 如何选择相机与对应的镜头
如何选择相机与对应的镜头

相机和镜头是机器视觉中重要的组成部分,合适的相机和镜头决定了系统的好坏。本文介绍如何选择相机与对应的镜头。
相机成像原理
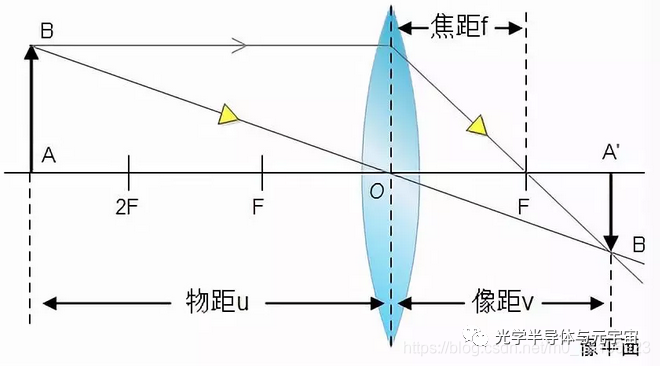
凸透镜成像有几个关键的点需要记住:
1物距大于2倍焦距以外,实像;
物距等于2倍焦距,实像;
物距在1到2倍焦距之间,实像;
物距等于1倍焦距,不成像;
物距在1倍焦距以内,虚像。
图像分辨率、系统分辨率和像素分辨率
图像分辨率、系统分辨率和像素分辨率是机器视觉系统设计时较常见的参数,它们通常与客户对机器视觉系统的需求关系最为密切,是选择相机和镜头的重要依据。
图像分辨率指图像中存储的信息量,是每英寸图像内有多少个像素点,分辨率的单位为PPI(Pixels Per Inch),通常叫做像素每英寸。图像分辨率一般被用于PS中,用来改变图像的清晰度。
系统分辨率指成像系统可以识别出监测目标的最小细节或最小特征。诸如“要求系统能检测0.1mm的目标"、"要求系统测量精度达到0.01mm"之类的要求一般都和系统分辨率相关。
像素分辨率指为了表示检测目标所需要的像素数。一般情况下,可以根据客户对检测目标中最小特征的要求来确定最小像素分辨率。如果将整个图像看作周期为最小特征大小的周期信号,则根据奈奎斯特采样定律,必须对信号每个周期采样2个点以上,才能完整恢复该信号。因此如果客户没有特别要求,常用至少两个像素来代表检测目标中的最小特征,这可被看作是图像传感器的奈奎斯特定律。
图像传感器应具备的最小像素分辨率常通过下面的公式计算:
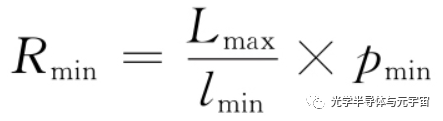
Rmin为最小像素分辨率。
Lmax为检测目标的最大长度。
lmin为检测目标的最小特征长度(视觉系统的分辨率)。
pmin为表示最小特征的像素数。
在无特别要求时,pmin=2,如果客户要求使用多于2像素来表示最小特征,则最小分辨率将适当增加。
视场
视场(Field of View,FOV)指成像系统中图像传感器可以监测到的最大区域。在机器视觉系统设计时,考虑到一般都会使被检测目标尽量填满整视场,因此常用视场大小代替目标的最大长度Lmax来计算视觉系统的像素分辨率。如下图(a)所示,表示被检测目标在水平方向上占据整个视场,而图(b)表示目标未填满视场。
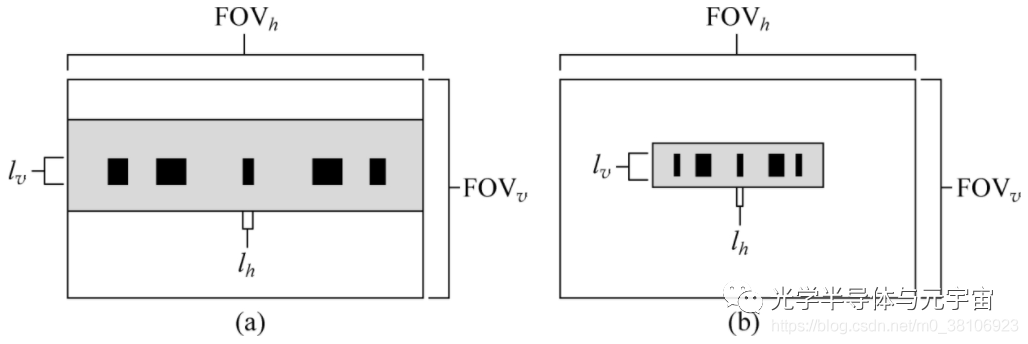
如果横纵方向上视场大小为[FOVh,FOVv],检测目标的最小特征的大小为[Ih,lv],则图像传感器应具有的最小像素分辨率为:

成像系统视场的大小可以通过研究其成像规律得知。目前,机器视觉系统常用使用配备各种镜头系统的工业CCD/CMOS相机作为成像系统,透镜成像示意图如下所示:
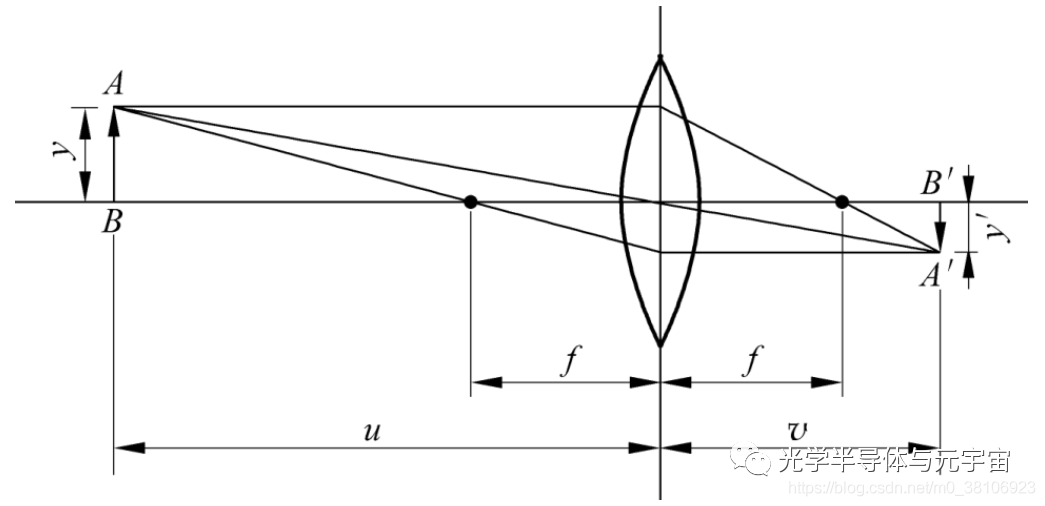
镜头系统一般使用透镜系统,其成像遵循高斯成像公式:
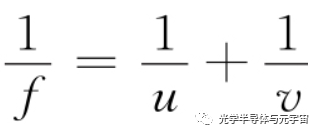
f为透镜焦距(focal length,凸正凹负)。
u为物距。
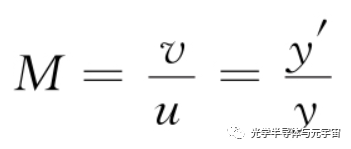
v为像距(实正虚负)。如下图所示。通常将像距与物距的比值定义为透镜的放大率M:
镜头系统简化模型
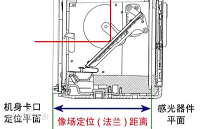
由于对机器视觉成像系统来说,相机镜头到所检测目标的距离(称为工作距离,相当于物距)相对于相机焦距可近似认为是无穷远。若将其带入高斯成像公式,可得出此时相机像距近似等于其焦距,也就是说相机成像在焦平面上。据此,可以将镜头系统抽象为类似小孔成像的简化模型,如下图所示:
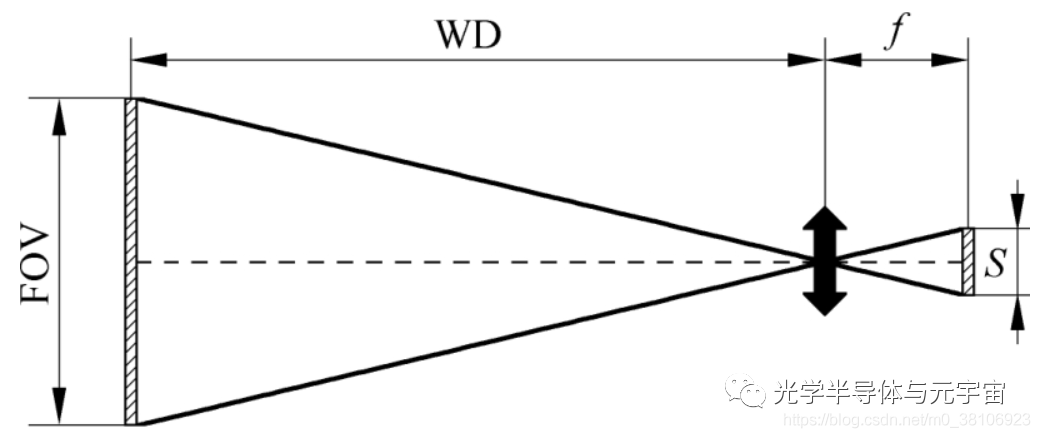
根据该简化模型,可以得出机器视觉系统图像传感器尺寸S(传感器平面某个方向上的长度)、视场FOV、工作距离WD及镜头焦距f之间的约束关系:
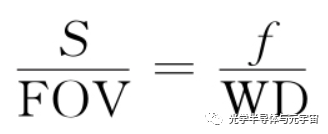
此时,M则可以等效为:
如果进一步将前述最小像素分辨率的计算公式与该约束关系结合(用视场FOV代替目标的最大长度Lmax),则可以得出以下成像系统简化模型的参数约束关系:

该公式所显示的参数间的相互约束关系是机器视觉系统设计和搭建部署时系统设计和设备选型的基础。
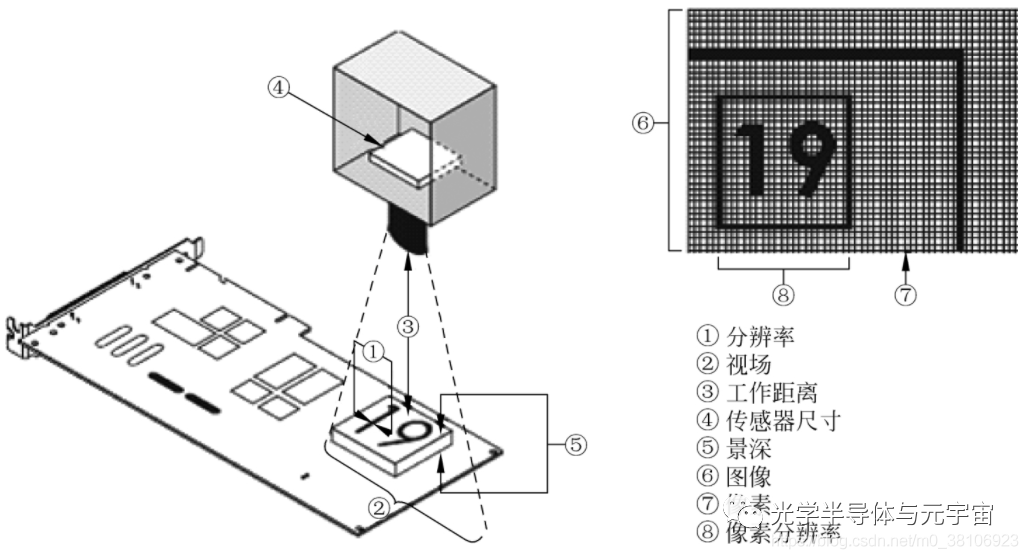
实际中传感器尺寸S可以通过查询相机的技术规范获知,焦距f、工作距离WD直接由所选择的镜头决定。在已知这些参数时,可以很容易地计算出视场FOV。相机的像素分辨率由其有效像素区域(即传感器尺寸)决定,通常用横向和纵向有效像素数来表示(如768×576)。为机器视觉系统所选择的相机像素分辨率,必须大于或等于按照项目需求(包括对最小特征尺寸lmin和用于表示最小特征的像素数pmin的要求)计算出的最小像素分辨率Rmin。下图进一步显示了公式中涉及的参数含义:
镜头与相机的选型
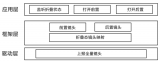
工业机器视觉系统中,镜头与相机的选型非常重要。如果事先既未确定相机又未确定镜头,则需要先了解项目工作环境对相机安装(工作距离)、要检测的最大范围(视场)、最小特征的尺寸和代表它的像素数的要求,然后根据这些条件来计算应使用何种镜头或相机。下图为机器视觉项目选择镜头和相机的简化流程:
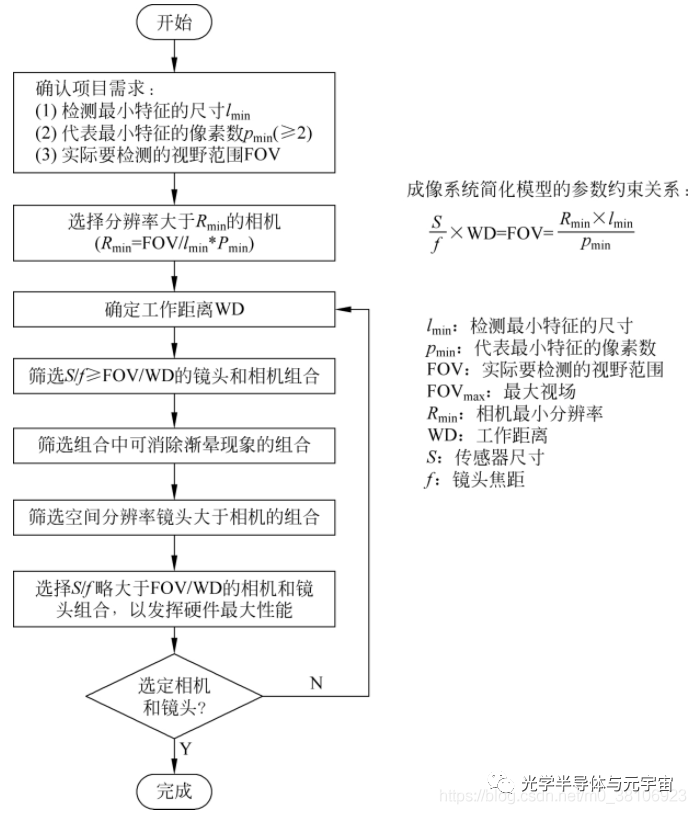
无论何种情况,都是基于成像系统简化模型的参数约束关系和项目需求获取最优搭配的过程。
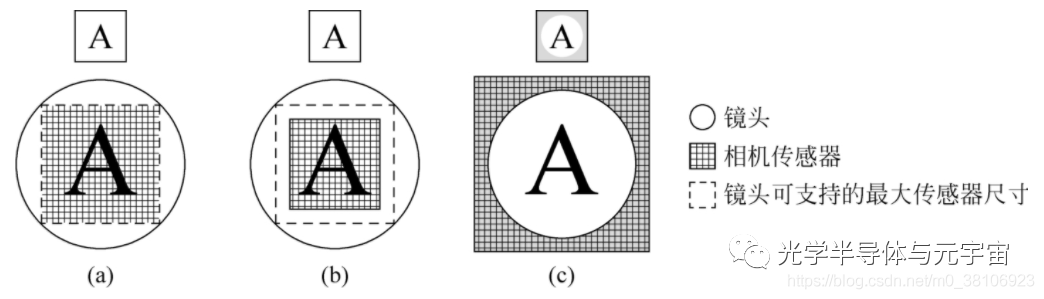
