 取消超声波传感器,Tesla Vision终于完满了吗?
取消超声波传感器,Tesla Vision终于完满了吗?

Tesla宣布取消USS=Ultra-Sonic Sensor低速状态下超声波感知子系统的传言,在圈儿内是发生在2022年年中时期的,互联网上关于Tesla终于要挥刀向USS的传言此起彼伏。九月份的CVPR2022上,Ashok做了关于基于纯视觉的Occupancy Network的技术报告之后,这种传言似乎得到了某种加强。而在随后的Tesla AI Day 2022开放日活动上,Occupancy Network如何落地得到了进一步解释。关注Tesla取消USS技术传闻的业内人士已经明显可以看到,Occupancy Network神经网络技术所体现出来的Geo位置属性高于Ontology物质类别属性的识别能力,对于能否满足低速、复杂地貌下的泊车需求,几乎就是针尖儿对麦芒了……
AI Day的3天后,靴子落地。10月4日Tesla官网宣布,Tesla将率先在Model 3和Model Y车型2023款上取消全部十二个USS传感器, Tesla Vision至少从配置上,趋近完满……
被放弃的USS到底是什么?
谈到车载传感器,国内汽车行业已经卷到一个相当的程度,有些实现商业量产的车辆,能达到一辆车上配置40颗左右的传感器,并以此为强大的商业卖点,实在是让小编有点叹为观止。其中的超声波雷达是汽车中最为常见的一种传感器。它是通过反射超声波装置实现发射超声波,并接受回来的反射波后,测算车辆本体距离反射体的距离。时至今日,现代车辆的周边传感器已经是武装到牙齿了,从传感器类别看,超声波只是其中之一。
相对于其它常见的传感器大类:毫米波雷达、激光雷达和摄像头来看,超声波雷达有其特殊性:它并非是以电磁波的形式来辐射测量信号的,而是声波-Voice Wave。而二者之间有着本质的不同。所以,一般的技术读者有时候会忽视这个关键的前置条件,小编这里特意强调一下:声波在空气中的声速只有340m/s,相对于电磁波的光速300000000m/s,是一个非常低的速度指标。所以当我们看到主流的车载超声波传感器工作频率在40KHz的时候,不要想当然地把它归为电磁波机制下的长波超长波系统。
注:声速下,以40KHz的超声波雷达为例,其工作波长大约是340m/40,000Hz=8.5mm。在这个波长尺度上的超声波系统,理论上可以以毫米mm的精度级别对障碍物(回波体)进行测距。虽然波长也在mm毫米级别,但超声波系统和基于电磁波机制的雷达(小编:多数毫米波雷达工作在30GHz-300GHz之间,波长在1mm-10mm之间,也属于毫米波系统)还是有着本质的区别。小编自己没有亲自尝试过,但一些消费者视频显示,超声波雷达在工作时,其圆形的震动薄膜机构是有明显的手触感的,但车头的毫米波雷达和激光雷达(纳米波)显然不会给你这种体感感觉。
上图1显示的是一个标准的超声波雷达组件,不含配套连接线缆。非正式消息显示Valeo的超声波雷达技术是Tesla的原始组件供货商,外观上确实很像。而且ebay.com上也提供法雷奥的超声波雷达组件给Tesla车主,提供车主DIY修复超声波配件的选择。要知道这个单个雷达组件在ebay.com的公开售价也只有40美金(小编:成本大约是8美金一个,不包含配套线缆和安装件)。而按照Tesla车辆惯常的维修体系,能换则换的原则,连同Bumper挡板,报价至少1000美金。

图二【Tesla Ultrasonic and vision-2.png】来自Teslamotorsclub.com插图节选,取自URL:https://teslamotorsclub.com/tmc/threads/experience-with-ultrasonic-sensor-repairs.168522/;
上图2所显示的就是事故中局部受损的Model 3前Bumper和殃及的两部超声波雷达。如果前bumper可以重新喷漆处理,那么自己动手更换这两部超声波雷达显然是普通人车主更好的选择。下图3所显示的是一个从红色Model 3车身上拆下来的超声波雷达,上表面为红色涂装,是为了适配红色车身。现在不清楚的是,一部车上共12部超声波雷达在性能上是否有所区分,但颜色上的区分和具体的产品代号是联系到一起的,共5种5个颜色。跨越车型Model 3 Y X S不会有所区别。
下图4显示了在Bumper背部(里侧)的超声波雷达安装方式和连接线缆的局部细节图。

