 如何设定PendSV优先级?
如何设定PendSV优先级?

先了解下如何使用PendSV异常。(为何要使用PendSV而不是其他的异常,请参考《cortex-M3权威指南》)
1,如何设定PendSV优先级?
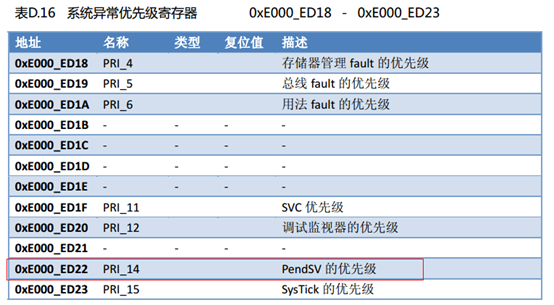
NVIC_SYSPRI14EQU0xE000ED22
NVIC_PENDSV_PRIEQU0xFF
LDRR0,=NVIC_SYSPRI14LDRR1,=NVIC_PENDSV_PRI
STRBR1,[R0]
2,如何触发PendSV异常?

往ICSR第28位写1,即可将PendSV异常挂起。若是当前没有高优先级中断产生,那么程序将会进入PendSV handler
NVIC_INT_CTRLEQU0xE000ED04
NVIC_PENDSVSETEQU0x10000000
LDRR0,=NVIC_INT_CTRL
LDRR1,=NVIC_PENDSVSET
STRR1,[R0]
3,编写PendSV异常handler
这里用PendSV_Handler来触发LED点亮,以此证明PendSV异常触发的设置是正确的。
#include"stm32f10x_conf.h"
#defineLED0*((volatileunsignedlong*)(0x422101a0))//PA8
unsignedcharflag=0;
voidLEDInit(void)
{
RCC->APB2ENR|=1<<2;
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000003;
GPIOA->ODR|=1<<8;
}
__asmvoidSetPendSVPro(void)
{
NVIC_SYSPRI14EQU0xE000ED22
NVIC_PENDSV_PRIEQU0xFF
LDRR1,=NVIC_PENDSV_PRI
LDRR0,=NVIC_SYSPRI14
STRBR1,[R0]
BXLR
}
__asmvoidTriggerPendSV(void)
{
NVIC_INT_CTRLEQU0xE000ED04
NVIC_PENDSVSETEQU0x10000000
LDRR0,=NVIC_INT_CTRL
LDRR1,=NVIC_PENDSVSET
STRR1,[R0]
BXLR
}
intmain(void)
{
SetPendSVPro();
LEDInit();
TriggerPendSV();
while(1);
}
voidPendSV_Handler(void)
{
LED0=0;
}
上述代码可以正常点亮LED,说明PendSV异常是正常触发了。
OK,是时候挑战任务切换了。
如何实现任务切换?三个步骤:
步骤一:在进入中断前先设置PSP。
curr_task=0;
设置任务0为当前任务:
__set_PSP((PSP_array[curr_task]+16*4));
设置PSP指向task0堆栈的栈顶位置:
__set_CONTROL(0x3);
设置为用户级,并使用PSP堆栈:
__ISB();
指令同步隔离。
步骤二:将当前寄存器的内容保存到当前任务堆栈中。进入ISR时,cortex-m3会自动保存八个寄存器到PSP中,剩下的几个需要我们手动保存。
步骤三:在Handler中将下一个任务的堆栈中的内容加载到寄存器中,并将PSP指向下一个任务的堆栈。这样就完成了任务切换。
要在PendSV 的ISR中完成这两个步骤,我们先需了解下在进入PendSV ISR时,cortex-M3做了什么?
