 软件包改进了机器人充电基础设施的管理
软件包改进了机器人充电基础设施的管理

无线电源解决方案开发商 WiBotic 宣布推出 Commander,这是一款旨在改善能源管理的软件包——使用该公司的充电技术——专门用于包括无人机在内的大型机器人车队。此外,其软件库包提供了用于控制电池参数的 API。
WiBotic 的首席执行官兼联合创始人 Ben Waters在接受 EEWeb 采访时指出,机器人的采用正在增长,各种组织对充电系统的投资也在增长。他解释说,最大的挑战之一是将系统设计为简单灵活,同时具有可扩展性和高度安全性。
“WiBotic Commander 的目标是为机器人操作员提供软件工具,以更好地了解并优化向异构机器人车队输送电力,”沃特斯说。“该软件将提供报告,显示机器人车队在何处、何时以及使用了多少能量,而不管机器人或电池的类型如何。这将允许操作员物理移动充电站,更改充电时间表,或更改充电参数,例如提供给电池的最大电压和电流,从而提高他们的机器人的生产力——减少机器人的数量和成本——并使这些机器人的电池寿命更长。”
指挥官 API(来源:WiBotic)
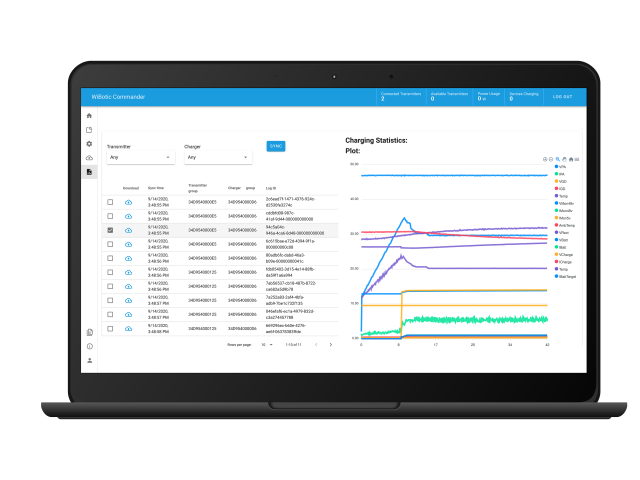
收费数据(来源:WiBotic)
能源优化
WiBotic 的无线充电系统使无人机能够完全自主充电,因此它们可以一直处于待机状态或反复飞行,而无需手动或机械更换电池。即使没有操作员在场,这种使用也能让您优化飞行时间——非常适合所有不需要专业人员在场的情况。
Commander 软件包的目标是提供充电基础设施的综合视图,包括充电可用性和状态的可视化,以及关于哪些充电系统比其他系统使用得更多的历史信息。操作员现在可以轻松确定充电平台的最佳位置,以最大限度地提高无人机活动的机会。
“对于移动机器人来说,问题通常是接触式充电站体积太大,无法放置在机器人操作的区域,”沃特斯说。“因此,机器人必须离开那个区域去充电站——让它们长时间停止使用。更好地放置充电系统并使用更小且不显眼的无线充电器,允许机器人在留在工作空间内时充电——例如,在短暂的暂停期间,或者在装载和卸载时。”
沃特斯指出,对于无人机来说,问题更为严重,因为它们相对较小的电池放电非常快。无人机的典型飞行时间为 30 分钟或更短,这意味着它的航程仅限于它在 15 分钟内可以飞行的距离,以便它有足够的电量回家。“随着最近自动飞行规则的放宽,无人机现在可以从充电站飞到另一个充电站——大大扩展了它们的航程,”沃特斯说。“但是,他们必须在起飞前知道下一个充电站的状态,以免他们到达时发现另一架无人机正在占领他们的着陆点或停止服务的充电站。在电力线或铁路检查等应用真正实现自主之前,无人机操作员必须确信充电基础设施已经到位,可以完成远程任务。”
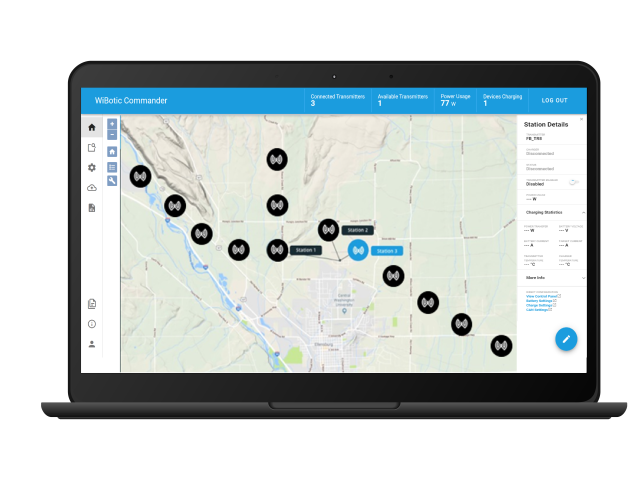
充电站地图视图(来源:WiBotic)
关键是实施主动充电技术,利用技术数据来提高电池能量。“因此,与其总是将每个电池充电到其最大电压水平和最大可能的速度 [电流]——这是大多数充电器所做的——操作员现在只需使用完成工作所需的能量,”沃特斯说。“例如,如果电池可以运行机器人 12 小时,而工作班次只有 8 小时,则没有理由将电池充电至 100%。停在 95% 时,您可以将电池寿命延长 50%。充电电流也是如此。如果机器人整夜离线 12 小时,则没有理由在 1 小时内给电池充电。指挥官可以重置该机器人及其组中的每个机器人的充电速度,使其充电速度更慢,但仍能在第二天早上做好准备。”
