 【DFRobot Beetle ESP32-C3开发板试用体验】BNO055陀螺仪
【DFRobot Beetle ESP32-C3开发板试用体验】BNO055陀螺仪

本文来源电子发烧友社区,作者:superjiulong, 帖子地址:https://bbs.elecfans.com/jishu_2296773_1_1.html
1 前言
2 什么是陀螺仪、加速度传感器、地磁传感器2.1 加速度计是什么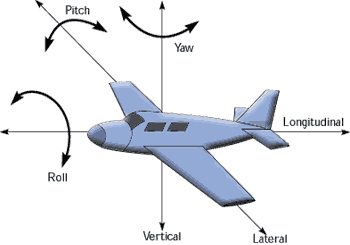
2.3 地磁传感器是什么
3 硬件接线图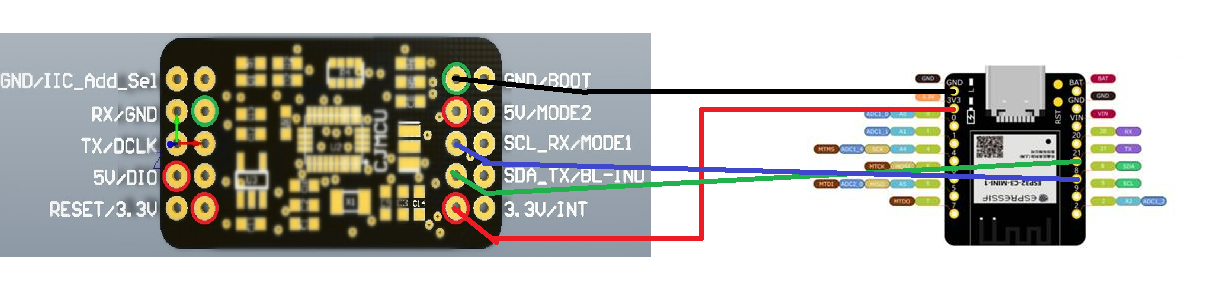
4 程序编写及调试4.1 下载bno055的库】
4.2 安装库
4.3 测试代码
复制代码
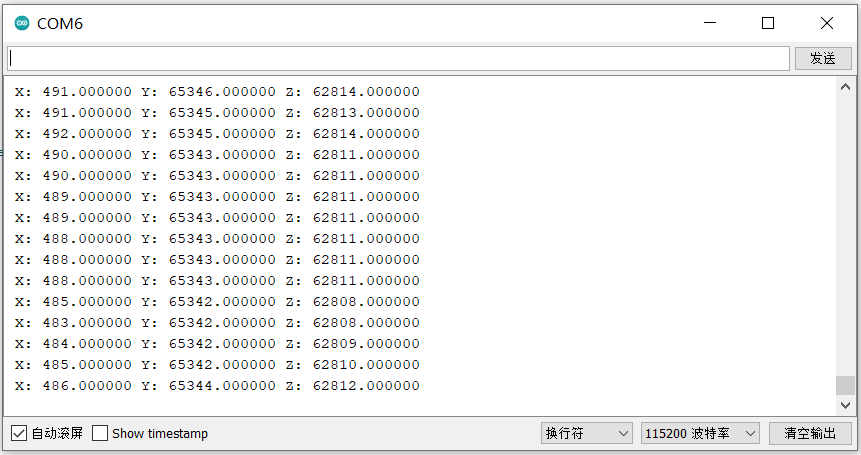
5 结果演示
1 前言
BNO055是博世ASSNs展品系列的新产品,是一款性能优越的IUM芯片,数据输出类型多,可根据需要选择读取不同的IMU融合数据。也是一款系统级封装(SiP)解决方案,集成了一个三轴14位加速度计,一个三轴16位陀螺仪,一个三轴地磁传感器和一个32位Cortex M0+微控制器。
其封装尺寸只有3.8 x 5.2 x 1.13mm³,明显小于可比较的同级解决方案。
技术参数如下:
BNO055加速度:
加速度:±2g/±4g/±8g/±16
低通滤波频段:1kHz~<8Hz
工作模式:正常、睡眠、低功耗、待机、深度睡
BNO055陀螺仪:
加速度:±2g/±4g/±8g/±16
低通滤波频段:1kHz~<8Hz
工作模式:正常、睡眠、低功耗、待机、深度睡
BNO055陀螺仪:
范围:±125°/s~2000°/s
低通滤波频段:523Hz~12Hz
工作模式:正常,快速启动、深度睡眠、睡眠、高级省电
芯片中断控制:运动触发中断信号
BNO055地磁:
范围:±1300uT(x-,y-axis);±2500uT(z-axis)
地磁分辨率:~0.3
工作模式:低功耗、定期、增强定期、高精度
工作模式:正常、睡眠、强制
2 什么是陀螺仪、加速度传感器、地磁传感器2.1 加速度计是什么
加速度计 (accelerometer) 测量加速度的仪表。加速度测量是工程技术提出的重要课题。当物体具有很大的加速度时,物体及其所载的仪器设备和其他无相对加速度的物体均受到能产生同样大的加速度的力,即受到动载荷。欲知动载荷就要测出加速度。其次,要知道各瞬时飞机、火箭和舰艇所在的空间位置,可通过惯性导航(见陀螺平台惯性导航系统)连续地测出其加速度,然后经过积分运算得到速度分量,再次积分得到一个方向的位置坐标信号,而三个坐标方向的仪器测量结果就综合出运动曲线并给出每瞬时航行器所在的空间位置。再如某些控制系统中,常需要加速度信号作为产生控制作用所需的信息的一部分,这里也出现连续地测量加速度的问题。能连续地给出加速度信号的装置称为加速度传感器。
