 博塞线测量的原理
博塞线测量的原理

系统布局设计
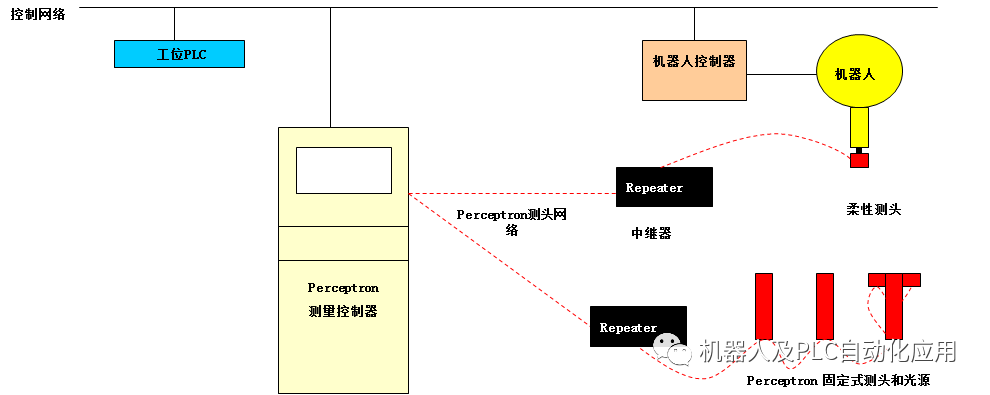
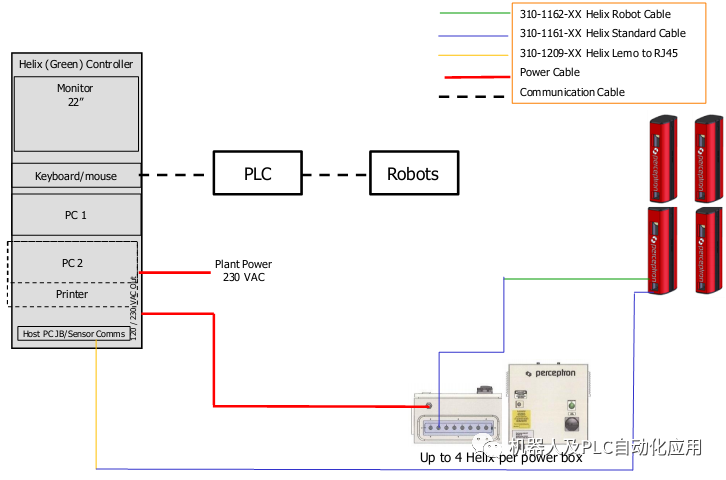
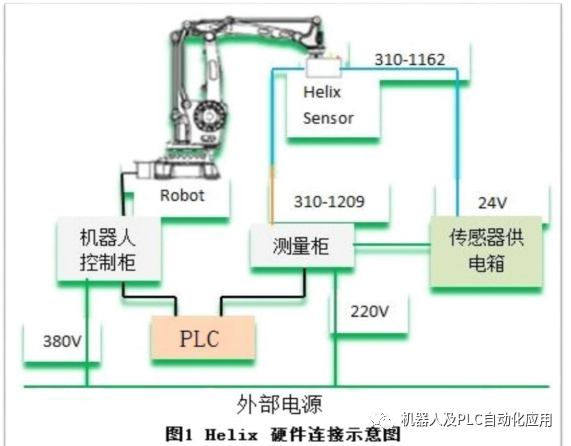
测量控制柜
测头网络
q每个测量控制柜支持多达144个测头
q固定式测头、机器人测头和外部光源共用一个网络连接
q在这个网络的末端测头需要加终端电阻。
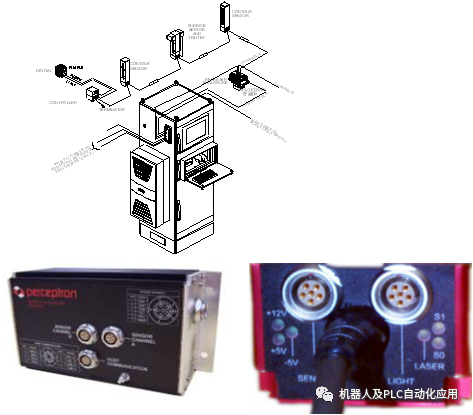
测头
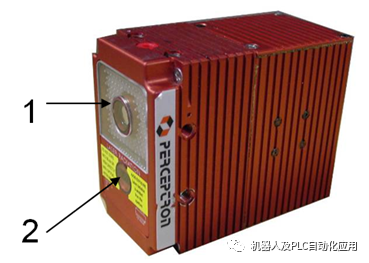
原理: 测头发射出光线,利用光的漫反射三角成像测出距离的
如图示1通过LED灯可以产生光束对孔和面进行测量
如图示2通过发光体可以 产生光线对点进行测量
激光所产生的波长是650NM
测头到工件的距离一般是(80-120MM)
测量算法原理:
被测量零件所在的坐标系。通常被理解为车身原点所在的坐标系。AutoGauge系统最终测量结果将在这个坐标系内。
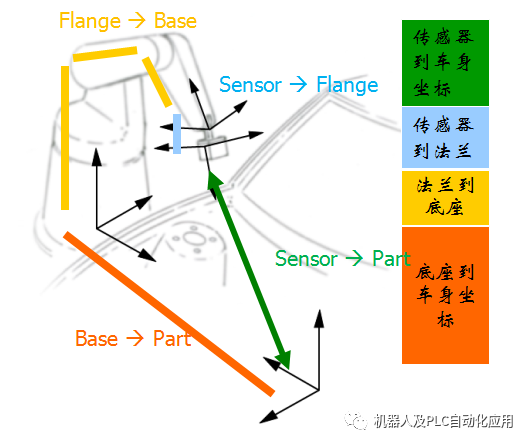
全面的坐标换算方法:
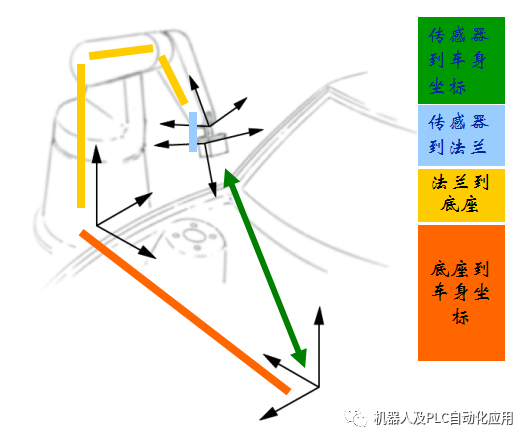