鉴于镜头能清楚成像的范围受到最大像面的限制,因此在为相机选配镜头时,要特别注意相机传感器与镜头可支持最大传感器之间的关系。
一般来说,必须确保所选镜头可支持的最大传感器尺寸大于或等于相机的传感器尺寸。这样做的另一个主要原因是为了避免渐晕(Vignetting)现象的发生。
如图下图(c)所示,如果相机传感器的尺寸大于镜头可支持的最大传感器尺寸时,所生成的图像就会形成类似隧道的效果,该现象称为渐晕现象。渐晕现象会增加机器视觉系统的开发难度,因此应尽量避免。下图中的(a) 、(b)分别显示了在镜头可支持的最大传感器尺寸等于或大于相机的传感器尺寸时视觉系统的成像情况,这两种情况下机器视觉系统均能正常工作。
景深也是一个与镜头和成像系统关系十分密切的参数,它是指在镜头前沿着光轴所测定的能够清晰成像的范围,如下图所示:
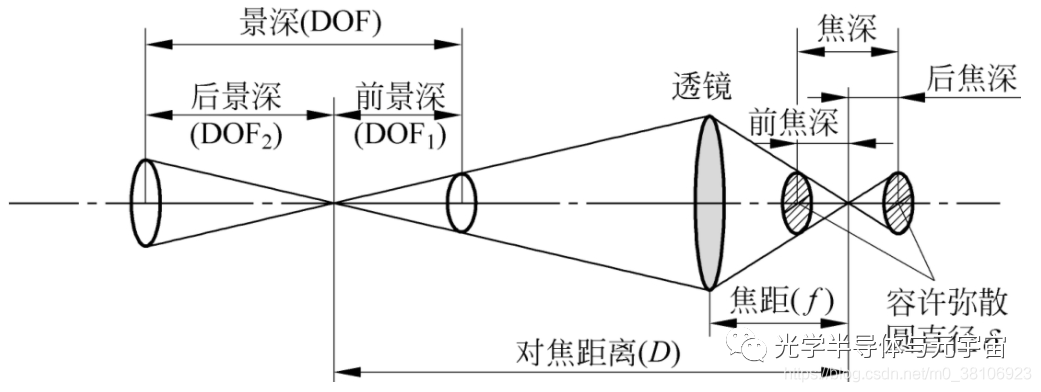
在成像系统的焦点前后,物点光线呈锥状开始聚集和扩散,点的影像沿光轴在焦点前后逐渐变得模糊,形成一个扩大的圆,这个圆称为弥散圆(circle of confusion)。若这个圆形影像的直径足够小(离焦点较近),成像会足够清晰,如果圆形再大些(远离焦点),成像就会显得模糊。当在某个临界位置所成的像不能被辨认时,则该圆就被称为容许弥散圆(permissible circle of confusion)。焦点前后两个容许弥散圆之间的距离称为焦深。在目标物一侧,焦深对应的范围就是景深。