2.2 陀螺仪是什么
陀螺仪是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置。利用其他原理制成的角运动检测装置起同样功能的也称陀螺仪。
在解释陀螺仪的工作原理之前,我先介绍一些转动的术语。在飞行器的航行中,进行XYZ三个方向旋转的旋转有专业的术语,见下图:
沿着机身右方轴(Unity中的+X)进行旋转,称为pitch,中文叫俯仰。
沿着机头上方轴(Unity中的+Y)进行旋转,称为Yaw,中文叫偏航。
沿着机头前方轴(Unity中的+Z)进行旋转,称为Roll,中文叫桶滚。
我把三个Gimbal环用不同的颜色做了标记,底部三个轴向,RGB分别对应XYZ。
2.3 地磁传感器是什么
地磁场是地球的固有资源,为航空、航天、航海提供了天然的坐标系,可应用于航天器或舰船的定位定向及姿态控制。利用地球磁场空间分布的磁导航技术简便高效、性能可靠、抗干扰,是发达国家不可缺少的基本导航定位手段之一,如自动化程度很高的波音飞机都装载有磁导航定位系统。
陀螺仪是利用陀螺的定轴性和进动性,可以测量姿态(利用定轴性)和寻北(利用进动性)的仪器;短时间精度高,长时间工作时存在累积误差。地磁场传感器是可以测量地球磁场,在不受磁干扰的情况下,如果知道当地的经纬度和海拔,就可以在测量地磁场方向后,利用各种地球磁场模型计算磁倾角、磁偏角,然后就可以算出极北和姿态等。磁场传感器容易受干扰,但是简单不容易坏。
3 硬件接线图
4 程序编写及调试4.1 下载bno055的库】
注意:此处需要下载您手头购买的模块相应的库文件,此处使用的是DFRobot的做演示用。
https://github.com/DFRobot/DFRobot_BNO055
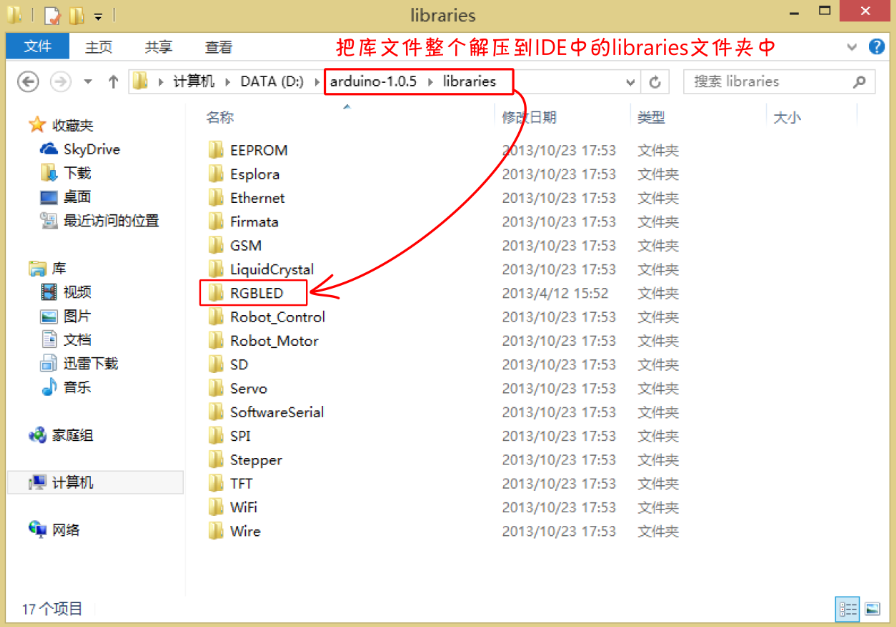
4.2 安装库
先把库文件从网站上下载下来,整个压缩包解压到Arduino IDE的libraries文件夹中。
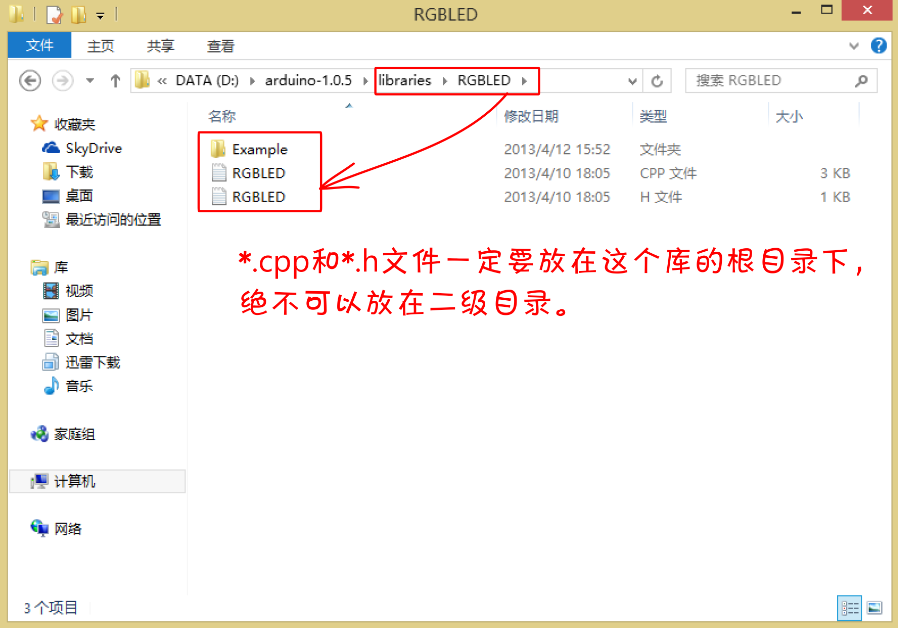
需要注意的是,库文件夹下要直接显示*.cpp和*.h文件,绝对不可以把这些库文件再套到二级以上目录,这样子就会导致IDE无法识别。
4.3 测试代码
- /***************************************************