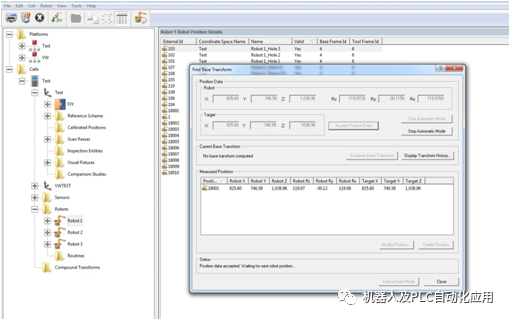
1)Base Finder 让机器人底座中心与车身坐标关联(车身原点在该机器人坐标系的坐标值)。
2)设置TCP与传感器的坐标中心重合(理论)
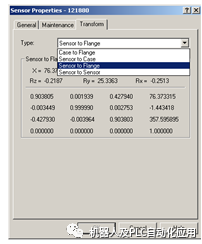
3)Tool Finder消除TCP与传感器坐标中心的实际误差(TCP到法兰盘轴心的坐标值)。
4)通过控制器软件的计算最终报告测量特征在车身坐标系中的偏差值。
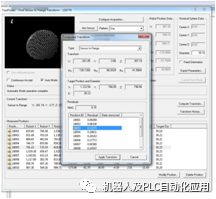
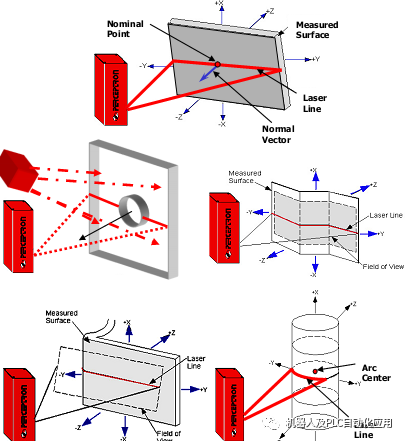
Sensor Space传感器的工作原理:实际上测头就是一个精确度很高的工业相机
1) 采用三角测量法,每个sensor自身有个坐标系
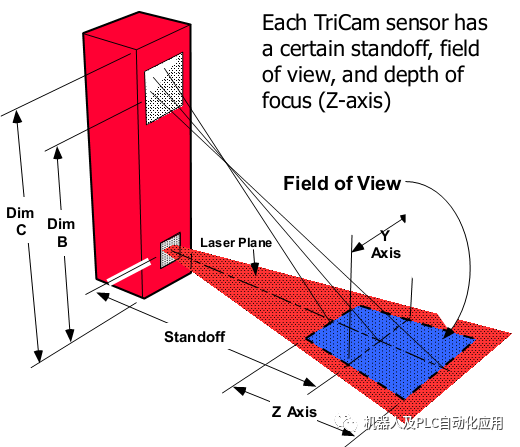
每个TriCam传感器都有一定的间距,视野和焦深(Z轴)
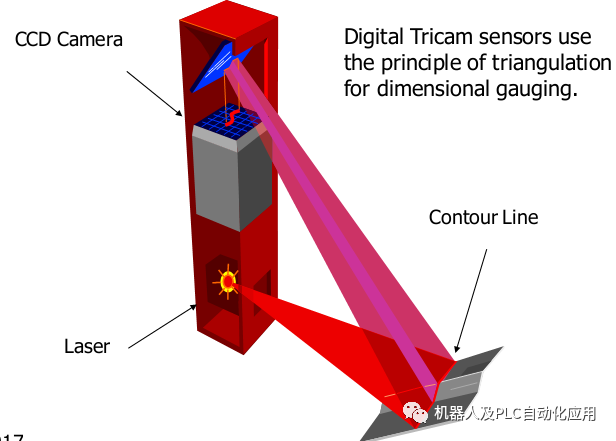
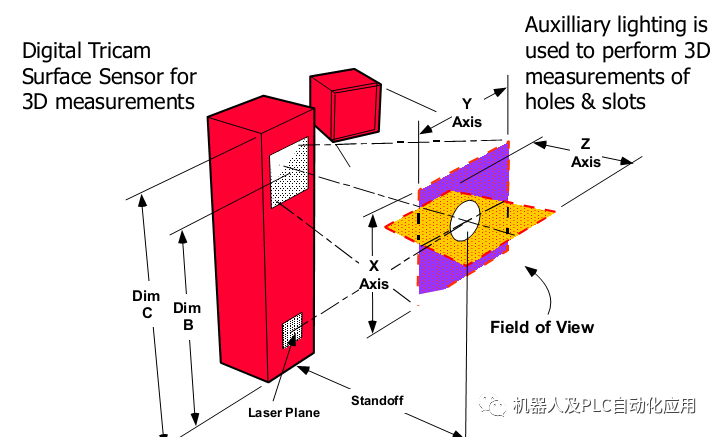
用于1D和2D测量的数字Tricam轮廓传感器