图四【Tesla Ultrasonic and vision-4.png】来自youtube.com上频道Munro Live的视频截图,取自URL:https://www.youtube.com/watch?v=LS3Vk0NPFDE;
超声波雷达主要用在自动泊车和停车辅助场景上,分类的话可以分为APA和UPA两种。
* APA超声波雷达,全称Automatic Parking Assistance,是安装在汽车前后两侧的侧面,一共四个,主要是是用来检测障碍物的距离。它的探测距离一般是在30-500cm内,不过由于频率低(参考频率为48KHz),精度一般;
APA的主要目标还是用于在较大的范围内,比如5m左右可以发现可用车位。虽然APA的精度一般,但一个是足够使用,另一个是其声波波束指向性较好,且不容易对其它UPA产生干扰,可以同时工作;
* UPA超声波雷达,全称Ultrasonic Parking Assistance,是安装在前后保险杠上,前后各有4个,一共八个,主要用于测量与前后方向障碍物的距离,其探测距离15-250cm内,但是频率就比较高了(参考频率为55KHz),波长短则精度就高;
UPA是提供当车辆进入目标空车位时,对于前后左右障碍物和车辆的距离测量,从而可以在车辆前进和后退的方向上,构成高精度的识别结果,甚至可以某种程度勾勒障碍物的大致形状。
从上图3和图4的细节展示来看,从超声波雷达单元的外观上,较难发现Tesla是否采用了APA和UPA的差异化部署,从超声波雷达的安装位置上看,大概率是,但没有证据。Ultrasonic的APA和UPA的工作协调性,可以参考如下视频:
Autopilot系统对于USS超声波的呈现
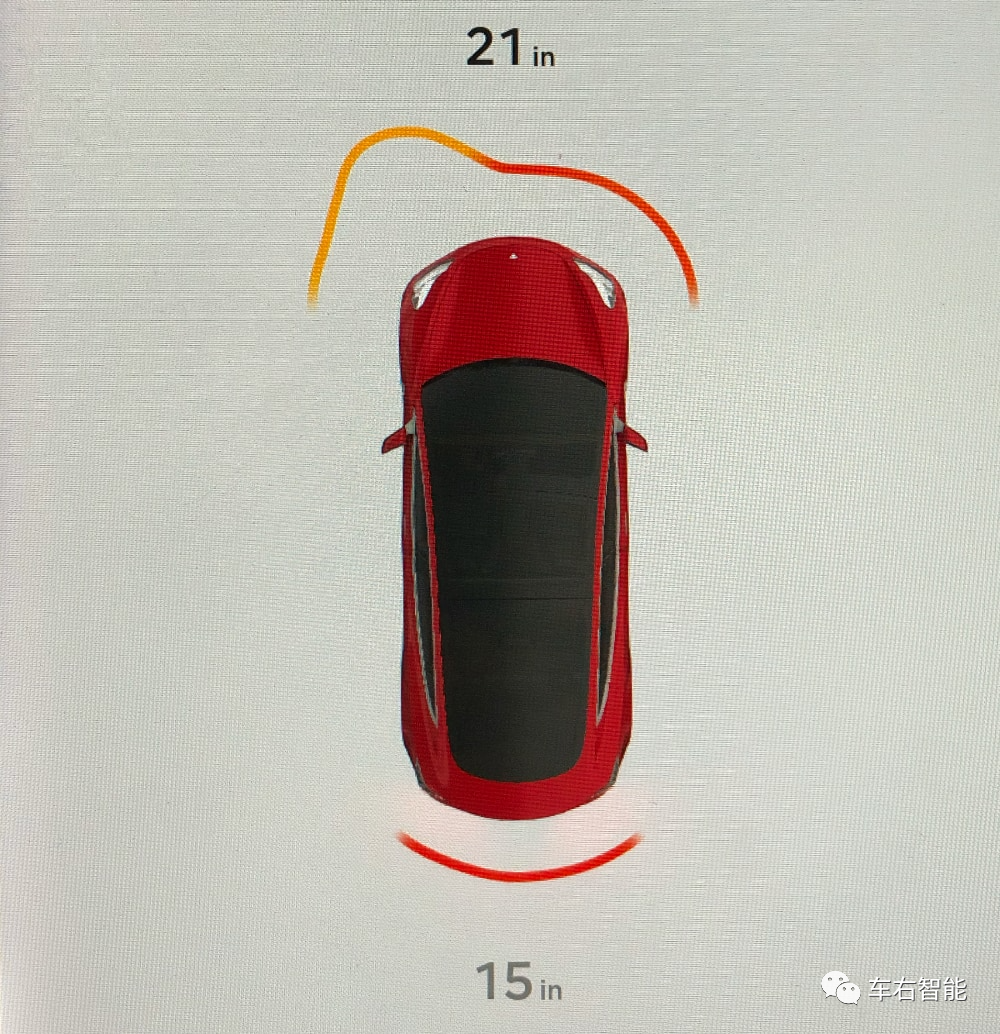
