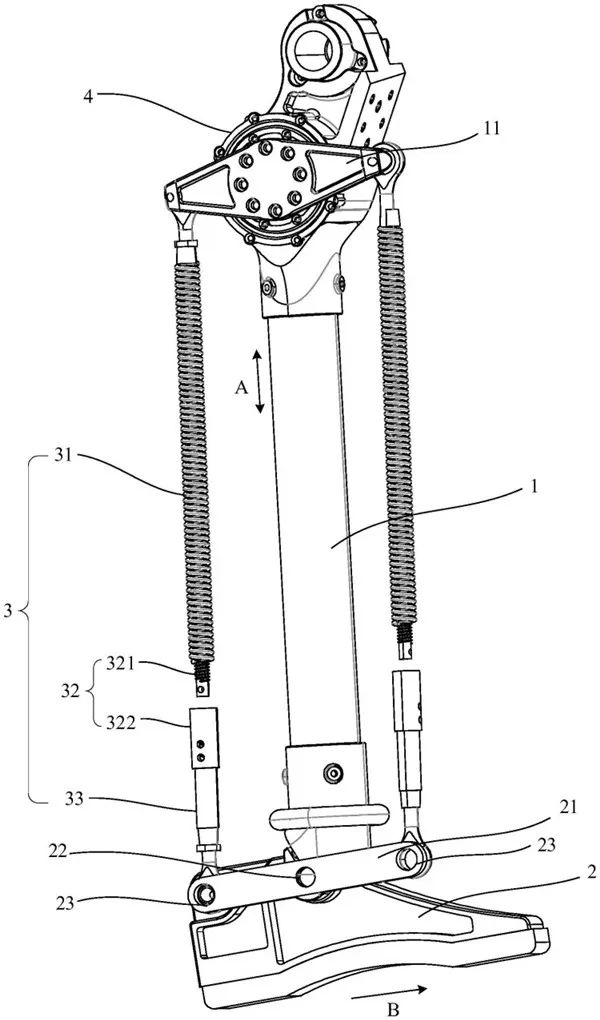
企查查专利摘要显示,该专利属于足式机器人技术领域,该足式机器人的小腿结构包括:腿部杆、足部和弹性连接机构,所述腿部杆的第一端与所述足部的第一位置可枢转地相连,所述弹性连接机构位于所述腿部杆的侧方,所述弹性连接机构与所述腿部杆的第二端相连,且与所述足部的第二位置相连。
通过在腿部杆的侧方设置弹性连接机构,弹性连接机构与腿部杆相连,且与足部相连,在足式机器人运动的过程中,弹性连接机构可以有效地吸收足部处产生的震动,提高机器人运动的稳定性,并减小震动对机器人造成的冲击,避免震动对机器人造成损坏。
去年8月,小米就曾发布了首款人形机器人“铁大(CyberOne)”,身高177厘米,体重52公斤,是一款全尺寸人形仿生机器人。官方表示,铁大背后的智能、机械能力,全部由小米机器人实验室全栈自研完成,相比之前的机械狗,它的研发难度更高。
官方同时表示铁大具有高情商、可感知人类情绪,视觉敏税、可对真实世界三维虛拟重建,“小脑”发达、可实现双足运动姿态平衡,四肢强健、动力峰值扭矩300Nm等领先能力。

审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31432浏览量
223611 -
仿生机器人
+关注
关注
1文章
76浏览量
16218
原文标题:小米足式机器人专利曝光:前后双弹簧设计
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
英泰学堂与行业专家共话四足机器人技术未来
2月2日,英泰学堂举办的《四足机器人技术实现及场景应用》主题培训在7栋一楼多功能厅成功开展。本次培训特邀行业专家白金龙先生主讲,培训内容紧扣机器人技术前沿动态,全面覆盖硬件选型、感知系统搭建、运动控制策略以及场景落地实践等多个关
【行业案例】双足人形机器人开发周期缩短40%!头部集成商如何借力阿普奇“大小脑”方案实现快速突破
2025年10月至2026年1月,某国内头部人形机器人集成商与阿普奇深度合作,基于Thor“大小脑”融合架构与RK3588全能小脑,在短短 4个月 内完成新一代双足人形机器人样机的开发
普渡D5在全球首个机器人登高挑战赛中斩获轮式四足机器人组冠军
近日,全球首个“机器人登高挑战赛”在广州塔450米户外观景平台震撼开赛。这场聚焦高空复杂环境的机器人竞技赛事,汇聚了多家顶尖企业的11款参赛机器人,涵盖双

普渡机器人发布行业级四足机器人PUDU D5系列, 引领多形态具身智能发展
12月3日,全球服务机器人领军企业普渡机器人正式发布新款行业级自主导航四足机器人 PUDU D5 系列,该产品专为复杂、非结构化及大面积户外环境量身打造,通过超高算力自主导航、多模态交
CW32L012小型机器人控制评估板活动 四足机器人+智能小车 开箱评测
一、评测前言
非常感谢CW32生态社区,开源分享了许多比较好玩、优质的项目。这次活动都尾声了还能有幸申请购买到 四足机器人+小车-智能小车(套件数量不多)的评测套件,多谢C32生态社区的大力支持
发表于 11-24 23:44
最新发布!泰科机器人发布首款自研双足人形机器人
泰科机器人凭借十多年的技术积淀与持续创新,已成功推出多款高性能人形机器人四肢的解决方案。今天,泰科机器人再次迎来重大突破——首款自主研发的双足

机器人看点:宇树新专利可提升机器人表演效果 蔚来资本入股具身智能公司原力灵机 美信科技新设机器人制
给大家带来一些机器人相关讯息: 宇树新专利可提升机器人表演效果 据企查查APP信息显示,宇树科技股份有限公司“一种基于数字孪生的机器人运动控制方法和电子设备”
材质识别MEMS超声波传感器赋能双足机器人自适应行走
材质识别MEMS超声波传感器通过声学特性分析,为双足机器人提供了独特的环境感知维度。其在步态适应性、防滑控制及能耗优化方面的作用,已成为复杂环境下稳健行走的关键使能技术。随着MEMS工艺与算法融合的深入,

宽视场角MEMS超声波传感器在双足机器人避障系统中的关键作用
通过持续优化传感器融合架构,双足机器人的环境适应性将进一步提升,为灾难救援、社会服务等场景提供可靠技术支持。
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
机器人看点:越疆机器人正式发布六足仿生机器狗 智元公布机器人运动控制模型专利
给大家带来两个机器人的最新消息: 越疆机器人正式发布六足仿生机器狗 7月9日,深圳越疆机器人正式发布六足
年出货约2万台!中国厂商主导全球四足机器人市场
电子发烧友网报道(文 / 吴子鹏)近日,国际数据公司(IDC)发布《全球四足机器人市场份额,2024:中国厂商领跑,具身智能开启多元行业应用》报告。数据显示,2024 年全球四足机器人
机器人行业最新资讯(一)
人形机器人 多形态双足机器人TRON 1发布,推动具身智能研究,降低科研门槛助力家庭服务等场景应用 逐际动力推出的TRON 1多形态双
一文了解人形机器人
人形机器人是仿照人类形态设计的通用双足机器人,旨在与人类一起工作以提高生产力。它们能够学习和执行各种任务,例如抓取物体、移动货柜、装卸箱子等等。
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02



评论