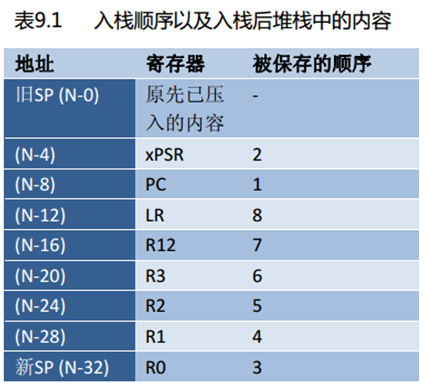
1,入栈。会有8个寄存器自动入栈。入栈内容及顺序如下:
 img
img在步骤一中,我们已经设置了PSP,那这8个寄存器就会自动入栈到PSP所指地址处。
2,取向量。找到PendSV ISR的入口地址,这样就能跳到ISR了。,
3,更新寄存器内容。
做完这三步后,程序就进入ISR了。
进入ISR前,我们已经完成了步骤一,cortex-M3已经帮我们完成了步骤二的一部分,剩下的需要我们手动完成。
在ISR中添加代码如下:
MRSR0,PSP
保存PSP到R0。为什么是PSP而不是MSP。因为在OS启动的时候,我们已经把SP设置为PSP了。这样使得用户程序使用任务堆栈,OS使用主堆栈,不会互相干扰。不会因为用户程序导致OS崩溃。
STMDBR0!,{R4-R11}
保存R4-R11到PSP中。C语言表达是*(--R0)={R4-R11},R0中值先自减1,然后将R4-R11的值保存到该值所指向的地址中,即PSP中。
STMDB Rd!,{寄存器列表} 连续存储多个字到Rd中的地址值所指地址处。每次存储前,Rd先自减一次。
若是ISR是从从task0进来,那么此时task0的堆栈中已经保存了该任务的寄存器参数。保存完成后,当前任务堆栈中的内容如下(假设是task0)
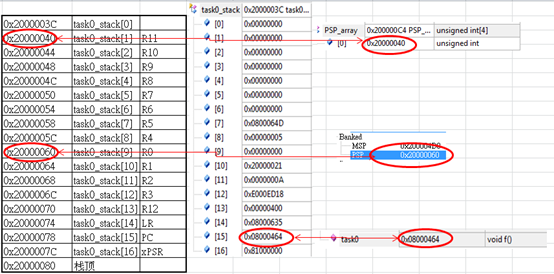
左边表格是预期值,右边是keil调试的实际值。可以看出,是一致的。在任务初始化时(步骤一),我们将PSP指向任务0的栈顶0x20000080。在进入PendSV之前,cortex-M3自动入栈八个值,此时PSP指向了0x20000060。然后我们再保存R4-R11到0x20000040~0x2000005C。
这样很容易看明白,如果需要下次再切换到task0,只需恢复R4~R11,再将PSP指向0x20000060即可。
所以切换到另一个任务的代码:
LDRR1,=__cpp(&curr_task)
LDRR3,=__cpp(&PSP_array)
LDRR4,=__cpp(&next_task)
LDRR4,[R4]
获取下一个任务的编号:
STRR4,[R1]
Curr_task=next_task
LDRR0,[R3,R4,LSL#2]
获得任务堆栈地址,若是task0,那么R0=0x20000040( R0=R3+R4*4)
LDMIAR0!,{R4-R11}
恢复堆栈中的值到R4~R11。R4=*(R0++)。执行完后,R0中值变为0x20000060
LDMIA Rd! {寄存器列表} 先将Rd中值所指地址处的值送出寄存器中,Rd再自增1.*
MSRPSP,R0
PSP=R0。
BXLR
中断返回。
完整代码
#include"stm32f10x.h"
#include"stm32f10x_usart.h"
#include"stm32f10x_gpio.h"
#include"stm32f10x_rcc.h"
#include"stdio.h"
#include"misc.h"
#defineHW32_REG(ADDRESS)(*((volatileunsignedlong*)(ADDRESS)))
#defineLED0*((volatileunsignedlong*)(0x422101a0))//PA8
voidUSART1_Init(void);
voidtask0(void);
unsignedcharflag=1;
uint32_tcurr_task=0;//当前执行任务
uint32_tnext_task=1;//下一个任务
uint32_ttask0_stack[17];
uint32_ttask1_stack[17];
uint32_tPSP_array[4];
u8task0_handle=1;
u8task1_handle=1;
voidtask0(void)
{
while(1)
{
if(task0_handle==1)
{
printf("task0
");
task0_handle=0;
task1_handle=1;
}
}
}
voidtask1(void)
{
while(1)
{
if(task1_handle==1)
{
printf("task1
");
task1_handle=0;
task0_handle=1;
}
}
}
voidLEDInit(void)
{
RCC->APB2ENR|=1<<2;
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000003;
GPIOA->ODR|=1<<8;
}
__asmvoidSetPendSVPro(void)
{
NVIC_SYSPRI14EQU0xE000ED22
NVIC_PENDSV_PRIEQU0xFF
LDRR1,=NVIC_PENDSV_PRI
LDRR0,=NVIC_SYSPRI14
STRBR1,[R0]
BXLR
}
__asmvoidTriggerPendSV(void)
{
NVIC_INT_CTRLEQU0xE000ED04
NVIC_PENDSVSETEQU0x10000000
LDRR0,=NVIC_INT_CTRL
LDRR1,=NVIC_PENDSVSET
STRR1,[R0]
BXLR
}
intmain(void)
{
USART1_Init();
SetPendSVPro();
LEDInit();
printf("OStest
");
PSP_array[0]=((unsignedint)task0_stack)+(sizeoftask0_stack)-16*4;
//PSP_array中存储的为task0_stack数组的尾地址-16*4,即task0_stack[1023-16]地址
HW32_REG((PSP_array[0]+(14<<2)))=(unsignedlong)task0;/*PC*/
