 ABB高速对位软件主要特点
ABB高速对位软件主要特点

作为RobotWare系列的又一创新补充,ABB最新推出的高速对位软件能够大幅缩短电子产品组装生产节拍,提高客户产能的同时,还能显著提高作业精度。小编下面给大家全面介绍了这款突破性技术,一起来看看吧~
高速对位软件主要特点
1
业内首款可将6轴机器人视觉对位速度提升70%,精度提升50%的机器人软件
2
调试过程简单:大大缩短了系统集成商和制造商的部署时间,单次部署时间由原本的8小时缩短为1小时
3
高度精密:借助视觉伺服技术与计算机视觉系统,将机器人的运动精度控制在0.01至0.02毫米,适用于高度精密装配产线
4
简单易用:软件配备直观的操作界面,操作者无需大量编程经验即可掌握。
5
兼容性极佳:可与各类摄像头搭配,且适用于OmniCore和IRC 5机器人控制器,可直接在现有设备上进行添加
作为电子组装领域的一项突破性技术,ABB高速对位软件适用于ABB IRB 1100和IRB 120工业机器人(更多机型即将适配),旨在帮助机器人实现作业速度和精度之间实现完美平衡。ABB6轴机器人柔性极高,可在狭小空间内完成各类复杂作业,同时也适用于执行多种精细的放置操作。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31435浏览量
223617 -
软件
+关注
关注
69文章
5357浏览量
91876 -
ABB
+关注
关注
26文章
573浏览量
57374
原文标题:新品解读!ABB全新高速对位软件
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
爱普生RTC实时时钟模块的主要特点
爱普生实时时钟模块(Real-Time Clock Module), 内置晶体振荡器、支持低功耗,并具备多功能系统所需的各种功能,例如唤醒定时器、电源切换和时间戳,同时实现低功耗且高精准的日期与时间管理。
高速运放LT1357:性能特点与应用指南
高速运放LT1357:性能特点与应用指南 在电子工程师的设计工具箱中,高速运算放大器是实现高性能电路的关键组件之一。今天,我们将深入探讨Linear Technology公司的LT1357高速

C语言主要特点
C语言的主要特点有:
1.语言简洁、紧凑,使用方便、灵活 。C语言一共只有32个关键字、9种控制语句,程序书写形式自由,主要用小写字母表示,压缩了一切不必要的成分。C语言比其他许多高级语言简练
发表于 01-05 07:41
大电流发生器有什么主要特点
大电流发生器的主要特点集中在 “大电流输出能力、操作便捷性、安全可靠性、场景适配性” 四大核心维度,满足电气设备耐受电流测试需求。
输出性能稳定
能输出高幅值工频大电流,部分型号可达数千至数万
发表于 11-20 17:30
浅谈高速电机
过传统电机的速度,具有以下主要特点: ü 电机功率密度高,同功率情况下,体积远小于同等功率普通电机,可有效节约原材料。 ü 可与原动机直接连接,取消传统的减速机构,传动效率高,噪音小。 ü 转动惯量小,动态响应快。目前成功
充气式试验变压器的主要特点是什么?
充气式试验变压器的主要特点围绕轻便结构、稳定绝缘、低维护需求展开,尤其适配现场移动测试场景。
1. 便携性突出,适配移动场景
以气体(如 SF₆、干燥空气)替代传统绝缘油,无需厚重油箱。其体积和重量
发表于 11-05 15:01
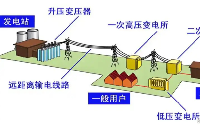
输电线路的作用和主要特点
输电线路是电力系统中不可或缺的重要组成部分,它承担着将电能从发电厂输送到远方的负荷中心以及实现不同电力系统之间互联的关键任务。作为电力传输的载体,输电线路如同人体的血管,将“血液”——电能,源源不断地输送到需要的地方,支撑着现代社会的正常运行。输电线路的核心作用:输送电能输电线路最基本的功能是将发电设施(如火电厂、水电站、风电场或光伏电站等)产生的电能高效、
POSITAL博思特拉绳编码器主要特点与应用
POSITAL博思特拉绳编码器主要特点与应用,拉绳编码器提供高度可靠和精确的测量,这要归功于绝对编码器的准确性以及高质量的拉线机构。即使在 极端条件下,其坚固的结构也能确保可靠的性能和较长的使用寿命

什么是软件网关?有什么功能特点?
大家好,这里是成盈智通,今天给大家介绍一款软网关/软件网关(Vlink软件)。随着物联网和工业自动化快速发展,人们逐渐接触到这个概念,那么什么是软网关/软件网关,它有什么特点和功能?让

LSSD技术简介和主要特点
LSSD (LVDS Source Synchronous Deserialization),是一种用于解决高速LVDS数据接收时钟与数据相位偏移问题的技术。

开关电源芯片U8623的主要特点
恒功率输出模式是一种电源或负载控制策略,其核心目标是在输入条件或负载变化时保持输出功率恒定,常见于对功率稳定性要求较高的应用场景。深圳银联宝开关电源芯片U8623采用恒功率输出、恒温输出模式,采用专用的抖频技术,使得电源系统的电磁兼容性、可靠性能得到极大的发挥!
多模光纤的各类型号的主要特点是什么
多模光纤的常见型号包括OM1、OM2、OM3、OM4和OM5,它们在纤芯直径、带宽、传输距离、光源类型及适用场景等方面存在差异,以下是具体介绍: OM1: 纤芯直径:62.5微米。 带宽:在850nm和1300nm窗口下,带宽较低。 传输距离:支持10Gbps以太网传输距离较短,通常为33米,常用于100Mbps以太网。 光源:通常使用LED光源。 护套颜色:橙色。 OM2: 纤芯直径:50微米。 带宽:在850nm窗口下带宽为500MHz·km。 传输距离:支持10Gbps以太网传输距离为82米,更常用于1Gbps以太
ABB运动控制以创新+高效双轮驱动未来
日前, ABB IEC低压电机全球业务总裁Stefan Floeck出席ABB国际汽联电动方程式世界锦标赛(FE)上海站活动。活动期间,Stefan Floeck就ABB创新科技如何助力中国高质量



评论