数字Tricam传感器使用三角测量原理进行尺寸测量。
2) C型测头的图像通过对图像的调整来计算测量点的坐标,测量2维测点。
CCD摄像机捕获反射的激光线的图像。算法处理图像以执行尺寸测量。
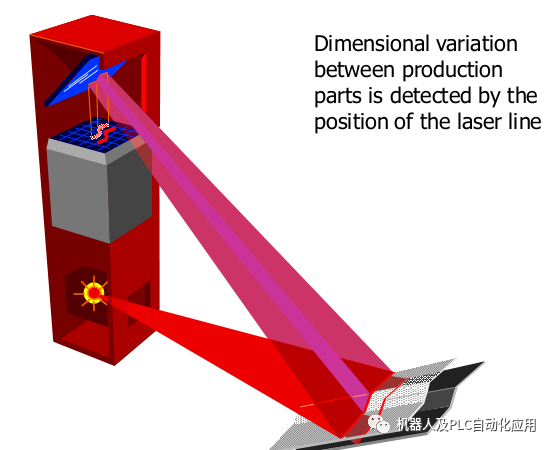
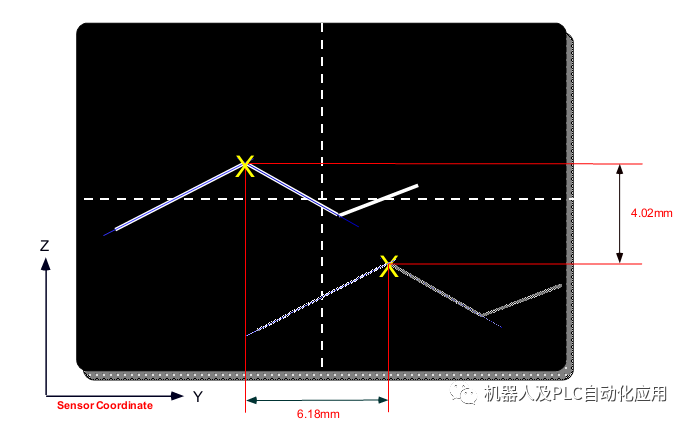
生产零件之间的尺寸变化通过激光线的位置进行检测
3) S型通过两拍照对3维测点进行测量,第一次是XY方向,第二次是Z方向。