- Thisis an example for the BNO055
- ****************************************************/
- #include
- #include
- BNO055 imu;
- void setup()
- {
- Serial.begin(115200);
- if(!imu.begin(imu.NDOF, imu.NORMAL_MODE )){
- Serial.println("unable to initialize the chip, or it isnt ready.I'll give it a sec and try anyway!");
- delay(30);
- }
- delay(1000);
- imu.getInfo();
- Serial.print("status code:");Serial.println(imu.SystemStatusCode);
- Serial.print("Selftest results:");Serial.println(imu.SelfTestStatus);
- Serial.print("System Error code:");Serial.println(imu.SystemError);
- }
- void loop()
- {
- imu.readEuler();
- Serial.print("X: "); Serial.print((float)imu.EulerData.x,6); Serial.print(" ");
- Serial.print("Y: ");Serial.print((float)imu.EulerData.y,6);Serial.print(" ");
- Serial.print("Z: "); Serial.println((float)imu.EulerData.z,6);Serial.print(" ");
- delay(100);
- }
可以打印出陀螺仪的三轴数据
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ESP32
+关注
关注
27文章
1226浏览量
22394 -
DFRobot
+关注
关注
4文章
1165浏览量
12728
发布评论请先 登录
相关推荐
热点推荐
ESP32/ESP8266开发板单向多对一ESP-NOW无线通信
本实验通过ESP-NOW无线通信协议实现多个ESP32/ESP 8266开发板向ESP32开发板