//task0的PC存储在task0_stack[1023-16]地址+14<<2中,即task0_stack[1022]中
HW32_REG((PSP_array[0]+(15<<2)))=0x01000000;/*xPSR*/
PSP_array[1]=((unsignedint)task1_stack)+(sizeoftask1_stack)-16*4;
HW32_REG((PSP_array[1]+(14<<2)))=(unsignedlong)task1;/*PC*/
HW32_REG((PSP_array[1]+(15<<2)))=0x01000000;/*xPSR*/
/*任务0先执行*/
curr_task=0;
/*设置PSP指向任务0堆栈的栈顶*/
__set_PSP((PSP_array[curr_task]+16*4));
SysTick_Config(9000000);
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);//72/8=9MHZ
/*使用堆栈指针,非特权级状态*/
__set_CONTROL(0x3);
/*改变CONTROL后执行ISB(architecturalrecommendation)*/
__ISB();
/*启动任务0*/
task0();
//LED0=0;
while(1);
}
__asmvoidPendSV_Handler(void)
{
//保存当前任务的寄存器内容
MRSR0,PSP//得到PSPR0=PSP
//xPSR,PC,LR,R12,R0-R3已自动保存
STMDBR0!,{R4-R11}//保存R4-R11共8个寄存器得到当前任务堆栈
//加载下一个任务的内容
LDRR1,=__cpp(&curr_task)
LDRR3,=__cpp(&PSP_array)
LDRR4,=__cpp(&next_task)
LDRR4,[R4]//得到下一个任务的ID
STRR4,[R1]//设置curr_task=next_task
LDRR0,[R3,R4,LSL#2]//从PSP_array中获取PSP的值
LDMIAR0!,{R4-R11}//将任务堆栈中的数值加载到R4-R11中
//ADDSR0,R0,#0x20
MSRPSP,R0//设置PSP指向此任务
//ORRLR,LR,#0x04
BXLR//返回
//xPSR,PC,LR,R12,R0-R3会自动的恢复
ALIGN4
}
voidSysTick_Handler(void)
{
flag=~flag;
LED0=flag;
if(curr_task==0)
next_task=1;
else
next_task=0;
TriggerPendSV();
}
voidUSART1_Init(void)
{
GPIO_InitTypeDefGPIO_InitStructure;
USART_InitTypeDefUSART_InitStructure;
/*configUSART1clock*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE);
/*USART1GPIOconfig*/
/*ConfigureUSART1Tx(PA.09)asalternatefunctionpush-pull*/
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
/*ConfigureUSART1Rx(PA.10)asinputfloating*/
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStructure);
/*USART1modeconfig*/
USART_InitStructure.USART_BaudRate=9600;
USART_InitStructure.USART_WordLength=USART_WordLength_8b;
USART_InitStructure.USART_StopBits=USART_StopBits_1;
USART_InitStructure.USART_Parity=USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;
USART_Init(USART1,&USART_InitStructure);
USART_Cmd(USART1,ENABLE);
}
intfputc(intch,FILE*f)
{
USART_SendData(USART1,(unsignedchar)ch);
while(!(USART1->SR&USART_FLAG_TXE));
return(ch);
}
测试后结果如图:
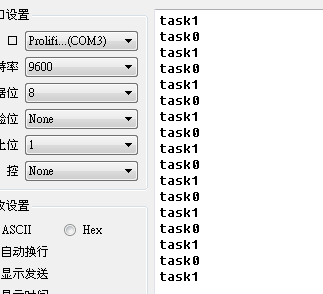
可以看出,两个任务可以切换了。
上述代码参考《cortex-M3权威指南》和《安富莱_STM32-V5开发板_μCOS-III教程》得来。
审核编辑 :李倩
-
led
+关注
关注
243文章
24444浏览量
687539 -
程序
+关注
关注
117文章
3836浏览量
84767
原文标题:例说OS前的任务切换(附代码)
文章出处:【微信号:技术让梦想更伟大,微信公众号:技术让梦想更伟大】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
电能质量在线监测装置的暂态数据补传的优先级如何在实际应用中进行动态调整?
电能质量在线监测装置的暂态数据补传的优先级是怎样的?
FreeRTOS任务调度及优先级问题
低优先级线程无法调度怎么解决?
什么是RTOS中的优先级反转
求助,关于MS51设置中断优先级问题求解
揭秘!基于RT-Thread探究“优先级反转”下的任务调度究竟是什么样的?| 技术集结






 工商网监
工商网监
评论