在Autopilot系统当中,泊车场景下可以提供完美的泊车效果显示。在从地平面起的1.5m-2m高度,前后从车头bumper和车尾bumper起的2.5m的立体范围以内,只要这个12个USS正常工作,就没有感知死角。在有家庭车库的条件下,这种精确到十厘米级别(inch英寸级别)的感知,可以带给车主足够的泊车安全感。
图六【Tesla Ultrasonic and vision-6.png】来自notateslaapp..com的技术文章插图截图,取自URL:https://www.notateslaapp.com/software-updates/upcoming-features/id/567/tesla-to-improve-parking-chimes-with-directional-sound;
上图6展示出了Tesla的UPA(前后各4个)超声波雷达,所能勾勒出的细致的模拟车位空间限位俯视图。其中头部最近距离为21in/53cm,车尾部最近距离为15in/38cm,进入红色告警状态。其中的头部限位空间在左上角呈现出宽松的测量结果,然后被拟合成一根复合的曲线,有句刚句,美学上看这个动画呈现直观、表达真实性和可视化(动画效果)都做得很好。
在车辆的行驶场景中,目前没有明确的线索显示Ultrasonic超声波感知机制是否直接参与Autopilot框架下的各种自动化操作,比如车道保持LKA等典型的Level-2操作等。但从过往持续对于Autopilot版本升级时的各种测试视频来看,USS超声波雷达其中的APA—位于前后左右四个侧向角度的长程超声波雷达会在高速行驶过程中,持续工作并至少在Autopilot车内中控UI上显示检测反馈,如下图:

图七【Tesla Ultrasonic and vision-7.png】来自teslamotorsclub.com的技术问答插图截图,取自URL:https://teslamotorsclub.com/tmc/threads/yellow-arc-line-meaning.220361/;
在车辆行驶状态下,5米范围内路边的各种障碍物超声回波,将会导致探测结果显示在Autopilot的中控屏幕上:当距离较远时为灰色弧线,距离中等时为黄色弧线,距离靠近时为红色弧线。上图6显示道路旁的一般性障碍物,类似较高的隔离栏、路边的垃圾桶和各种杂草和树木,都会引发超声波回波。
Autopilot系统对于USS超声波的利用
根据另外一些来自消费者的非正式消息,早期当Tesla车辆上的USS超声波传感器故障(遭遇车祸部分失效)的前提下,Autopilot的车道偏离辅助功能/Lane Departureassist因持续告警而无法使用,系统提示必须人类司机接管。但从Tesla本次取消USS传感器所发布的官方声明来看,除了泊车所涉及的具体功能之外,例如summon和auto park,一切Autopilot和Security,甚至FSD的功能都不受限制,如下:
图八【Tesla Ultrasonic and vision-8.png】来自tesla.com官方网站的信息发布截图,取自URL:https://www.tesla.com/support/transitioning-tesla-vision;
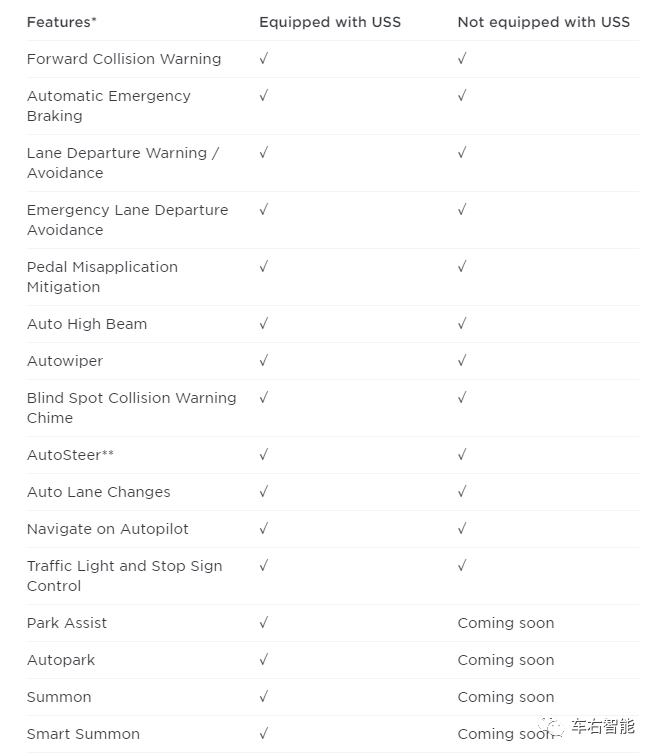
上图8可以看到第三行中,Lane Departure Warning/Avoidance功能并不和USS超声波传感感知能力挂钩,并且除了最后四项和Park泊车直接相关的功能受到取消USS的影响之外,所有的Autopilot和FSD的功能都已经和USS感知能力脱钩。Tesla Vision自从一年半前取消mmRadar之后,确实已经在正常的道路行驶过程中,转向完全依赖Tesla Vision能力了。
与此形成鲜明对照的是,我们看到除Tesla之外的其它辅助驾驶系统和自动驾驶系统功能提供商眼中,USS因为其高精度测量能力和低成本而令其重要性与日俱增,早已不是最早引用USS上车时侯仅用于倒车环境的“倒车雷达”了。在AEB自动紧急制动功能、FCW前方碰撞预警功能、LCA变道辅助系统和ACC自适应续航控制系统的应用场景中,USS提供感知结果。
南辕北辙。
放弃USS给Tesla带来的收益
Youtube上有一个长期研究Tesla车辆结构和成本的机械博主,@Muro Live,通过他(Mike Lane)的计算:Tesla的每辆车都有12个USS,估计成本为8美元,总计96美元。用于零件和安装的热铆支架每个估计0.15美元,总计1.80美元。仪表板线传感器线束估计每个花费2.20美元,两个总计4.40美元。对于内部的接线连接器,Tesla使用了两个,每个估计成本为0.40美元,总计0.80美元。他还为仪表板和车身线束使用布线和连接器,估计价格为0.50美元,总计1美元。Tesla还使用了两个集成电路,估计每个成本为5美元。
以上求和,每辆车的总金额为114美元。
如果我们按照明年起Tesla的年出货量可以达到200万台来估算,仅放弃USS传感器一项,Tesla一年就可以节省2.3亿美金!这笔钱如果用于雇佣Vision Technology工程师,以年薪50万美金计,可以请456位高手。