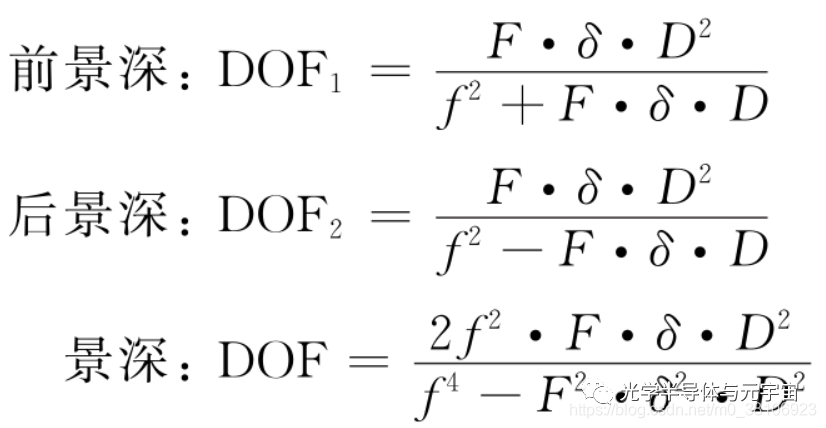
为容许弥散圆的直径。
f为镜头焦距。
D为对焦距离。
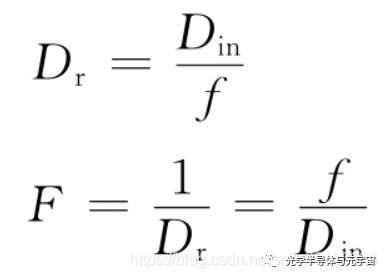
F为镜头的拍摄光圈(aperture)值。光圈值F常用镜头焦距和镜头入瞳的有效直径Din的比值来表示,它是镜头相对孔径Dr的倒数,即:
从景深公式可以看出,后景深要大于前景深,而且景深一般随着镜头的焦距、光圈值、对焦距离(可近似于拍摄距离)的变化而变化。在其他条件不变时:
光圈越大(光圈值F越小),景深越小;光圈越小(光圈值F越大),景深越大。
镜头焦距越长,景深越小;焦距越短,景深越大。
距离越远,景深越大;距离越近,景深越小。
在检测目标的高度在一定范围内可能变化的情况下,选择合适的景深,对于机器视觉系统的稳定性尤为重要。
普通镜头和远心镜头
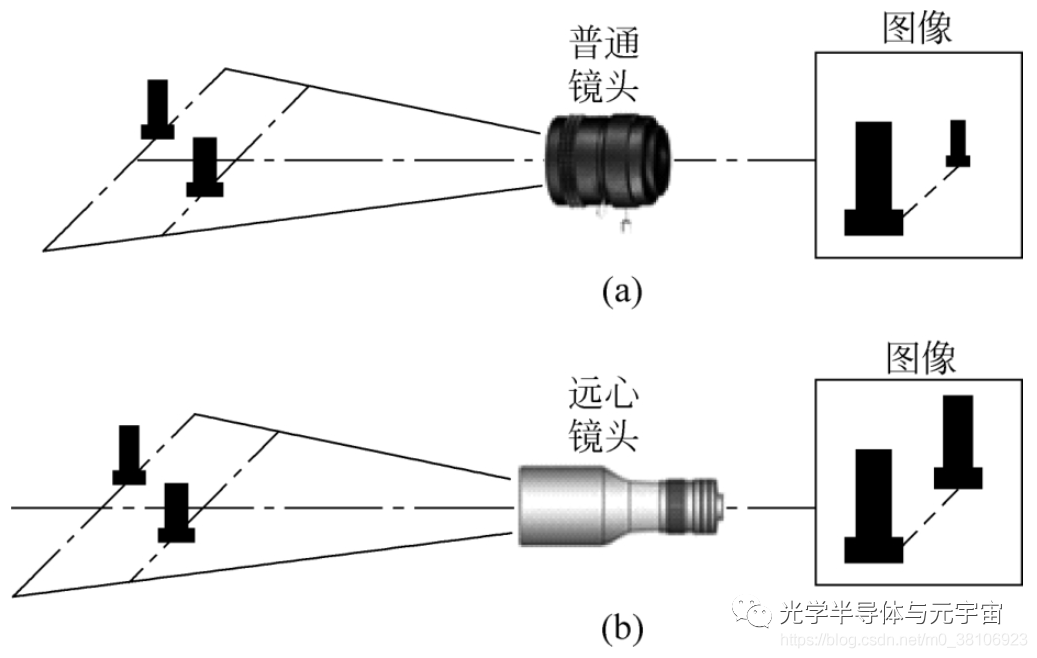
普通镜头与人眼一样,观测物体时都存在"近大远小”的现象,如下图 (a)所示。也就是说,虽然物体在景深范围内可以清晰成像,但是其成像却随着物距增大而缩小。如果被测目标不在同一物面上(如有厚度的物体),则会导致图像中的物体变形。另一方面,相机传感器的感光面通常并不容易被精确调整到与镜头的像平面重合(调焦不准),由此也会产生误差。为此,人们设计了远心镜头。
