 KUKA机器人镜像
KUKA机器人镜像

KUKA机器人镜像
KUKA机器人镜像所需工具:KUKA.Recover U盘
01
设置
将U盘插入电脑,并双击打开KRC_ARCHIVE(KUKA机器人镜像专用U盘)。
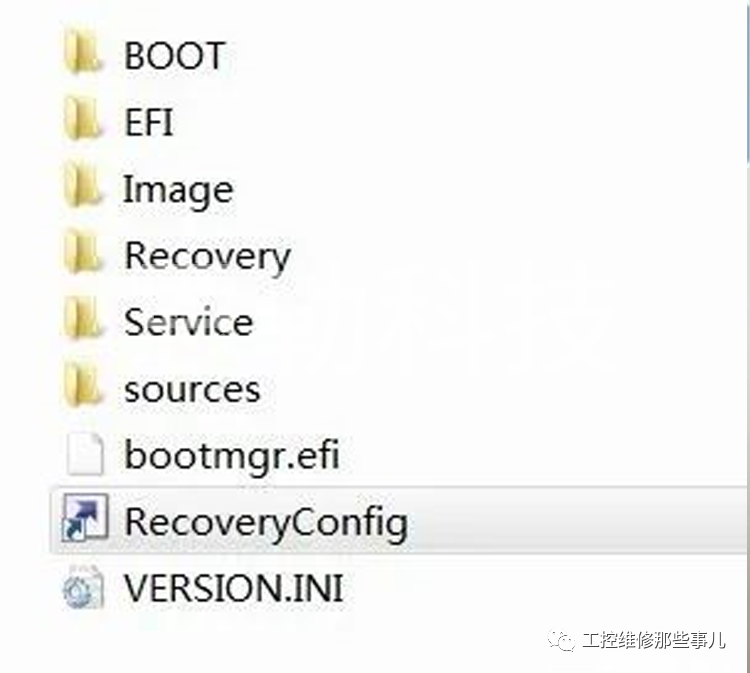
Image文件夹--里面存放镜像压缩文件。建议每次“创建磁盘映像”时检查该文件夹,最好该文件夹不要有镜像文件,避免设置错误,导致将镜像导入机器人。
RecoveryConfig--镜像前设置文件。
02
双击打开RecoveryConfig进入设置

温馨提示:里面有多个使用技巧
语言设置:该页面可设置为多个国家语言
03
点击“Configuration”进入配置页面
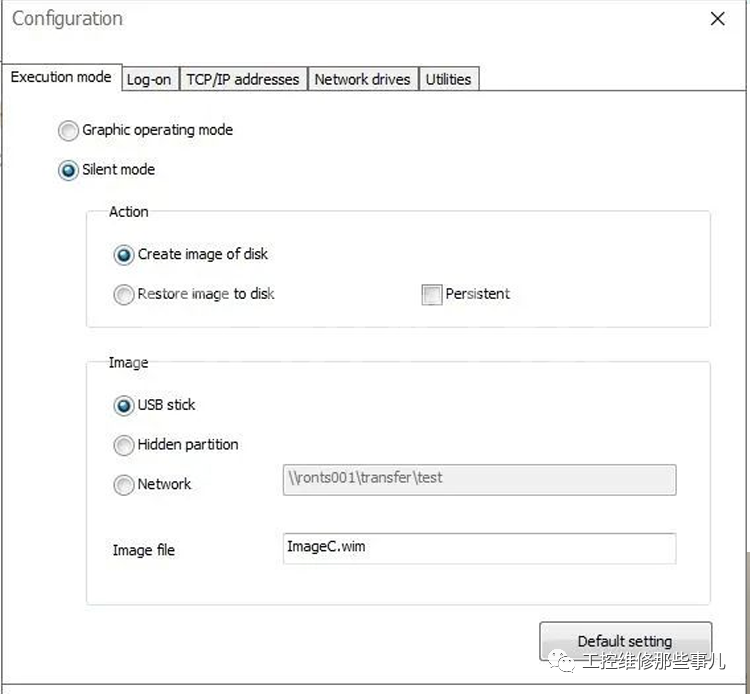
Create image of disk--创建磁盘映像
Restore image of disk--将映像导入磁盘
Persistent--持久性
如图除上述三个选项外,其它选项无需更改
创建磁盘映像:将机器人控制器中的镜像导入U盘。
将映像导入磁盘:将U盘中的镜像导入至机器人控制器。
持久性:默认方式为“创建磁盘映像”,若在“将映像导入磁盘”的选项下勾选该选项则配置一直保持“将映像导入磁盘”方式。
设置完成后点击OK,设置完成后可以拔出U盘。
镜像前需要确认:1.机器人控制器关闭。2.U盘有足够的存储空间。
04
创建磁盘映像
1.将U盘插入控制器
2.机器人开机
3.查看CSP面板指示灯:
指示灯1闪烁∶KUKA.RecoveryUSB 正在启动控制器。
指示灯1亮起∶引导过程已完成。
指示灯2 闪烁∶正在创建C∶V分区的图像。
指示灯2亮起∶C∶分区的图像创建已完成。
指示灯3闪烁∶正在创建D∶V分区的图像。
指示灯3亮起∶D∶分区的图像创建已完成。
指示灯1-6亮起1秒钟∶完整图像已创建。
指示灯2 闪烁∶控制器已关闭进入休眠。
4.关闭Q1(主开关)
5..拔下U盘,“创建磁盘映像”完成
05
将映像导入磁盘
1.将带有镜像文件的U盘插入控制器
2.机器人开机
3.查看CSP面板指示灯:
指示灯1闪烁∶KUKA.RecoveryUSB 正在启动控制器。
指示灯1亮起:引导过程已完成。
指示灯2闪烁∶正在恢复C∶和 D∶V分区的图像。
指示灯2点亮∶已恢复C∶ 和D∶V分区√完成。
指示灯3闪烁∶正在复制C∶和D∶分区的图像到隐藏分区。
指示灯3点亮∶图像复制已完成。
指示灯1-6亮起数秒钟∶完整图像已恢复。
指示灯2 闪烁∶控制器已关闭进入休眠。
4.关闭Q1(主开关)
5..拔下U盘,“将映像导入磁盘”完成
审核编辑 :李倩
-
镜像
+关注
关注
0文章
182浏览量
11719 -
KUKA机器人
+关注
关注
4文章
144浏览量
10122
原文标题:KUKA机器人镜像
文章出处:【微信号:pcb_repaired,微信公众号:工控维修那些事儿】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
人形机器人热度狂飙,工业赛道真正落地的是复合机器人!

基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
NVIDIA 携手全球机器人领导者,将物理 AI 带入现实世界

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
探索RISC-V在机器人领域的潜力
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升

工业机器人的特点
工业机器人与协作机器人概念不同




评论