 【技术分享】不懂CAN协议?如何避免总线仲裁失败?
【技术分享】不懂CAN协议?如何避免总线仲裁失败?

 CAN仲裁的实现方式
CAN仲裁的实现方式
图1标准CAN数据帧格式
2. CAN总线仲裁机制的实现
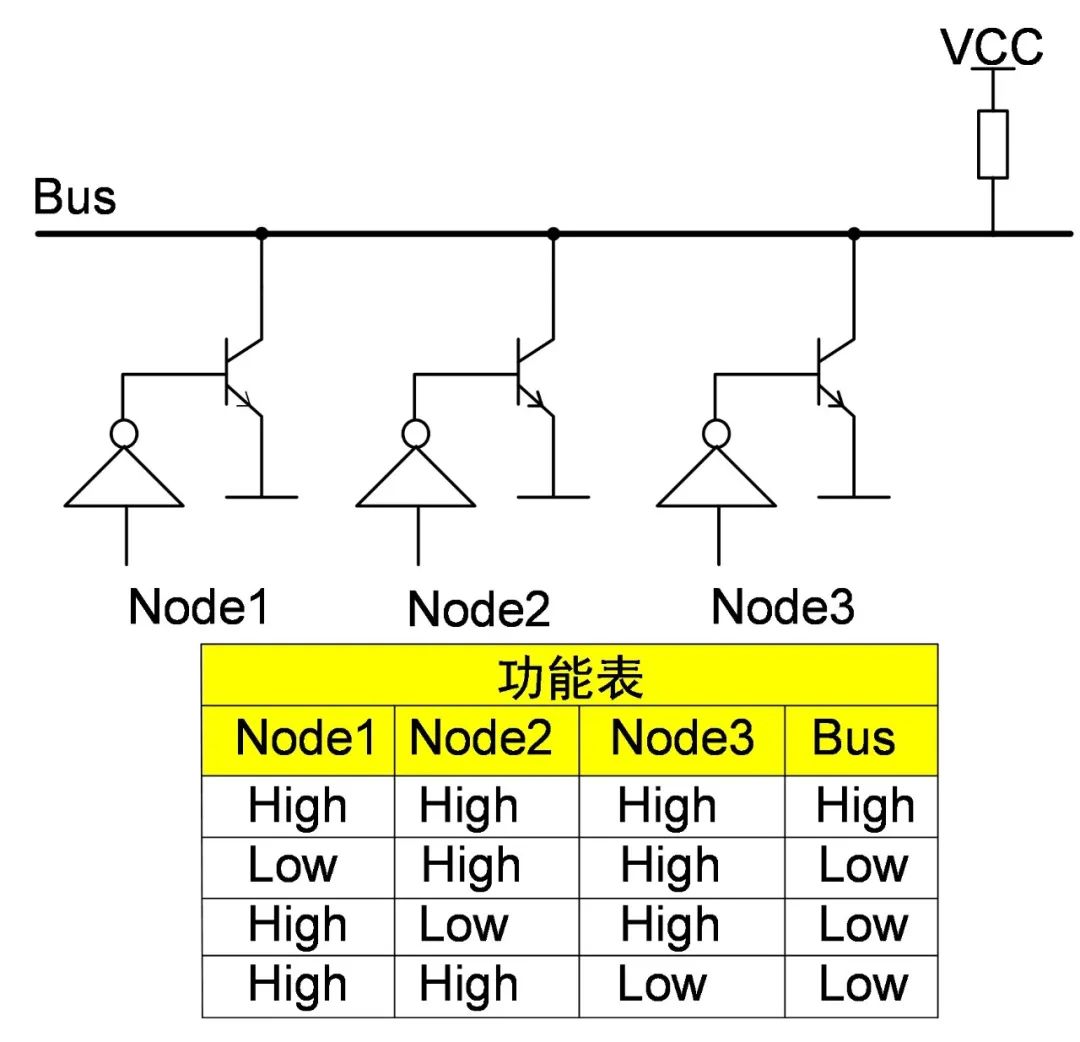
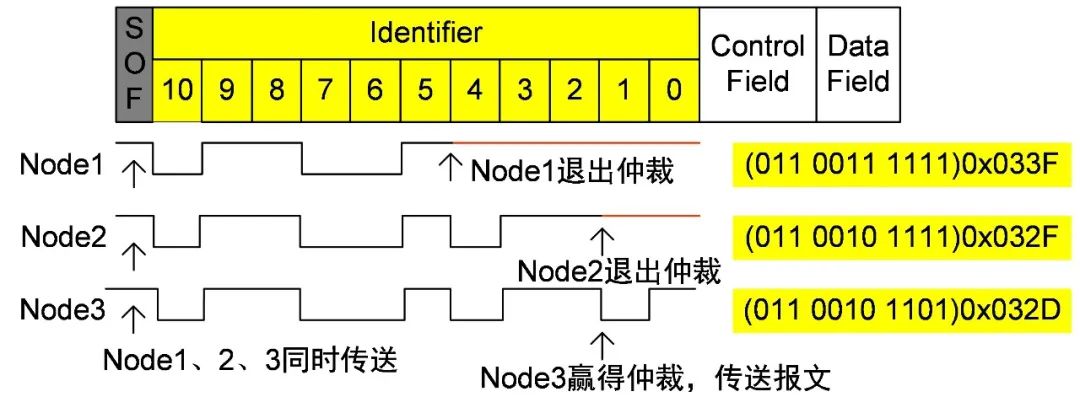
图3总线仲裁方式图
CANID冲突发生的条件及现象本文以我司协议转换模块CSM300为例进行介绍,CSM300是集成微处理器、CAN-bus控制器、CAN-bus收发器、DC-DC转换、高速数字隔离于一体的嵌入式CAN与UART/SPI双向转换模块。如果我们将两个ID均为00000000的CSM300模块组成一个CAN总线网络系统,当这两个ID相同的模块同时往CAN总线端发送数据时将会造成仲裁失败。
2. CANID冲突的现象
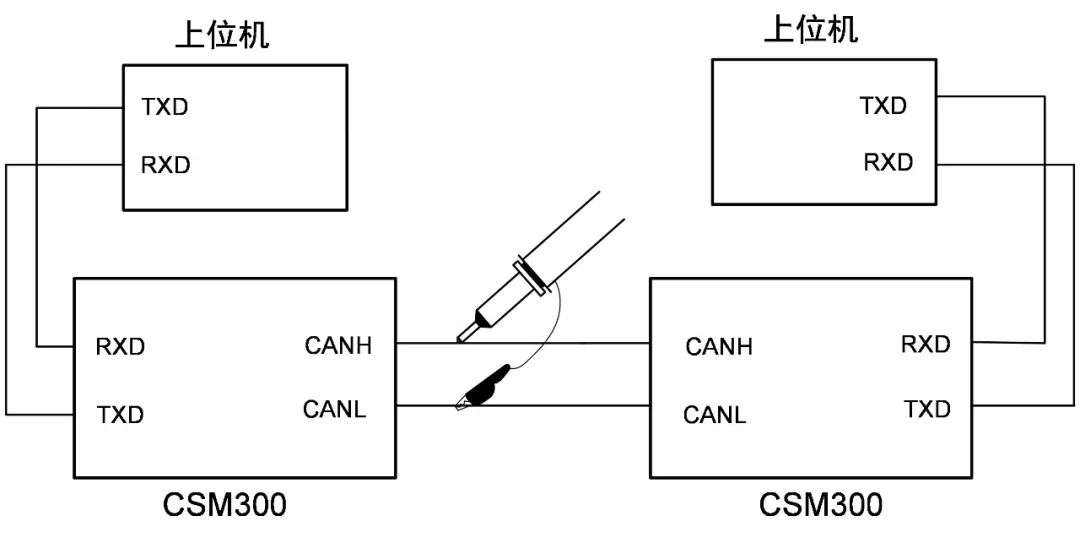
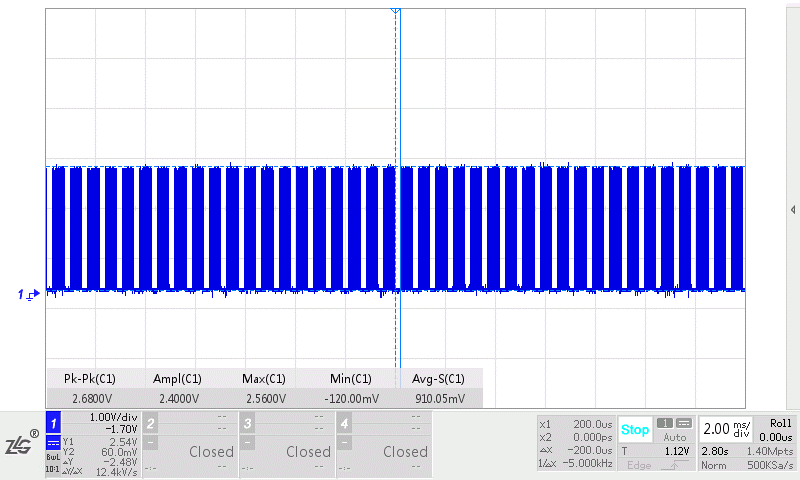
图5CAN总线波形图