辅助照明用于执行孔和槽的3D测量
•计量学是Perceptron的核心业务
•专为测量复杂的焊接钣金组件上的特征而开发的AutoGaugehas> 20种算法
•经过20多年开发和优化的算法
•与三坐标测量机相关性强
3.坐标转换
车空间
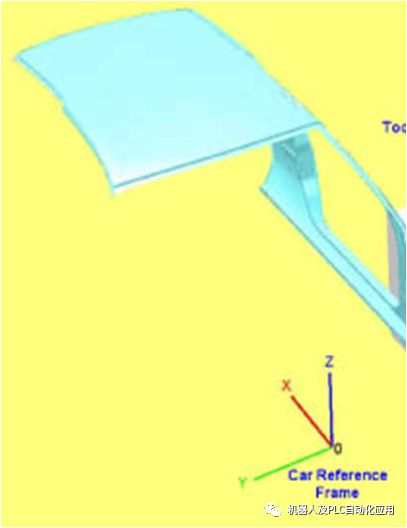
AutoGauge系统要测量的任何零件都将具有自己的坐标系。这称为零件空间。也称为零件框架,车身坐标系或汽车参考框架。
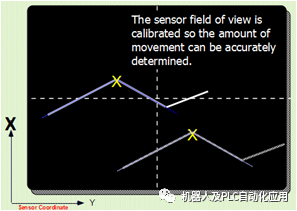
传感器空间
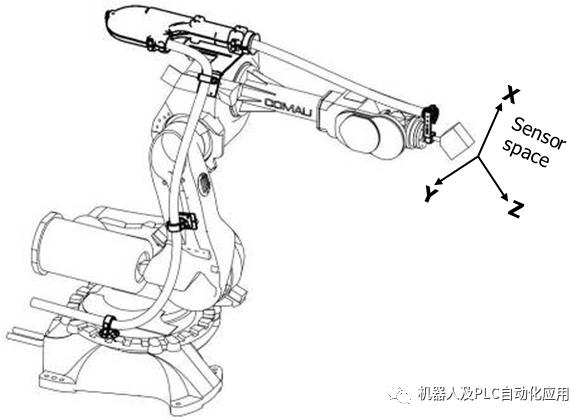
每个传感器(对于固定系统)或传感器位置(对于机器人系统)也都有自己的坐标系。这称为传感器空间或传感器框架。
审核编辑 :李倩
-
传感器
+关注
关注
2578文章
55567浏览量
794108 -
测量
+关注
关注
10文章
5732浏览量
116994
原文标题:今天说说在美国博塞线测量的原理
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录

风机振动跳停故障,汉瑞博技术员助力8小时快速开机
Bamtone班通:线宽/线距/线径测量设备性价比优选

地平线与博泰车联网合作打造下一代舱驾融合整车智能体

博泰车联网与地平线达成战略合作

[VirtualLab] 施密特-卡塞格林望远镜
怎么有效测量PCB线宽线距?

斯坦福锁相放大器与塞恩锁相放大器的选型对比分析

尾塞气密性检测仪怎么用-岳信仪器

在线测径仪|纸管外径无损精准测量,产线品控高效升级
PCB 背钻塞孔翻车记!绿油凸起竟让焊接 “手牵手” 短路
绿油塞孔工艺的缺点有哪些?
电阻测量技术的双生花:两线法与四线法的科学探秘



评论