Occupancy Network能否提供低速高精度测量
10月份取消USS的官方消息发布以来,小编看到了Tesla历史上最大的争议,来自于Tesla车主和汽车技术的从业者、爱好者。上次两年前取消mmRadar的时候,没有这么多的争议。
著名的Tesla黑客@Green说,新发布并开始推送的Tesla2022.40.4软件版本中,对于那些没有装备USS的2023新款Model 3和Y,Tesla将会尝试使用Autopilot中的Vision技术来提供泊车场景中所需要的障碍物距离测量。但截至目前我们看到各种客户上报的2022.40.4的测试视频中显示,2023新款Model 3和Y在泊车场景中,系统中控UI没有提供前后障碍物的距离信息。消费者的争议必然将长期存在,直到Tesla真正可以实现用Tesla Vision技术完整替代USS,并保证拥有足够的测量精度(inch级别)。任何人类司机都可以想象,在拥挤的慢速行驶场景中,在复杂的停车场障碍物丛生的状态下,在狭窄路面的掉头操作中,人类司机如果无法掌控位于车头和车位的障碍物信息,将会是一件多么讽刺的技术倒退。
理论上唯一的技术指望是OccupancyNetwork。
图九【Tesla ultrasonic and vision-9.png】来自Tesla AI Day2022视频节选(B站搬运),取自URL:https://www.bilibili.com/video/BV1Jt4y1w71g/?spm_id_from=333.337.search-card.all.click&vd_source=63bc5d16d5cce41ceadd0a0baf84eefc ;
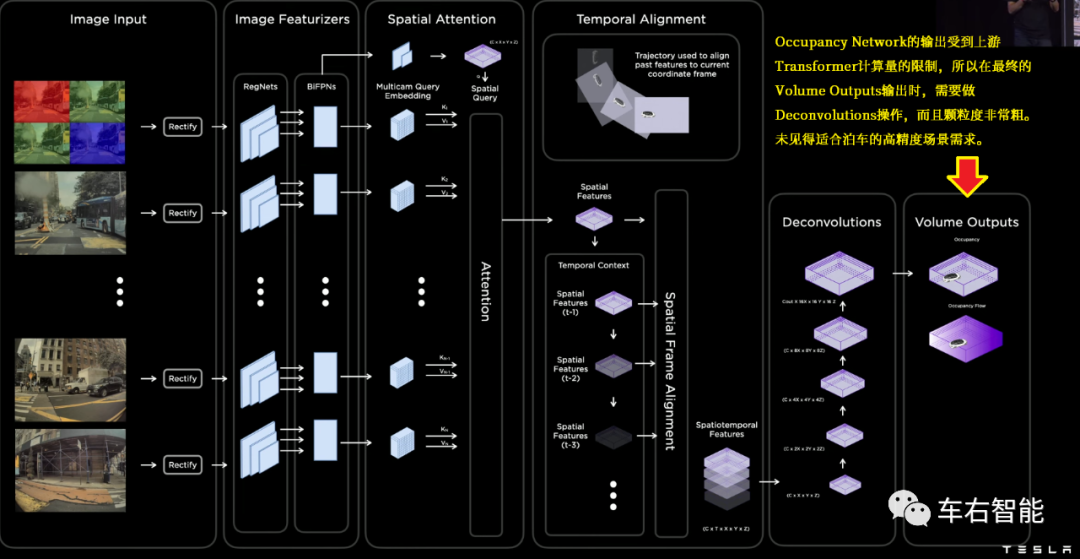
关于OccupancyNetwork的技术解读已经汗牛充栋了,小编就不罗嗦了。我们只关注视觉技术是否真的能够提供足够高精度的低速场景定位,从而具备替代USS的可能性。参考上图9,是在AI Day2022上较为完整的Occupancy Network的结构,基本可以理解为在ResNet提取图像特征feature之后,Transformer将依据不同级别的特征图来实现BEV转换,并且这个转换是在3D空间内进行查询的,所以我们可以得到一个定义好Voxel尺寸(即单元voxel体素尺寸)的3D BEV——如果这个3D Voxel的BEV输出再联系上时间尺度,就是一个流动的3D Voxel场,参见上图中的Volume Outputs。
框架OccupancyNetwork的核心要义还是TransformerNetwork,它利用注意力机制发现在8个摄像头投影视场中的feature之间的关系,并最终将这种关系以最低损失转移到BEV俯视图,或者Occupancy Network所需要的3D场。这里需要考虑的是,Transformer虽然性能一流,但是计算量会非常大。这是提前定义Voxel体素尺寸的主要原因——牺牲分辨率,提高实时性。这也是一种性能和算力之间的平衡,够用就好。
但当Tesla将Occupancy Networks应用到停车、泊车、错车、掉头等对于操控精度要求很高的低速场景时,因为同时面对低速度和高精度的需求,那么就需要在现有Voxel的精度上再进一步,以便达到很多场合下估算碰撞尺度的inch英寸精度。