CSM系列如何避免CANID冲突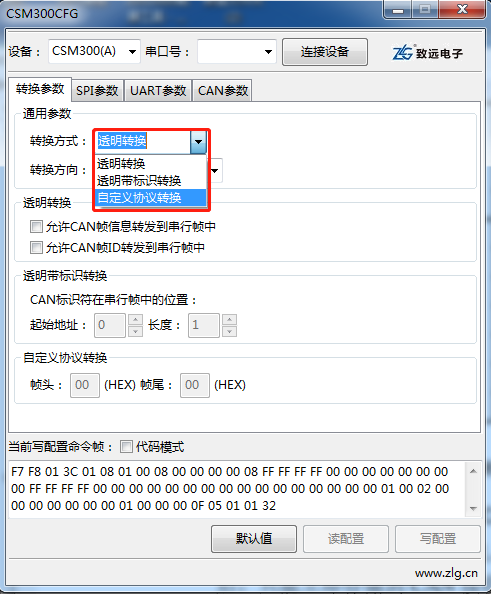
图6转换方式选配图
透明带标识转换方式下,用户可以在配置时固定CANID在串行帧的位置和长度如图7所示,通过改变串行帧数据来控制所发数据的CAN帧ID,方便用户在同一节点发送不同ID的CAN数据。但是此模式下需要确保串行帧的时间间隔足够大,避免模块不能正确识别每组串行帧的结束造成数据转换错误。透明带标识模式下串行帧最小间隔具体要求可参考CSM100和CSM300的用户手册。
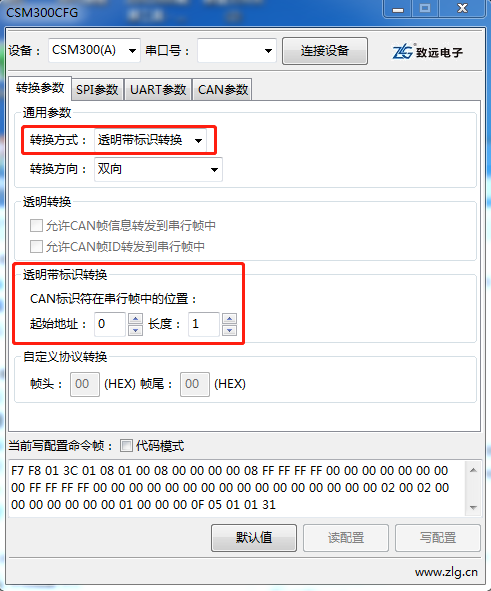
图7透明带标识转换配置图
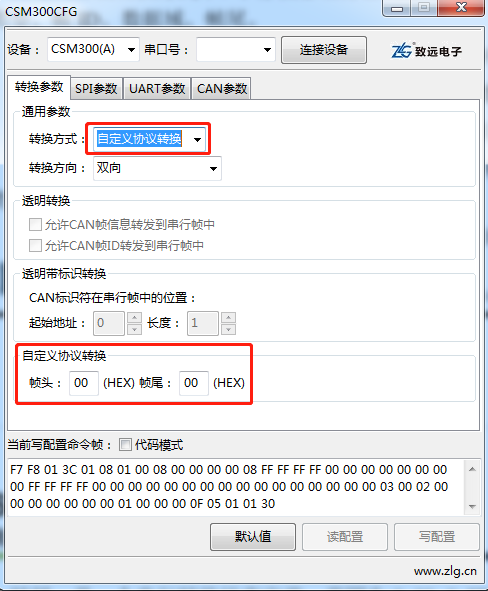
有效的自定义协议转换串行帧包括了帧头、帧尾、帧ID和帧长度等,用户可通过改变串行帧数据来控制CAN帧ID,方便用户在同一节点发送不同ID的CAN数据。同时用户将在配置时固定帧头和帧尾如图8所示,此模式下用户通过串行帧数据告知模块串行帧的帧头、帧尾和数据长度,故此转换方式下可有效避免因串行帧间隔时间短造成的数据转换错误的情况。







原文标题:【技术分享】不懂CAN协议?如何避免总线仲裁失败?
文章出处:【微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
-
致远电子
+关注
关注
13文章
424浏览量
32655
原文标题:【技术分享】不懂CAN协议?如何避免总线仲裁失败?
文章出处:【微信号:ZLG_zhiyuan,微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于FPGA的轻量级CAN总线控制器实现方案

CAN总线报错看不懂?5种错误帧+5步排查法一次讲清


瑞芯微(EASY EAI)RV1126B CAN使用

I2C的SDA仲裁介绍
圆满收官 | 虹科CAN总线专题全系列直播精华回顾已上线!

直播回顾 | CAN XL新标准落地难?从协议解析到实践应用,虹科技术专家带您全面探索CAN XL的技术突破与落地
双轨速成:掌握CAN总线应用的实战秘籍
120Ω的秘密:CAN总线终端电阻的重要性

打破协议壁垒,CAN转EtherCAT连接工业相机秒变跨国CP”!
一文读懂CAN XL协议
CAN总线采样点不一致的危害
CAN总线协议网关模块与数据采集器:工业自动化数据交互中枢




评论