ESP32开发板单向点对点ESP-NOW无线通信
本例程通过两个ESP32开发板实现单向点对点ESP-NOW无线通信,一个ESP32开发板作为Sender发送方,另一个

ESP32/ESP8266开发板单向一对多ESP-NOW无线通信
通过ESP-NOW无线通信协议实现ESP32开发板向多个ESP32/ESP 8266开发板发送数

【ESP32-C61】WT9932C61-TINY开发板上手指南
1开发板介绍WT9932C61‑TINY是一款专为轻量化物联网开发设计的迷你开发板,核心基于乐鑫ESP32‑

【ESP32-C3】WT9932C3-TINY开发板上手指南
简介1开发板介绍WT9932C3-TINY是一款专为轻量化物联网开发设计的迷你开发板,核心基于乐鑫ESP32-C3芯片,搭载启明云端WT01
【ESP32-C5系列】WT9932C5-TINY开发板上手指南
简介1开发板介绍WT9932C5-TINY是一款专为轻量化物联网开发设计的迷你开发板,核心基于乐鑫ESP32-C5芯片,搭载启明云端WT01
【ESP32-C3】WT9932C3-TINY开发板规格书
开发板简介1开发板介绍WT9932C3-TINY是一款专为轻量化物联网开发设计的迷你开发板,核心基于乐鑫
【ESP32-C61】WT9932C61-TINY开发板规格书
开发板介绍WT9932C61‑TINY是一款专为轻量化物联网开发设计的迷你开发板,核心基于乐鑫ESP32‑
【ESP32-C5系列】WT9932C5-TINY开发板规格书
1开发板介绍WT9932C5-TINY是一款专为轻量化物联网开发设计的迷你开发板,核心基于乐鑫ESP32-C5芯片,搭载启明云端WT0132
ESP32-C3迷你开发板,支持Wi-Fi+BLE双模,即插即用设计!
如果你正在为智能家居、工业控制或低功耗物联网终端项目寻找一款性能可靠、开发便捷且接口完备的核心模块,不妨直接关注这款WT9932C3-TINY开发板——它基于成熟的乐鑫科技ESP32-C3
ESP32-P4全功能开发板和ESP32-P4-TINY开发板该怎么选?看这篇就够了!
启明云端基于乐鑫科技ESP32-P4芯片设计了多款开发板,这些开发板有什么区别?基于应用场景如何选择?本期,我们聚焦两款代表性产品:WT99P4C5-S1

这块乐鑫科技ESP32-C3开发板太懂开发者了!双无线+全接口,不要太实用
设计之初就瞄准了开发过程中的这些痛点,让你能把更多精力放在创意实现上!性能足够能打,物联网应用无压力搭载乐鑫科技ESP32-C3芯片,采用RISC-V架构,最高主频

ESP32-P4 C5开发板烧录小智全流程!速看!
没错,你没有看错!我们带着WT99P4C5-S1开发板烧录小智全流程走来了!开发板搭载乐鑫科技ESP32-P4和ESP32-C5芯片,代码完
ESP32-C3开发板全面支持小智AI!烧录实战指南来了!
本文将详细解析基于乐鑫ESP32-C3芯片的ZXAIEC43开发板烧录“小智”AI语音系统的全流程。该方案代码完全开源,支持深度定制开发,适用于智能玩具、潮玩手办及智能家居控制等多元场景。开发



评论