图十【Tesla ultrasonic and vision-11.png】来自twitter账户@Jasonfenske13的推文,取自URL:https://twitter.com/jasonfenske13/status/1586084382733135874/photo/1;
上图10显示,Model 3倒车入库,由于雨水浇湿了后视摄像头,导致视觉倒车影像模糊,但因为Model 3配备USS,从而可以精准估计车尾距离车库墙壁的距离。

图十一【Tesla ultrasonic and vision-12.png】来自ebay商家贩售Ultrasonic Parking Sensor的广告截图,取自URL:https://www.ebay.ie/itm/STRIKER-Ultrasonic-Parking-Sensor-for-Home-Garage-Car-Carport-Storage-Shed-/282109121887;
因为家庭车库往往尺寸有限,对于车辆长度的警示在老款车辆上(没有前向USS传感器)的解决方案是外挂墙壁市的超声波传感器,最低距离可以达到6inch,提供给驾驶员视觉警示信号。由此可见不论是正向还是反向倒车进入车库,都需要高精度的测距工具。Tesla Vision为基础的Occupancy Network的解决方案是如何的呢?
图十二【Tesla ultrasonic and vision-10.png】来自Tesla AI Day2022视频节选(B站搬运),取自URL:https://www.bilibili.com/video/BV1Jt4y1w71g/?spm_id_from=333.337.search-card.all.click&vd_source=63bc5d16d5cce41ceadd0a0baf84eefc ;
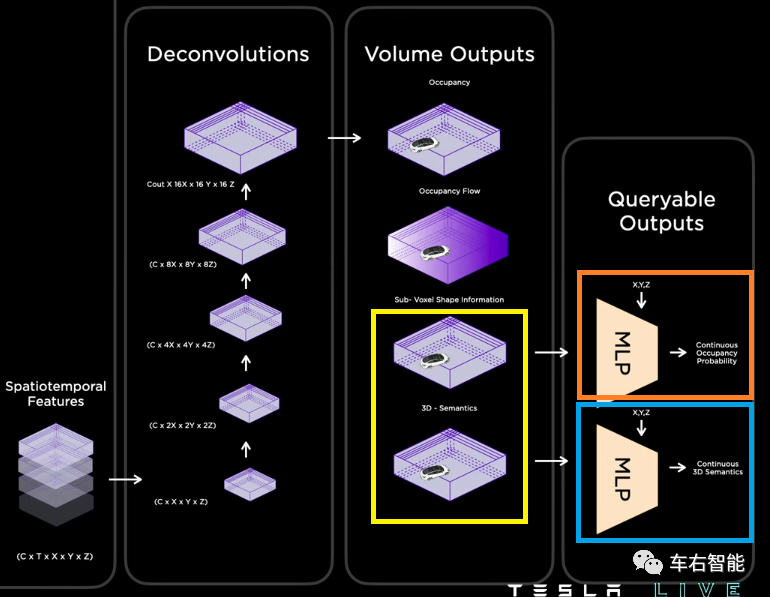
上图12是在今年AI Day上那位华人小哥(Phil Duan)所介绍的,是图9的后续细节的进一步阐释,专门针对OccupancyNetworks精度不够的场景。Phil的现场阐述很简单,一句话带过,“Occupancy输出流是有固定尺寸的Voxel立方体网格组成的,在一些控制和规划的场景下,这个固定尺寸Voxel构成的外部环境可能在精度上无法满足使用要求。为了获取更高精度的Occupancy输出格式,我们需要针对每个感兴趣的Output上的Voxel进行进一步的处理,将其输入到MLP多层感知机上,然后在更细的颗粒度上查询Voxel内部的细节,从而了解其精确的位置和语义信息。”我们在图12中就可以看到两个各自独立的MLP会对Occupancy的Output进行更细的占用probability查询(确定在更细的位置上是否有物体存在),同时对占用的部分进行更细的语义分类。