远心镜头(telecentric lens)有较大的景深,且可以保证景深范围内任何物距都有一致的图像放大率,如下图 (b)所示。多数机器视觉在测量、缺陷检测或者定位等应用上,对物体成像的放大倍率没有严格要求,一般只要选用畸变较小的镜头,就可以满足要求。但是,当机器视觉系统需要检测三维目标(或检测目标不完全在同一物面上)时,就需要使用远心镜头。
例如,要检测厚度大于视场直径的1/10的物体,或需要检测带孔径、三维的物体等。一般来说,如果被测目标物面变化范围大于视场直径的1/10时,就需要考虑使用远心镜头。它可以确保测试过程中物距在一定范围内改变时,系统放大倍数保持不变,从而保证系统的测量精度。
-
镜头
+关注
关注
3文章
550浏览量
26876 -
相机
+关注
关注
5文章
1646浏览量
56115 -
机器视觉
+关注
关注
166文章
4857浏览量
126841
原文标题:机器视觉系统设计,如何选择合适的相机和镜头
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
选择合适的工业镜头助力获取圆柱体零件内表面清晰图像


法兰距离:相机镜头系统的关键参数
线扫镜头的选型指南

工业相机的镜头参数在行业最新标准中是如何解释的

含酒精擦镜纸会损伤镜头镀膜吗

镜头分辨率如何匹配工业相机的分辨率

为什么360°镜头容易“踩坑”?

HarmonyOS折叠屏镜头切换应用实践
工业相机与智能相机的区别



掌握工业镜头选型秘籍,轻松实现精准成像

如何为工业相机匹配最佳的镜头




评论