 亚信AxRoBot EtherCAT从站机器手臂碰撞防护功能
亚信AxRoBot EtherCAT从站机器手臂碰撞防护功能

介绍亚信电子AX58200 AxRobot EtherCAT从站七轴助力控制机器手臂解决方案的线上碰撞防护功能。
AX58200 AxRobot机器手臂解决方案,利用亚信AX58200 EtherCAT从站马达驱动关节模块化设计,有效地减少每个机器手臂关节中马达驱动板所需占用的空间大小,降低机器手臂关节硬件设计成本。另外,使用EtherCAT菊花链(Daisy-Chain)拓扑连接技术,进行机器手臂关节间的网络通信,可以简单地使用网络线从第一轴关节一直串接到第七轴关节,大大地简化机器手臂关节中内部线路配置的复杂度,从而降低机器手臂设备维护的成本与难度。
一般协作型机器手臂透过装置力量传感器,来获取外界接触力量的资讯,进而实现智能工厂自动化所需的人机协作功能。AxRobot助力控制机器手臂解决方案,无需额外安装价格昂贵的力量传感器,透过内置的马达助力控制器功能,即可侦测外部突发碰撞事件,紧急停止机器手臂的运作并发出错误警报信息,以确保在人与机器协作过程中操作人员的安全。
亚信电子可提供AxRobot EtherCAT七轴助力控制机器手臂开发套件,方便客户进行AxRobot七轴助力控制机器手臂软件控制功能评估。另外,亚信电子可依据客户产品设计的需求,提供AxRobot EtherCAT七轴助力控制机器手臂的开发设计服务。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
亚信电子
+关注
关注
0文章
30浏览量
10880 -
自动化
+关注
关注
31文章
6019浏览量
90851 -
机器手臂
+关注
关注
1文章
20浏览量
11824
发布评论请先 登录
相关推荐
热点推荐
EtherCAT从站开发避坑指南:30分钟搞定ESI XML(上)
将分两期详解EtherCAT从站信息文件ESIXML,介绍其定义、结构及与硬件SII的对应关系,讲解核心节点与PDO过程数据,帮助理解主站识别、配置

一插即用!PCIe/MiniPCIe转EtherCAT从站模块来了
PCIe-ES/MiniPCIe-ESEtherCAT从站模块,支持标准协议与DC同步,硬件解析、低延迟高可靠。可快速扩展工控机、嵌入式设备EtherCAT从
基于先楫6E80的ethercat从站,AL Status Code报001B的错误
基于先楫6E80的ethercat从站,主站是汇川的AC801,在DC模式下(1ms),正常OP运行一段时间后,突然掉线,AL Status Code报001B的错误,这种情况是怎么回
发表于 03-12 14:22
如何使用机器人分析仪EtherCAT-Analyzer抓取主从站数据?
EtherCAT总线在机器人控制总线里占据重要地位。这次,我们搭建了包含EtherCAT主从站和分析仪的完整环境,用机器人分析仪

Modbus从站和Profinet主站“闹别扭”,机械手臂连接困境怎么解?
在智能自动化行业,工程师们常常面临设备通信协议不兼容的难题。今天就来聊聊Modbus从站转Profinet主站连接机械手臂这一颇具创新性的解决方案。 协议特点与连接方式 Modbus协

亚信电子亮相IAS 2025,发布最新工业通信控制芯片与USB PTP时间戳技术
海国家会展中心举行,亚信电子展位号为 6.1H-D160 。 展出亮点一: EtherCAT 与 TSN 芯片,打造高效工业以太网架构 亚信
锐捷网络与亚信安全战略携手,共筑“一站式安全”云桌面新生态
近日,锐捷网络与亚信安全科技股份有限公司(简称:亚信安全)正式签署战略合作协议,共同开启“一站式安全”云桌面解决方案的新篇章,为企业用户的数

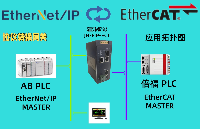
EtherCAT从站转EtherNet/IP主站总线协议转换网关,建议点赞收藏
驱动器、智能仪表、PLC、DCS、FCS等系统。在实际应用中,常存在EtherCAT从站设备与EtherNet/IP主站设备之间需进行数据交互的场景。

EtherNetIP从站转EtherCAT从站协议网关
一,设备主要功能 疆鸿智能JH-EIP-ECT型网关是一款专业的工业协议转换设备,能够高效实现EtherCAT网络与EtherNet/IP网络之间的双向数据通信。该网关支持将EtherCAT从
【米尔NXP i.MX 91开发板评测】移植运行IGH EtherCAT主站
# 加载通用驱动模块
sudo modprobe ec_generic
设置开发板为主站状态
./ethercat master
获取ESC从站配置信息
发表于 09-01 16:32
CAN转EtherCAT:化工行业高效通信的“破局者”
,工程师实现了以下突破:
1. 协议转换零延迟:网关内置双协议栈(EtherCAT从站+CAN主站),支持PDO双向映射,数据交互周期缩短至1ms;
2. 拓扑灵活扩展:网关提供2个自
发表于 07-15 15:40
耐达讯CAN转EtherCAT网关,变频器通信升级的“真香”指南
站通过网关控制变频器。结果立竿见影:电机响应丝滑,控制周期从20ms缩短到2ms,通信瓶颈迎刃而解。
总结:
耐达讯通信技术CAN转EtherCAT网关提供了一条巧妙的升级路径:保留现有硬件,通过协议
发表于 07-15 15:34
让电磁阀“听懂”EtherCAT:耐达讯CAN转EtherCAT网关
处理两种协议的通信需求:
EtherCAT侧:作为从站接入主站网络,支持PDO映射与SDO配置,数据交互周期可压缩至1ms以内;
CAN侧:作为主站管理电磁阀控制器,兼容CiA301标
发表于 07-14 16:16
基于米尔安路飞龙派FPGA FPSoC+移植SOEM实现EtherCAT主站控制功能
on-chip RAM,内存接口和丰富的外设互联接口,定位复杂嵌入式系统、低功耗和高性能芯片市场。
DR190M芯片的PS端有两个以太网控制器,基于以太网的功能,可以实现EtherCAT主站控制
发表于 07-11 19:49



评论