我们可以大致可以推测如下场景:当车辆进入狭窄车库并逐渐贴近后墙壁时,后墙上存在一个小尺寸的车辆充电器机械挂钩。在一定距离下,摄像头所捕获的标准尺寸的Occupancy Voxel下被处理为一个大立方体(小编:意味着这个立方体Voxel内部整体完全被占用的可能性很高)从而阻止车辆进一步靠近墙壁合理利用有限空间。但如果车辆本体此时运动速度很低,车辆就有足够的算力去进一步计算这个大立方体Voxel内部细节到底是什么——通过随着摄像头传感器的不断对于障碍物的抵近观察,Voxel的细节也会越来越丰富,从而有可能展示哪些真的有不可碰撞的障碍物实体,哪些观察到的Voxel粗颗粒度,在更细的细节上实际是空白区域可以让车辆进一步抵近墙壁。
所以除了Tesla车辆所固有的前向摄像头观测死角问题,Voxel的观测颗粒度问题是另外一个在泊车场景下所必须解决的问题。AI Day上Phil讲Occupancy Networks的时效性为10ms,意味着1s提供100帧Occupancy Flow。假设在更高精度上的Occupancy不会导致时效性大幅度下降,Tesla Vision确实有具备完整替代Ultrasonics的潜力。
果断拆除USS是个好方法吗?
Tesla历来特立独行,这是产品属性(小编:已经不是严格传统意义上的车辆产品了)和公司属性(小编:尤其创始人属性)所共同决定的。截止目前看,市场的总反馈是积极的,不论是消费市场还是资本市场,但也有杂音。
快速在指定型号更新周期——Tesla2023款上,拆除一个必要的传感器,确实是惊人之举。为啥说是“必要的”传感器呢?因为即便Tesla自己,也不能立刻提供替代USS传感器的Vision能力,而是让客户等待后续软件升级。这种操作相当于突然在产品演进过程中开了局部倒车,潜台词是,“相信我,未来总会把功能给你补上,现在请接受一个减配版本吧!”(小编:注意,这还特别是一个关键的传感器,在某些场景下这种能力具备不可替代性)
迄今为止,小编所观察到的市场反馈一如既往:大家都骂,然后大家继续买。所以,从Tesla的角度来看,这是个好方法吗?!
==卷尾语===================
审核编辑 :李倩
-
传感器
+关注
关注
2578文章
55875浏览量
795699 -
Tesla
+关注
关注
0文章
130浏览量
16511 -
USS
+关注
关注
1文章
20浏览量
11728
原文标题:闷头走到黑,Tesla与全世界逆行—— 取消超声波传感器,Tesla Vision终于完满了吗?
文章出处:【微信号:阿宝1990,微信公众号:阿宝1990】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
超声波液位传感器在发酵罐液位检测中的应用
超声波液位传感器在酒业仓储液位监测中的应用-锦锋科技
2026 SENSOR+TEST精彩预告 | 奥迪威将现场展出超声波流量传感器

原理、材质、抗干扰、成本:超声波与涡流单双张传感器终极对比

超声波压力传感器:精准感知,开启智能监测新时代

为什么超声波传感器不能直接显示氧气浓度?

哪些因素影响超声波传感器检测范围与精度
ICU-30201:超远距离超声波飞行时间测距传感器的卓越之选
什么是超声波原理的液位传感器?

超声波传感器线圈:自动驾驶实现精确实时近距离感知的关键
开放式超声波传感器:开启智能感知新纪元

无线超声波测距传感器:精准感知,开启智能测距新时代
高频超声波传感器:科技浪潮中的“隐形守护者”

微型超声波传感器:小身躯里的探测革命,开启智能感知新维度




评论