 玩转OpenHarmony PID:教你打造两轮平衡车
玩转OpenHarmony PID:教你打造两轮平衡车

点击蓝字 ╳ 关注我们

王维平
OpenHarmony知识体系工作组
简介




硬件配置资源
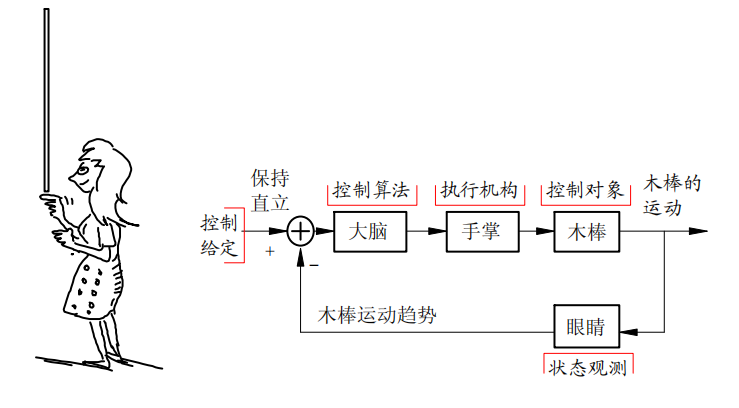
原理概括

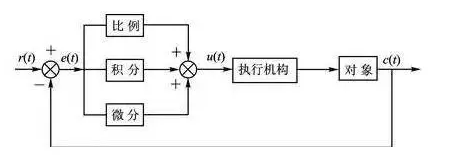
PID算法介绍

两步搭建样例工程


关键算法讲解


float g_middleAngle = 1.0;//平衡角度
float g_kpBalance = -85800.0;
float g_kdBalance = -400;
static int ControlBalance(float angle, short gyro)
{
int outpwm = 0;
float angleBias = 0.0;
float gyroBias = 0.0;
float tempAngle = 0.0;
float tempGyro = 0.0;
tempAngle = 0 - angle;//极性控制
tempGyro = 0 - gyro;
angleBias = g_middleAngle - tempAngle;
gyroBias = 0 - tempGyro;
outpwm = (g_kpBalance / 100 * angleBias + g_kdBalance
* gyroBias / 100);
return outpwm;
}float g_kpSpeed = 95800.0;
float g_kiSpeed = 200;
static int ControlSpeed(long int left, long int right)
{
int outpwm = 0;
int speedBias = 0;
int speedBiasLowpass = 0;
static int speed_i = 0;
float a = 0.68;
static int speedBiasLast = 0;
speedBias = 0 - left - right;
speedBiasLowpass = (1 - a) * speedBias
+ a * speedBiasLast;
speedBiasLast = speedBiasLowpass;
speed_i += speedBiasLowpass;
speed_i = limit_data(speed_i, SPEED_H, SPEED_L);
outpwm = (g_kpSpeed * speedBiasLowpass / 100 +
gkiSpeed * speed_i / 100);
return outpwm;
}static int ControlTurn(short gyro)
{
int outpwm;
outpwm = g_kpTurn * gyro;
return outpwm;
}总结
相关链接
https://gitee.com/openharmony/docs/blob/master/zh-cn/release-notes/OpenHarmony-v3.2-beta1.md
https://gitee.com/openharmony-sig/vendor_oh_fun
https://gitee.com/bearpi/bearpi-hm_nano/tree/master/applications/BearPi/BearPi-HM_Nano/docs/quick-start
https://gitee.com/openharmony-sig/knowledge/blob/master/docs/co-construct_demos/README_zh.md
https://growing.openharmony.cn/mainPlay/learnPathMaps?id=19
https://gitee.com/openharmony-sig/knowledge_demo_smart_home
原文标题:玩转OpenHarmony PID:教你打造两轮平衡车
文章出处:【微信公众号:OpenAtom OpenHarmony】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
鸿蒙
+关注
关注
60文章
3021浏览量
46178 -
OpenHarmony
+关注
关注
33文章
3974浏览量
21362
原文标题:玩转OpenHarmony PID:教你打造两轮平衡车
文章出处:【微信号:gh_e4f28cfa3159,微信公众号:OpenAtom OpenHarmony】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
两轮车后向安全难题迎突破,毫米波雷达开启智能防护新时代
本文聚焦两轮电动车后向安全痛点,分析变道盲区、倒车视线受阻、追尾预警缺失三大安全隐患。介绍飞睿智能毫米波雷达后向预警解决方案,阐述其在盲区监测、变道预警、防碰撞预警三大场景的应用价值,展现该技术为两轮