软件包
借助 Commander 的功能和 API,沃特斯解释了如何延长昂贵锂电池的使用寿命,收集和存储机器人车队每次电池充电的每个日志文件。“该日志文件包含有关电池的宝贵数据 [在充电过程中如何接受能量以及充电需要多长时间] 以及有关充电站的信息 [即,哪些站现在可用,哪些站历史上使用次数超过其他人]”他说。“这些信息可用于重新设计充电基础设施,让更多机器人能够更方便地充电——尤其是在‘机会充电’场景中,他们每天需要多次快速充电。这些数据还可用于监控电池性能,以在电池故障发生之前识别它们,或对不同品牌电池的性能进行基准测试。这些数据对于电池和充电安全法规日益增长的需求也很重要。”
用户可以设置模式在白天快速充电,此时机器人的正常运行时间很重要,而在夜间更慢,以最大限度地延长整体电池寿命。“从本质上讲,Commander 是一种通信机制和数据库,用于在充电站网络中收集和存储信息,”沃特斯说。“在当今的网络世界中,该架构尽可能灵活非常重要。我们的软件团队认识到了这一点,并将 Commander 开发为“docker 容器”。这意味着它是一个独立的应用程序,几乎可以在任何计算设备上运行,从 Windows 笔记本电脑到专用的 Linux 服务器,甚至是像 Raspberry Pi 这样简单的东西。由于这种架构,Commander 还可以托管在云中,通过互联网上的全球发射机网络进行数据收集。
Commander 还可用于 IT 安全至关重要的环境,但也可以使用 docker RESTful 容器 API 将其移植到任何云。在 Commander 中看到的所有数据都可以通过调用 API 甚至从外部系统来访问,以自动访问收集的信息并对其采取行动。用户界面提供对所有参数状态的直接可见性,并允许用户调整充电设置和执行系统维护,例如固件更新。“例如,仓库管理系统可以识别机器人何时停机 10 分钟,并可以询问最近的 WiBotic 发射器的状态,”沃特斯说。“如果可用,它可以将机器人送到该站进行快速充电,如果需要,它甚至可以调整该充电周期的充电电压和速度 [电流]。”
WiBotic 预计 Commander 将用于在单个设施内需要密集集群机器人车队的所有应用。“随着我们扩展 Commander 的能力,我们将探索其直接从‘智能’电池或机器人操作系统收集充电数据的能力,”沃特斯说。“这将使软件最终能够整合不使用 WiBotic 硬件的机器人。” 沃特斯评论说,随着时间的推移,我们可以期待在分散的机器人网络中得到更广泛的采用,其中每个位置可能只有一两个机器人,但在全球有数百个位置。安全机器人、检查机器人和送货机器人是这些应用的例子,它们也将受益于更好的充电基础设施管理。
审核编辑 黄昊宇
-
充电
+关注
关注
23文章
1449浏览量
98855 -
机器人
+关注
关注
213文章
31422浏览量
223597 -
设计
+关注
关注
4文章
828浏览量
71485 -
运动控制
+关注
关注
5文章
836浏览量
34663 -
能源管理
+关注
关注
0文章
632浏览量
21040
发布评论请先 登录
RT-Thread任务+消息订阅管理框架软件包:thread_manager+event_loop

机器人热管理技术体系与方案

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
瑞萨灵活配置软件包FSP 6.2.0版本的更新内容

探索RISC-V在机器人领域的潜力
复合机器人开启血浆包“零接触”搬运新时代




评论