 蓝牙遥控履带底盘行驶
蓝牙遥控履带底盘行驶

1. 功能描述
本文提供的示例所实现的功能为:用手机APP遥控斜三角履带底盘样机实现移动,包括前进、停止、后退、原地左转、原地右转。
2. 电子硬件
在这个示例中,采用了以下硬件,请大家参考:
Basra主控板(兼容Arduino Uno)、Bigfish2.1扩展板、7.4V锂电池、蓝牙串口模块
为斜三角履带底盘样机安装蓝牙串口模块,斜三角履带底盘样机有两种摆放方式:

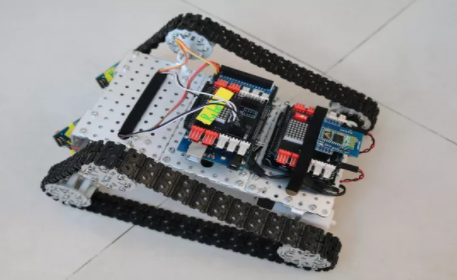
车身右侧为安装了蓝牙串口模块的主控板,左侧控制板请忽略
3. 示例程序
编程环境:Arduino 1.8.19
程序通过使用if语句来判断读取到的串口的不同字符值来匹配不同的动作,从而实现对机器人的远程控制。
接收到“1”的时候,执行前进;
接收到“2”的时候,执行后退;
接收到“3”的时候,执行左转;
接收到“4”的时候,执行右转;
接收到“5”的时候,执行停止;
手机APP的键值按上述规则进行配置,然后单片机接收到不同的信息,对应执行不同的动作。
例程代码(robot_ble_control.ino)如下:
|
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-9-28 https://www.robotway.com/ ------------------------------ 实功能: 从串口(蓝牙)接收字符,根据不同字符分别做出前进、后退、停止、原地左转、原地右转的动作。 ----------------------------------------------------- 实验接线: 左轮:D9,D10 右轮:D5,D6。 ------------------------------------------------------------------------------------*/ int _ABVAR_1_Bluetooth_data = 0 ; void Left(); void Stop(); void Right(); void Back(); void Forward(); void setup() { Serial.begin(9600); pinMode( 5 , OUTPUT); pinMode( 6 , OUTPUT); pinMode( 9 , OUTPUT); pinMode( 10 , OUTPUT); } void loop() { _ABVAR_1_Bluetooth_data = Serial.parseInt() ; if (( ( _ABVAR_1_Bluetooth_data ) > ( 0 ) )) { if (( ( _ABVAR_1_Bluetooth_data ) == ( 1 ) )) { Forward(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 2 ) )) { Back(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 3 ) )) { Left(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 4 ) )) { Right(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 5 ) )) { Stop(); } } } void Right() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , LOW ); digitalWrite( 9 , LOW ); digitalWrite( 10 , HIGH ); } void Back() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , LOW ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , LOW ); } void Left() { digitalWrite( 5 , LOW ); digitalWrite( 6 , HIGH ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , LOW ); } void Forward() { digitalWrite( 5 , LOW ); digitalWrite( 6 , HIGH ); digitalWrite( 9 , LOW ); digitalWrite( 10 , HIGH ); } void Stop() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , HIGH ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , HIGH ); } |
审核编辑 黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
30627浏览量
219708 -
蓝牙
+关注
关注
119文章
6231浏览量
177599
发布评论请先 登录
相关推荐
热点推荐
格陆博科技亮相盖世汽车2025底盘大会
11月19日,盖世汽车举办的底盘大会隆重召开,本届大会紧扣「智创底盘 擎动未来」主线,聚焦线控转向冗余安全架构、底盘与智驾域深度融合、EMB规模化落地、智能悬架AI协同控制、线控转向与智能辅助驾驶协同等热点议题,携手智能
智能语音遥控器低功耗BLE蓝牙芯片
随着AI技术持续进步,支持语音识别功能的电视机、机顶盒等设备已广泛普及。在这一趋势下,搭载BLE蓝牙芯片的语音遥控器逐步替代传统红外遥控,成为新一代电视产品的标准配件。从红外到射频,从按键到语音
蓝牙语音遥控器方案 NRF52840、HS6621
方案介绍 蓝牙语音遥控器一般是通过按下语音键,遥控器会发送一个 HID 编码通知智能电视或者机顶盒打开识音功能,此时,遥控器LED灯保持闪烁或者长亮,用户开始录音同时将语音数据上传给智

索尼推出无线蓝牙拍摄手柄GP-VPT3与遥控器RMT-VP2
近日,索尼(中国)有限公司发布新一代无线蓝牙拍摄手柄GP-VPT3和无线蓝牙遥控器RMT-VP2。
蓝牙语音遥控器:智能家居的智慧控制核心
随着智能家居的蓬勃发展,蓝牙语音遥控器凭借其便捷的操作和智能交互体验,正迅速取代传统红外遥控器,成为智能电视、机顶盒等设备的首选控制工具。 相较于需对准设备的红外遥控器,

蓝牙语音遥控器:智能家居的智慧控制核心
随着智能家居的蓬勃发展,蓝牙语音遥控器凭借其便捷的操作和智能交互体验,正迅速取代传统红外遥控器,成为智能电视、机顶盒等设备的首选控制工具。
相较于需对准设备的红外遥控器,
发表于 06-01 20:24
蓝牙语音遥控器 低功耗芯片选型HS6621CxC/OM6621
随着智能家居的蓬勃发展,蓝牙语音遥控器凭借其便捷的操作和智能交互体验,正迅速取代传统红外遥控器,成为智能电视、机顶盒等设备的首选控制工具。相较于需对准设备的红外遥控器,
发表于 05-22 15:23
蓝牙语音遥控国产适用芯片HS6621
在智能家居的时代,科技正在改变我们的生活方式。蓝牙语音遥控器,作为智能家居的关键组成部分,正在重新定义用户与设备之间的互动方式。用户对着蓝牙语音遥控器,只要轻说一句话就可以搞定很多复杂
发表于 04-30 16:21
KT6368A的蓝牙芯片新增抖音翻页点赞自拍遥控器说明书 包含AT指令
蓝牙HID,实际上指的就是蓝牙键盘、蓝牙鼠标、蓝牙遥控器等等设备类型,都称之为人机交互设备。这里我们KT6368A
OM6621E 低功耗BLE5.1协议Soc芯片 蓝牙语音遥控器原理应用
蓝牙语音遥控器的原理是利用蓝牙技术实现无线通信和语意识别技术实现语音控制。蓝牙语音遥控器由两部分组成,一个是
发表于 01-14 15:01
宁德时代发布“磐石底盘”,树立智能底盘安全新标杆
近日,全球汽车科技领域迎来了一项重大突破——宁德时代正式发布了全球首款超高安全滑板底盘“磐石底盘”。这款底盘凭借卓越的安全性能,重新定义了智能底盘的安全标准。 “磐石
OM6621E 低功耗BLE5.1协议Soc芯片 蓝牙语音遥控器原理应用
蓝牙语音遥控器的原理是利用蓝牙技术实现无线通信和语意识别技术实现语音控制。蓝牙语音遥控器由两部分组成,一个是
发表于 12-20 11:18
一文了解底盘域控之制动功能
1底盘域控基础1.1底盘域控的概念1.2线控底盘技术1)线控制动系统2)线控转向系统2制动系统功能2.1制动系统原理2.2制动系统的发展历史2.3电子稳定系统ESP2.4线控制动系统--EHB1





 工商网监
工商网监
评论