百度地图技术引擎重塑两轮车导航新体验
随着城市出行结构不断演变,两轮车正成为短途通勤与灵活交通的重要支柱。在这一浪潮中,百度地图不再只是汽车驾驶员的导航助手,而是以前瞻性布局与技术纵深,悄然成为两轮车智能化变革的核心推手。
基于Power PROFET™ BTS50010 - 1TAE的两轮车启动继电器设计方案
基于Power PROFET™ BTS50010 - 1TAE的两轮车启动继电器设计方案 在两轮车(摩托车和踏板车)的设计领域,启动继电器的性能和可靠性至关重要。传统的机电继电器在应对
四维图新发布两轮车智能化解决方案
10月28日,2025四维图新Evolution创想大会在北京召开。会上,四维图新CEO程鹏正式发布两轮车智能化解决方案。方案深度整合全链条核心技术,为企业、运营方及监管部门提供全方位支撑,加速两轮车行业从 “机械化” 向 “智
ASM1042A3S车规级CANFD芯片在两轮车和平衡车控制器方案中的技术应用
摘要 本文以国科安芯推出的ASM1042A3S车规级CAN FD芯片为例,讨论在两轮车与平衡车控制器方案中的技术应用。通过对芯片核心技术特点
四维图新参与编制两轮车智能化技术发展路线图
近日,由中国电子商会智能电动汽车专委会牵头,联合天津内燃机研究所(天津摩托车技术中心)与两轮车智能化技术创新中心共同发起、四维图新承办的《两轮车智能化技术发展路线图(2025-2035
新国标全面施行,利尔达智能云盒正为两轮车装上“最强大脑”……
//面对新国标强监管与消费市场升级的双重驱动,两轮车产业正经历一场前所未有的智能化变革……随着2025年9月1日电动自行车新国标的全面实施,两轮车市场正加速向“安全化、网联化、智能化”转型。新国标

赋能两轮车新国标 | 匠芯创D13x系列芯片为手机无线投屏与导航提供核心支持
近日,匠芯创推出基于D13x系列工业级显示控制芯片的两轮车无线投屏解决方案。该方案积极响应两轮车新国标智能化要求,以极高的性价比为核心优势,支持Android与iOS双系统无线投屏,具

电动两轮车仪表盘2.0时代来临,开启智慧出行新潮流
电动两轮车2.0时代自2004年电动自行车企业大规模成立以来,两轮电动车在技术和市场方面都取得了显著进展。随着技术的创新和市场需求的增长,两轮
晶华微新欧标两轮车BMS解决方案
目前,随着市场对于轻便两轮车的需求增加,锂电池在电动两轮车动力系统中的普及率也进一步提升。对于电池系统的智能化、自动化控制,以及对电池系统的实时状态监测显得越来越重要。

杰发科技亮相2025年两轮车智能化技术发展大会
此前,5月9日-10日,由中国电子商会智能电动汽车专委会、国家摩托车检验检测中心(天津)及莆田市荔城区人民政府共同主办的2025年两轮车智能化技术发展大会在莆田市举行。在会议期间举行的两轮车
武汉芯源半导体CW32L010在两轮车仪表的应用介绍
CW32L010凭借其优异的性能、丰富的外设资源和超低功耗特性,为两轮车仪表盘应用提供了高性价比的解决方案。其宽电压工作范围和工业级温度特性,特别适合车辆电子应用的严苛环境。对于想采用CW32L010进行两轮

武汉芯源半导体CW32L010在两轮车仪表的应用介绍
随着两轮电动车的智能化发展,仪表盘作为人机交互的重要界面,其功能需求日益复杂。武汉芯源半导体的安全低功耗单片机CW32L010凭借其优异的性能和丰富的外设资源,成为两轮车仪表盘应用的理
发表于 05-13 14:06



评论